深度学习与TensorFlow实战(十一)卷积神经网络—VGG神经网络应用 图像风格迁移
先看一下图像效果。
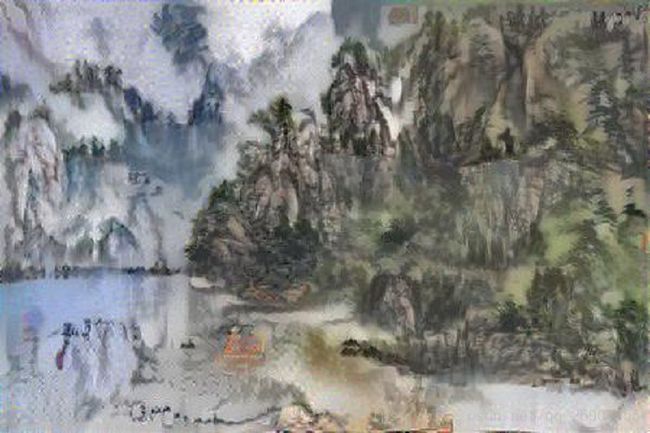
把图像A转成B风格的山水画,结果C。
A

B

结果C:
训练好的VGG19模型下载:http://www.vlfeat.org/matconvnet/models/beta16/imagenet-vgg-verydeep-19.mat
model.py代码:
import tensorflow as tf
import numpy as np
import settings
import scipy.io
import scipy.misc
class Model(object):
def __init__(self, content_path, style_path):
self.content = self.loadimg(content_path) # 加载内容图片
self.style = self.loadimg(style_path) # 加载风格图片
self.random_img = self.get_random_img() # 生成噪音内容图片
self.net = self.vggnet() # 建立vgg网络
def vggnet(self):
# 读取预训练的vgg模型
vgg = scipy.io.loadmat(settings.VGG_MODEL_PATH)
vgg_layers = vgg['layers'][0]
net = {}
# 使用预训练的模型参数构建vgg网络的卷积层和池化层
# 全连接层不需要
# 注意,除了input之外,这里参数都为constant,即常量
# 和平时不同,我们并不训练vgg的参数,它们保持不变
# 需要进行训练的是input,它即是我们最终生成的图像
net['input'] = tf.Variable(np.zeros([1, settings.IMAGE_HEIGHT, settings.IMAGE_WIDTH, 3]), dtype=tf.float32)
# 参数对应的层数可以参考vgg模型图
net['conv1_1'] = self.conv_relu(net['input'], self.get_wb(vgg_layers, 0))
net['conv1_2'] = self.conv_relu(net['conv1_1'], self.get_wb(vgg_layers, 2))
net['pool1'] = self.pool(net['conv1_2'])
net['conv2_1'] = self.conv_relu(net['pool1'], self.get_wb(vgg_layers, 5))
net['conv2_2'] = self.conv_relu(net['conv2_1'], self.get_wb(vgg_layers, 7))
net['pool2'] = self.pool(net['conv2_2'])
net['conv3_1'] = self.conv_relu(net['pool2'], self.get_wb(vgg_layers, 10))
net['conv3_2'] = self.conv_relu(net['conv3_1'], self.get_wb(vgg_layers, 12))
net['conv3_3'] = self.conv_relu(net['conv3_2'], self.get_wb(vgg_layers, 14))
net['conv3_4'] = self.conv_relu(net['conv3_3'], self.get_wb(vgg_layers, 16))
net['pool3'] = self.pool(net['conv3_4'])
net['conv4_1'] = self.conv_relu(net['pool3'], self.get_wb(vgg_layers, 19))
net['conv4_2'] = self.conv_relu(net['conv4_1'], self.get_wb(vgg_layers, 21))
net['conv4_3'] = self.conv_relu(net['conv4_2'], self.get_wb(vgg_layers, 23))
net['conv4_4'] = self.conv_relu(net['conv4_3'], self.get_wb(vgg_layers, 25))
net['pool4'] = self.pool(net['conv4_4'])
net['conv5_1'] = self.conv_relu(net['pool4'], self.get_wb(vgg_layers, 28))
net['conv5_2'] = self.conv_relu(net['conv5_1'], self.get_wb(vgg_layers, 30))
net['conv5_3'] = self.conv_relu(net['conv5_2'], self.get_wb(vgg_layers, 32))
net['conv5_4'] = self.conv_relu(net['conv5_3'], self.get_wb(vgg_layers, 34))
net['pool5'] = self.pool(net['conv5_4'])
return net
def conv_relu(self, input, wb):
conv = tf.nn.conv2d(input, wb[0], strides=[1, 1, 1, 1], padding='SAME')
relu = tf.nn.relu(conv + wb[1])
return relu
def pool(self, input):
return tf.nn.max_pool(input, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
def get_wb(self, layers, i):
#从预训练好的vgg模型中读取参数
w = tf.constant(layers[i][0][0][0][0][0])
bias = layers[i][0][0][0][0][1]
b = tf.constant(np.reshape(bias, (bias.size)))
return w, b
def get_random_img(self):
noise_image = np.random.uniform(-20, 20, [1, settings.IMAGE_HEIGHT, settings.IMAGE_WIDTH, 3])
random_img = noise_image * settings.NOISE + self.content * (1 - settings.NOISE)
return random_img
def loadimg(self, path):
# 读取图片
image = scipy.misc.imread(path)
# 重新设定图片大小
image = scipy.misc.imresize(image, [settings.IMAGE_HEIGHT, settings.IMAGE_WIDTH])
# 改变数组形状,其实就是把它变成一个batch_size=1的batch
image = np.reshape(image, (1, settings.IMAGE_HEIGHT, settings.IMAGE_WIDTH, 3))
# 减去均值,使其数据分布接近0
image = image - settings.IMAGE_MEAN_VALUE
return image
if __name__ == '__main__':
Model(settings.CONTENT_IMAGE, settings.STYLE_IMAGE)settings.py代码:
# 内容图片路径
CONTENT_IMAGE = 'images/content.jpg'
# 风格图片路径
STYLE_IMAGE = 'images/style.jpg'
# 输出图片路径
OUTPUT_IMAGE = 'output/output'
# 预训练的vgg模型路径
VGG_MODEL_PATH = 'imagenet-vgg-verydeep-19.mat'
# 图片宽度
IMAGE_WIDTH = 450
# 图片高度
IMAGE_HEIGHT = 300
# 定义计算内容损失的vgg层名称及对应权重的列表
CONTENT_LOSS_LAYERS = [('conv4_2', 0.5),('conv5_2',0.5)]
# 定义计算风格损失的vgg层名称及对应权重的列表
STYLE_LOSS_LAYERS = [('conv1_1', 0.2), ('conv2_1', 0.2), ('conv3_1', 0.2), ('conv4_1', 0.2), ('conv5_1', 0.2)]
# 噪音比率
NOISE = 0.5
# 图片RGB均值
IMAGE_MEAN_VALUE = [128.0, 128.0, 128.0]
# 内容损失权重
ALPHA = 1
# 风格损失权重
BETA = 500
# 训练次数
TRAIN_STEPS = 3000train.py代码:
import tensorflow as tf
import settings
import models
import numpy as np
import scipy.misc
def loss(sess, model):
# 先计算内容损失函数
# 获取定义内容损失的vgg层名称列表及权重
content_layers = settings.CONTENT_LOSS_LAYERS
# 将内容图片作为输入,方便后面提取内容图片在各层中的特征矩阵
sess.run(tf.assign(model.net['input'], model.content))
# 内容损失累加量
content_loss = 0.0
# 逐个取出衡量内容损失的vgg层名称及对应权重
for layer_name, weight in content_layers:
# 提取内容图片在layer_name层中的特征矩阵
p = sess.run(model.net[layer_name])
# 提取噪音图片在layer_name层中的特征矩阵
x = model.net[layer_name]
# 长x宽
M = p.shape[1] * p.shape[2]
# 信道数
N = p.shape[3]
# 根据公式计算损失,并进行累加
content_loss += (1.0 / (2 * M * N)) * tf.reduce_sum(tf.pow(p - x, 2)) * weight
# 将损失对层数取平均
content_loss /= len(content_layers)
# 再计算风格损失函数
style_layers = settings.STYLE_LOSS_LAYERS
# 将风格图片作为输入,方便后面提取风格图片在各层中的特征矩阵
sess.run(tf.assign(model.net['input'], model.style))
# 风格损失累加量
style_loss = 0.0
# 逐个取出衡量风格损失的vgg层名称及对应权重
for layer_name, weight in style_layers:
# 提取风格图片在layer_name层中的特征矩阵
a = sess.run(model.net[layer_name])
# 提取噪音图片在layer_name层中的特征矩阵
x = model.net[layer_name]
# 长x宽
M = a.shape[1] * a.shape[2]
# 信道数
N = a.shape[3]
# 求风格图片特征的gram矩阵
A = gram(a, M, N)
# 求噪音图片特征的gram矩阵
G = gram(x, M, N)
# 根据公式计算损失,并进行累加
style_loss += (1.0 / (4 * M * M * N * N)) * tf.reduce_sum(tf.pow(G - A, 2)) * weight
# 将损失对层数取平均
style_loss /= len(style_layers)
# 将内容损失和风格损失加权求和,构成总损失函数
loss = settings.ALPHA * content_loss + settings.BETA * style_loss
return loss
def gram(x, size, deep):
# 改变shape为(size,deep)
x = tf.reshape(x, (size, deep))
# 求xTx
g = tf.matmul(tf.transpose(x), x)
return g
def train():
# 创建一个模型
model = models.Model(settings.CONTENT_IMAGE, settings.STYLE_IMAGE)
# 创建session
with tf.Session() as sess:
# 全局初始化
sess.run(tf.global_variables_initializer())
# 定义损失函数
cost = loss(sess, model)
# 创建优化器
optimizer = tf.train.AdamOptimizer(1.0).minimize(cost)
# 再初始化一次(主要针对于第一次初始化后又定义的运算,不然可能会报错)
sess.run(tf.global_variables_initializer())
# 使用噪声图片进行训练
sess.run(tf.assign(model.net['input'], model.random_img))
# 迭代指定次数
for step in range(settings.TRAIN_STEPS):
# 进行一次反向传播
sess.run(optimizer)
# 每隔一定次数,输出一下进度,并保存当前训练结果
if step % 50 == 0:
print ('step {} is down.'.format(step))
# 取出input的内容,这是生成的图片
img = sess.run(model.net['input'])
# 训练过程是减去均值的,这里要加上
img += settings.IMAGE_MEAN_VALUE
# 这里是一个batch_size=1的batch,所以img[0]才是图片内容
img = img[0]
# 将像素值限定在0-255,并转为整型
img = np.clip(img, 0, 255).astype(np.uint8)
# 保存图片
scipy.misc.imsave('{}-{}.jpg'.format(settings.OUTPUT_IMAGE,step), img)
# 保存最终训练结果
img = sess.run(model.net['input'])
img += settings.IMAGE_MEAN_VALUE
img = img[0]
img = np.clip(img, 0, 255).astype(np.uint8)
scipy.misc.imsave('{}.jpg'.format(settings.OUTPUT_IMAGE), img)
if __name__ == '__main__':
train()未完待续。。。。。。。。。。。。