FCN的学习及理解(Fully Convolutional Networks for Semantic Segmentation)
论文Fully Convolutional Networks for Semantic Segmentation 是图像分割的milestone论文。
理清一下我学习过程中关注的重点。
fcn开源代码
github下载地址 https://github.com/shelhamer/fcn.berkeleyvision.org
核心思想
该论文包含了当下CNN的三个思潮
- 不含全连接层(fc)的全卷积(fully conv)网络。可适应任意尺寸输入。
- 增大数据尺寸的反卷积(deconv)层。能够输出精细的结果。
- 结合不同深度层结果的跳级(skip)结构。同时确保鲁棒性和精确性。
一些重点:
损失函数是在最后一层的 spatial map上的 pixel 的 loss 和,在每一个 pixel 使用 softmax loss
使用 skip 结构融合多层(3层)输出,底层网络应该可以预测更多的位置信息,因为他的感受野小可以看到小的 pixels
上采样 lower-resolution layers 时,如果采样后的图因为 padding 等原因和前面的图大小不同,使用 crop ,当裁剪成大小相同的,spatially aligned ,使用 concat 操作融合两个层
预备知识:
CNN与FCN
- 通常cnn网络在卷积之后会接上若干个全连接层,将卷积层产生的特征图(feature map)映射成为一个固定长度的特征向量。一般的CNN结构适用于图像级别的分类和回归任务,因为它们最后都期望得到输入图像的分类的概率,如ALexNet网络最后输出一个1000维的向量表示输入图像属于每一类的概率。
- FCN对图像进行像素级的分类,从而解决了语义级别的图像分割问题。与经典的CNN在卷积层使用全连接层得到固定长度的特征向量进行分类不同,FCN可以接受任意尺寸的输入图像,采用反卷积层对最后一个卷基层的特征图(feature map)进行上采样,使它恢复到输入图像相同的尺寸,从而可以对每一个像素都产生一个预测,同时保留了原始输入图像中的空间信息,最后奇偶在上采样的特征图进行像素的分类。
-全卷积网络(FCN)是从抽象的特征中恢复出每个像素所属的类别。即从图像级别的分类进一步延伸到像素级别的分类。 - FCN将传统CNN中的全连接层转化成一个个的卷积层。如下图所示,在传统的CNN结构中,前5层是卷积层,第6层和第7层分别是一个长度为4096的一维向量,第8层是长度为1000的一维向量,分别对应1000个类别的概率。FCN将这3层表示为卷积层,卷积核的大小(通道数,宽,高)分别为(4096,1,1)、(4096,1,1)、(1000,1,1)。所有的层都是卷积层,故称为全卷积网络。

简单的说,FCN与CNN的区别在于FCN把CNN最后的全连接层换成卷积层,输出一张已经label好的图。
网络结构
网络结构如下。输入可为任意尺寸图像彩色图像;输出与输入尺寸相同,深度为:20类目标+背景=21。 (在PASCAL数据集上进行的,PASCAL一共20类)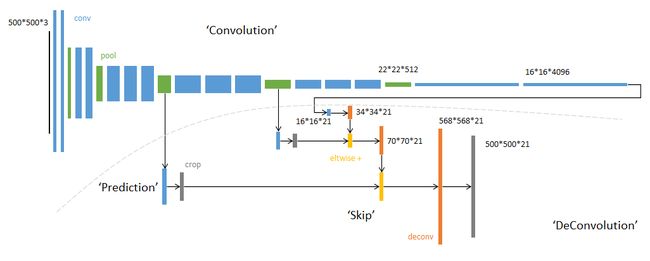
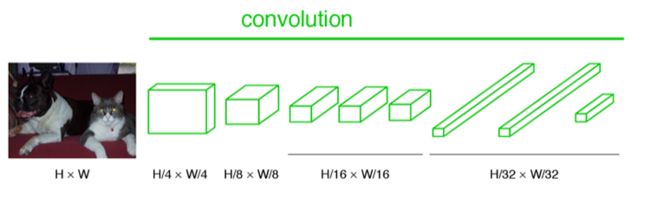
全卷积-提取特征
虚线上半部分为全卷积网络。(蓝:卷积,绿:max pooling)。对于不同尺寸的输入图像,各层数据的尺寸(height,width)相应变化,深度(channel)不变。
这部分由深度学习分类问题中经典网络AlexNet1修改而来。只不过,把最后两个全连接层(fc)改成了卷积层。
论文中,达到最高精度的分类网络是VGG16,但提供的模型基于AlexNet。此处使用AlexNet便于绘图。
全连接层转换为卷积层:在两种变换中,将全连接层转化为卷积层在实际运用中更加有用。假设一个卷积神经网络的输入是 224x224x3 的图像,一系列的卷积层和下采样层将图像数据变为尺寸为 7x7x512 的激活数据体。AlexNet使用了两个尺寸为4096的全连接层,最后一个有1000个神经元的全连接层用于计算分类评分。我们可以将这3个全连接层中的任意一个转化为卷积层:
针对第一个连接区域是[7x7x512]的全连接层,令其滤波器尺寸为F=7,这样输出数据体就为[1x1x4096]了。
针对第二个全连接层,令其滤波器尺寸为F=1,这样输出数据体为[1x1x4096]。
对最后一个全连接层也做类似的,令其F=1,最终输出为[1x1x1000]
逐像素预测
虚线下半部分中,分别从卷积网络的不同阶段,以卷积层(蓝色×3)预测深度为21的分类结果。
例:第一个预测模块
输入16*16*4096,卷积模板尺寸1*1,输出16*16*21。相当于对每个像素施加一个全连接层,从4096维特征,预测21类结果。
怎么具体逐像素点预测分类的:
参考博客:http://www.cnblogs.com/gujianhan/p/6030639.html
采用反卷积层对最后一个卷积层的feature map进行上采样, 使它恢复到输入图像相同的尺寸,从而可以对每个像素都产生了一个预测, 同时保留了原始输入图像中的空间信息, 最后在上采样的特征图上进行逐像素分类。
具体过程:
经过多次卷积和pooling以后,得到的图像越来越小,分辨率越来越低。其中图像到 H/32∗W/32 的时候图片是最小的一层时,所产生图叫做heatmap热图,热图就是我们最重要的高维特征图。
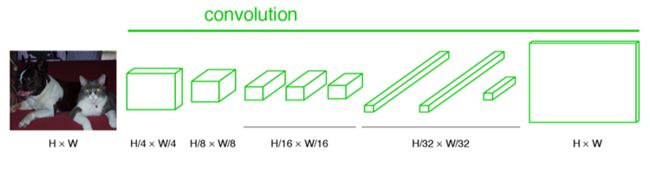
得到高维特征的heatmap之后就是最重要的一步也是最后的一步对原图像进行upsampling,把图像进行放大、放大、放大,到原图像的大小。
(也就是将高维特征图翻译成原图时对应的分割图像!!)
最后的输出是21张heatmap经过upsampling变为原图大小的图片,为了对每个像素进行分类预测label成最后已经进行语义分割的图像,这里有一个小trick,就是最后通过逐个像素地求其在21张图像该像素位置的最大数值描述(概率)作为该像素的分类。因此产生了一张已经分类好的图片,如下图右侧有狗狗和猫猫的图。
反卷积-升采样
(这里会先进行上采样,即扩大像素;再进行卷积——通过学习获得权值)
下半部分,反卷积层(橙色×3)可以把输入数据尺寸放大。和卷积层一样,上采样的具体参数经过训练确定。
这里图像的反卷积与下图的full卷积原理是一样的,使用了这一种反卷积手段使得图像可以变大,FCN作者使用的方法是这里所说反卷积的一种变体,这样就可以获得相应的像素值,图像可以实现end to end。
(feature map值与权重不同,生成的上采样的二值区域也是不一样的。)
例:反卷积2
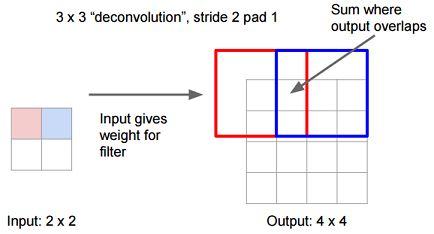
输入:每个像素值等于filter的权重
输出:步长为stride,截取的宽度为pad。

跳级结构
如下图所示:对原图进行卷积conv1、pool1后图像缩小为1/2;对图像进行第二次卷积conv2、pool2后图像缩小为1/4;对图像进行第三次卷积conv3、pool3后图像缩小为1/8,此时保留pool3的featuremap;对图像进行第四次卷积conv4、pool4后图像缩小为1/16,此时保留pool4的featuremap;对图像进行第五次卷积conv5、pool5后图像缩小为1/32,然后把原来CNN操作过程中的全连接编程卷积操作的conv6、conv7,图像的featuremap的大小依然为原图的1/32,此时图像不再叫featuremap而是叫heatmap。
其实直接使用前两种结构就已经可以得到结果了,这个上采样是通过反卷积(deconvolution)实现的,对第五层的输出(32倍放大)反卷积到原图大小。但是得到的结果还上不不够精确,一些细节无法恢复。于是将第四层的输出和第三层的输出也依次反卷积,分别需要16倍和8倍上采样,结果过也更精细一些了。这种做法的好处是兼顾了local和global信息。

网络的loss层
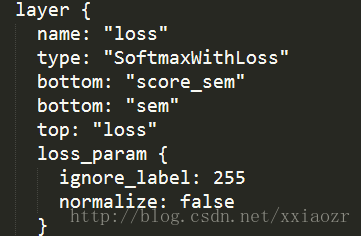
sem是网络输入层的top:’sem’ 是数据的标签
fcn网络的输入batchsize是1,因为分割loss的计算在每一个像素点都一个真值(标签),相当于每一个像素点的都是一个分类任务,一个图像就有对应像素点个样本。所以分割任务的batch是一个图片,将一个图片最后在所有像素点上的分类loss加起来计算一次梯度的更新。
训练
训练过程分为四个阶段,也体现了作者的设计思路,值得研究。
第1阶段
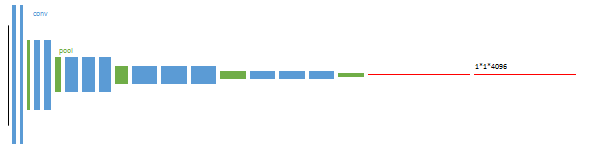
以经典的分类网络为初始化。最后两级是全连接(红色),参数弃去不用。
第2阶段
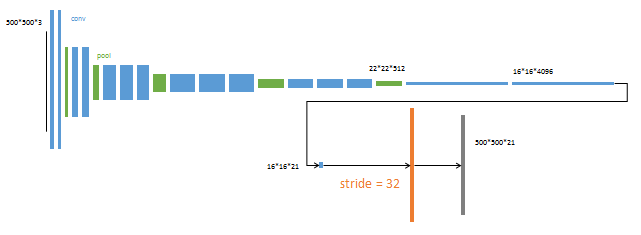
从特征小图(16*16*4096)预测分割小图(16*16*21),之后直接升采样为大图。
反卷积(橙色)的步长为32,这个网络称为FCN-32s。
这一阶段使用单GPU训练约需3天。
第3阶段
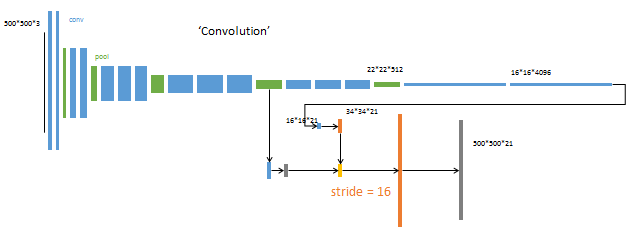
升采样分为两次完成(橙色×2)。
在第二次升采样前,把第4个pooling层(绿色)的预测结果(蓝色)融合进来。使用跳级结构提升精确性。
第二次反卷积步长为16,这个网络称为FCN-16s。
这一阶段使用单GPU训练约需1天。
第4阶段
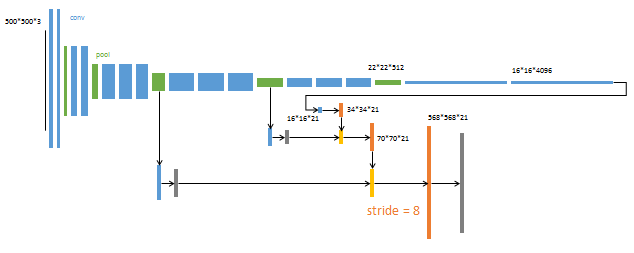
升采样分为三次完成(橙色×3)。
进一步融合了第3个pooling层的预测结果。
第三次反卷积步长为8,记为FCN-8s。
这一阶段使用单GPU训练约需1天。
较浅层的预测结果包含了更多细节信息。比较2,3,4阶段可以看出,跳级结构利用浅层信息辅助逐步升采样,有更精细的结果。 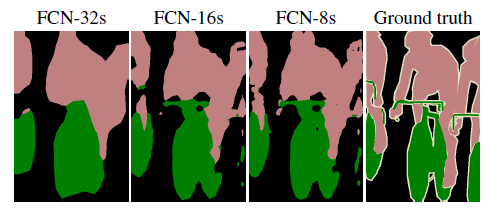
其他参数
minibatch:20张图片
learning rate:0.001
初始化:
分类网络之外的卷积层参数初始化为0。
反卷积参数初始化为bilinear插值。最后一层反卷积固定位bilinear插值不做学习。
结论
总体来说,本文的逻辑如下:
- 想要精确预测每个像素的分割结果
- 必须经历从大到小,再从小到大的两个过程
- 在升采样过程中,分阶段增大比一步到位效果更好
- 在升采样的每个阶段,使用降采样对应层的特征进行辅助
后续的一个发展:
采用条件随机场建立类别的关系。
举个简单的例子,"天空"和"鸟"这样的像素在物理空间是相邻的概率,应该要比"天空"和"鱼"这样像素相邻的概率大,那么天空的边缘就更应该判断为鸟而不是鱼(从概率的角度)。https://blog.csdn.net/DL_CreepingBird/article/details/78574059
参考博客:https://blog.csdn.net/xxiaozr/article/details/74159614
配置caffe运行FCN:http://melonteam.com/posts/quan_juan_ji_shen_jing_wang_luo_fcn_xue_xi_bi_ji/
我觉得思路最清晰的一个博主:https://blog.csdn.net/qq_37274615/article/details/73251503