opencv实战从0到N (7)—— 模板匹配,形状匹配
opencv实战从0到N (7)—— 模板匹配,形状匹配
模板匹配,形状匹配
1,区域像素值匹配
利用模板图像像卷积一样遍历整幅图像,以某种比对方式(距离差之和,相关度等)计算相似度,
在结果图像上寻找最大或最小值(方法不同有些值越大越相似,有些相反)作为匹配结果。
函数:matchTemplate(src, templ, result, match_method)
Mat TempleMatch(int match_method, Mat&templ, Mat&img, Point& matchLoc, double* matchValue)
{
bool use_mask = false;
Mat result, mask;
bool method_accepts_mask = (CV_TM_SQDIFF == match_method || match_method == CV_TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{
matchTemplate(img, templ, result, match_method, mask);
}
else
{
matchTemplate(img, templ, result, match_method);
}
/// Localizing the best match with minMaxLoc
double minVal; double maxVal; Point minLoc; Point maxLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());
/// For SQDIFF and SQDIFF_NORMED, the best matches are lower values. For all the other methods, the higher the better
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
*matchValue = minVal;
}
else
{
matchLoc = maxLoc;
*matchValue = maxVal;
}
return result;
}
2,外形轮廓匹配
先求出模板的轮廓,求轮廓的矩特征。再求出搜索图的所有轮廓及特征,与模板的轮廓特征
比较,差值最小的即为匹配结果。
函数:matchShapes(contours1, contours2, CV_CONTOURS_MATCH_I1, 0.0);
int ShapeMatch(Mat& srcImg, Mat& srcImg2)
{
cvtColor(srcImg, srcImg, CV_BGR2GRAY);
threshold(srcImg, srcImg, 150, 255, CV_THRESH_BINARY);
vector> contours;
vector hierarcy;
findContours(srcImg, contours, hierarcy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
Mat src_gray;
cvtColor(srcImg2, src_gray, CV_BGR2GRAY);
threshold(src_gray, src_gray, 150, 255, CV_THRESH_BINARY);
vector> contours2;
vector hierarcy2;
findContours(src_gray, contours2, hierarcy2, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);
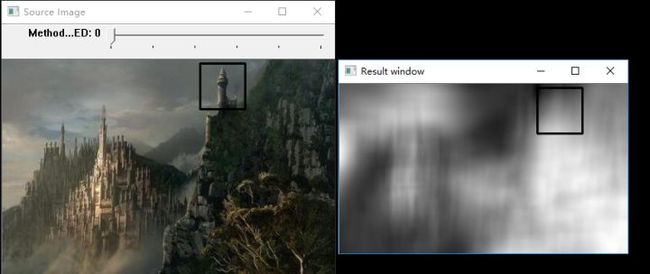
for (int i = 0; i 3.模板匹配测试:
bool use_mask;
Mat img; Mat templ; Mat mask; Mat result;
const char* image_window = "Source Image";
const char* result_window = "Result window";
int match_method;
int max_Trackbar = 5;
/// Function Headers
void MatchingMethod(int, void*);
int main(int argc, char** argv)
{
img = imread("2.jpg", IMREAD_COLOR);
templ = imread("tp.jpg", IMREAD_COLOR);
if (argc > 3) {
use_mask = true;
mask = imread(argv[3], IMREAD_COLOR);
}
if (img.empty() || templ.empty() || (use_mask && mask.empty()))
{
cout << "Can't read one of the images" << endl;
return -1;
}
/// Create windows
namedWindow(image_window, WINDOW_AUTOSIZE);
namedWindow(result_window, WINDOW_AUTOSIZE);
/// Create Trackbar
const char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod);
//! [create_trackbar]
MatchingMethod(0, 0);
//! [wait_key]
waitKey(0);
return 0;
//! [wait_key]
}
void MatchingMethod(int, void*)
{
//! [copy_source]
/// Source image to display
Mat img_display;
img.copyTo(img_display);
/// Create the result matrix
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create(result_rows, result_cols, CV_32FC1);
/// Do the Matching and Normalize
bool method_accepts_mask = (CV_TM_SQDIFF == match_method || match_method == CV_TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{
matchTemplate(img, templ, result, match_method, mask);
}
else
{
matchTemplate(img, templ, result, match_method);
}
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());
/// For SQDIFF and SQDIFF_NORMED, the best matches are lower values. For all the other methods, the higher the better
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
}
else
{
matchLoc = maxLoc;
}
rectangle(img_display, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
rectangle(result, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
imshow(image_window, img_display);
imshow(result_window, result);
return;
}
更多内容关注微信公众号:ML_Study