视觉SLAM笔记(39) 求解 ICP
视觉SLAM笔记(39) 求解 ICP
- 1. SVD 方法
- 2. 非线性优化方法
1. SVD 方法
使用 SVD 以及非线性优化来求解 ICP
使用两个 RGB-D 图像,通过特征匹配获取两组 3D 点,最后用 ICP 计算它们的位姿变换
由于 OpenCV 目前还没有计算两组带匹配点的 ICP 的方法,而且它的原理也并不复杂
所以自己来实现一个 ICP
ICP 的实现方式和前文 视觉SLAM笔记(38) 3D-3D: ICP 讲述的是一致的
void pose_estimation_3d3d(
const vector<Point3f>& pts1,
const vector<Point3f>& pts2,
Mat& R, Mat& t
)
{
Point3f p1, p2; // 质心
// 计算质心位置
int N = pts1.size();
for (int i = 0; i < N; i++)
{
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Point3f(Vec3f(p1) / N);
p2 = Point3f(Vec3f(p2) / N);
// 去质心坐标
vector<Point3f> q1(N), q2(N);
for (int i = 0; i < N; i++)
{
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// 计算 q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (int i = 0; i < N; i++)
{
W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose();
}
cout << "W=" << W << endl;
// 对 W 进行 SVD 分解
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
cout << "U=" << U << endl;
cout << "V=" << V << endl;
// 计算 R, t
Eigen::Matrix3d R_ = U * (V.transpose());
Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);
// 转换车矩阵cv::Mat
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}
调用 Eigen 进行 SVD,然后计算 R, t矩阵
int main(int argc, char** argv)
{
if (argc != 5)
{
cout << "usage: pose_estimation_3d3d img1 img2 depth1 depth2" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
//-- 特征提取
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
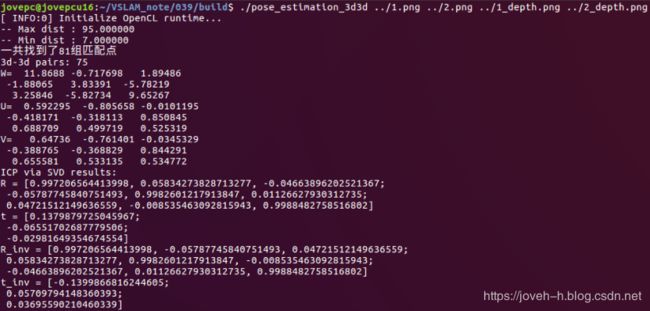
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
// 建立3D点
Mat depth1 = imread(argv[3], CV_LOAD_IMAGE_UNCHANGED); // 深度图为16位无符号数,单通道图像
Mat depth2 = imread(argv[4], CV_LOAD_IMAGE_UNCHANGED); // 深度图为16位无符号数,单通道图像
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); // 相机内参
vector<Point3f> pts1, pts2;
for (DMatch m : matches)
{
ushort d1 = depth1.ptr<unsigned short>(int(keypoints_1[m.queryIdx].pt.y))[int(keypoints_1[m.queryIdx].pt.x)];
ushort d2 = depth2.ptr<unsigned short>(int(keypoints_2[m.trainIdx].pt.y))[int(keypoints_2[m.trainIdx].pt.x)];
if (d1 == 0 || d2 == 0) // bad depth
continue;
Point2d p1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); // 像素坐标转相机归一化坐标
Point2d p2 = pixel2cam(keypoints_2[m.trainIdx].pt, K);
float dd1 = float(d1) / 5000.0;
float dd2 = float(d2) / 5000.0;
pts1.push_back(Point3f(p1.x*dd1, p1.y*dd1, dd1)); // 添加第一个图的特征位置 3D 点
pts2.push_back(Point3f(p2.x*dd2, p2.y*dd2, dd2));
}
// 3D-3D位姿估计,ICP通过SVD方法
cout << "3d-3d pairs: " << pts1.size() << endl;
Mat R, t;
pose_estimation_3d3d(pts1, pts2, R, t);
cout << "ICP via SVD results: " << endl;
cout << "R = " << R << endl;
cout << "t = " << t << endl;
cout << "R_inv = " << R.t() << endl;
cout << "t_inv = " << -R.t() *t << endl;
}
输出了匹配后的结果,不过请注意,由于前面的推导是按照 p p pi = R p Rp Rpi ′ + t ′ + t ′+t进行的
这里的 R,t 是第二帧到第一帧的变换,与前面 视觉SLAM笔记(37) 求解 PnP 部分是相反的
所以在输出结果中,同时打印了逆变换:
可以比较一下 ICP 与 PnP, 对极几何的运动估计结果之间的差异
可以认为,在这个过程中使用了越来越多的信息(没有深度——有一个图的深度——有两个图的深度)
因此,在深度准确的情况下,得到的估计也将越来越准确
但是,由于 Kinect 的深度图存在噪声,而且有可能存在数据丢失的情况
使得我们不得不丢弃一些没有深度数据的特征点,这可能导致 ICP 的估计不够准确
并且,如果特征点丢弃得太多,可能引起由于特征点太少,无法进行运动估计的情况
2. 非线性优化方法
现在用非线性优化来计算 ICP,依然使用李代数来表达相机位姿
与SVD 思路不同的地方在于,在优化中不仅考虑相机的位姿,同时会优化 3D 点的空间位置
RGB-D 相机每次可以观测到路标点的三维位置,从而产生一个 3D 观测数据
不过,由于 g2o/sba 中没有提供 3D 到 3D 的边
而又想使用 g2o/sba 中李代数实现的位姿节点
所以最好的方式是自定义一种这样的边EdgeProjectXYZRGBDPoseOnly,并向 g2o 提供解析求导方式
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, g2o::VertexSE3Expmap>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d& point) : _point(point) {}
virtual void computeError()
{
const g2o::VertexSE3Expmap* pose = static_cast<const g2o::VertexSE3Expmap*> (_vertices[0]);
// measurement is p, point is p'
_error = _measurement - pose->estimate().map(_point);
}
virtual void linearizeOplus()
{
g2o::VertexSE3Expmap* pose = static_cast<g2o::VertexSE3Expmap *>(_vertices[0]);
g2o::SE3Quat T(pose->estimate());
Eigen::Vector3d xyz_trans = T.map(_point);
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
_jacobianOplusXi(0, 0) = 0;
_jacobianOplusXi(0, 1) = -z;
_jacobianOplusXi(0, 2) = y;
_jacobianOplusXi(0, 3) = -1;
_jacobianOplusXi(0, 4) = 0;
_jacobianOplusXi(0, 5) = 0;
_jacobianOplusXi(1, 0) = z;
_jacobianOplusXi(1, 1) = 0;
_jacobianOplusXi(1, 2) = -x;
_jacobianOplusXi(1, 3) = 0;
_jacobianOplusXi(1, 4) = -1;
_jacobianOplusXi(1, 5) = 0;
_jacobianOplusXi(2, 0) = -y;
_jacobianOplusXi(2, 1) = x;
_jacobianOplusXi(2, 2) = 0;
_jacobianOplusXi(2, 3) = 0;
_jacobianOplusXi(2, 4) = 0;
_jacobianOplusXi(2, 5) = -1;
}
bool read(istream& in) {}
bool write(ostream& out) const {}
protected:
Eigen::Vector3d _point;
};
这是一个一元边,写法类似于前面提到的 g2o::EdgeSE3ProjectXYZ
不过观测量从 2 维变成了 3 维,内部没有相机模型,并且只关联到一个节点
雅可比矩阵给出了关于相机位姿的导数,是一个3 × 6 的矩阵
调用 g2o 进行优化的代码是相似的,设定好图优化的节点和边即可
调用优化函数进行求解
// 使用 BA 优化
cout << "calling bundle adjustment" << endl;
bundleAdjustment(pts1, pts2, R, t);
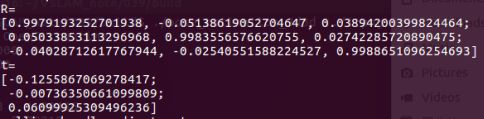
现在,来看看优化的结果:

发现只迭代一次后,总体误差就已经稳定不变,说明仅在一次迭代之后算法即已收敛
从位姿求解的结果可以看出,它和前面 SVD 给出的位姿结果几乎一模一样

这说明 SVD 已经给出了优化问题的解析解
所以,本实验中可以认为 SVD 给出的结果是相机位姿的最优值
需要说明的是,在本例的 ICP 中,使用了在两个图都有深度读数的特征点
然而,事实上,只要其中一个图深度确定,就能用类似于 PnP 的误差方式,把它们也加到优化中来
同时,除了相机位姿之外,将空间点也作为优化变量考虑,亦是一种解决问题的方式
应当清楚,实际的求解是非常灵活的,不必拘泥于某种固定的形式
如果同时考虑点和相机,整个问题就变得 更自由 了,可能会得到其他的解
比如,可以让相机少转一些角度,而把点多移动一些
这从另一侧面反映出,在 Bundle Adjustment 里面,会希望有尽可能多的约束
因为多次观测会带来更多的信息,就能够更准确地估计每个变量
参考:
《视觉SLAM十四讲》
相关推荐:
视觉SLAM笔记(38) 3D-3D: ICP
视觉SLAM笔记(37) 求解 PnP
视觉SLAM笔记(36) 3D-2D: PnP
视觉SLAM笔记(35) 三角化求特征点的空间位置
视觉SLAM笔记(34) 三角测量