Detect-and-Track论文:3D Mask R-CNN Caffe2源代码解析——4. 网络头解析
在第三部分,我们对3D Mask R-CNN的RPN和FPN进行了详解,在特征图经过RoIAlign过程之后,我们得到了Resize后的特征图。下一步就是将这些维度相同的特征图送入“网络头/Net Head”部分进行最终处理。这篇文章我们就一起探究以下这两个网络头:Cls_Head和Key_Head。
参考内容链接如下:
Detect-and-Track论文:【网页链接】
Detect-and-Track源代码:【网页链接】
Fast R-CNN论文:【网页链接】
目录
一、框架详解
二、Fast R-CNN回顾
三、Net_Head代码详解
1. Fast R-CNN网络头
1) add_roi_frcn_head_func()
2)add_fast_rcnn_outputs()
2. Mask分支
3.关键点支路
1) add_roi_keypoint_head_func()
2) add_heatmap_outputs()
四、一些感想
一、框架详解
上图中HighLight出来的部分就是网络头。网络头由一对姊妹支流构成:Fast R-CNN Head(又简称Cls_Head)和Key Point_Head,两路支路功能如下:
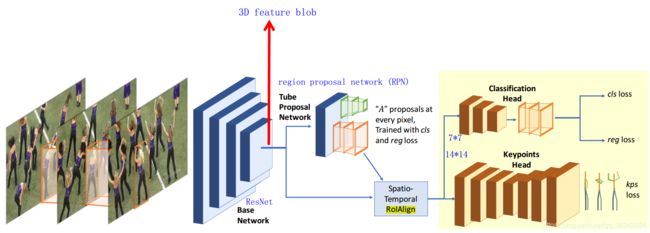
- Fast R-CNN Head:之所以这样起名是因为这个结构初创于Fast R-CNN,其中cls用于确定目标类别,reg是对RoI进行Bounding Box回归。其中的cls使用softmax损失值,reg使用L1损失值。
- Key Point Head:这个分支用于生成人体关键点。所采用的方法是:先使用8层卷积将RoI变小,之后使用两层DeConv层得到Heatmap。这一层使用的是空间softmax损失值。
二、Fast R-CNN回顾
论文网址已经贴在上边了,具体的内容用一张核心的图就可以表示出来:

好了,这个部分我们主要还是了解一下Fast R-CNN的作者:Ross Girshick。免得以后人家再出了大文章我们不认识。首先来看一下Fast R-CNN的题目:

够霸气吧……一个人独立完成了RCNN向Fast R-CNN的进化。Ross Girshick的个人主页在这里:http://www.rossgirshick.info/ ,2012年芝加哥大学博士毕业,先后在Microsoft Research和FAIR工作,后来又去U.C. Berkeley做博士后。在这里膜拜一下大佬,希望大佬保佑我早日毕业!

三、Net_Head代码详解
model_builder()一直都是Key Point R-CNN构建的核心函数,上节分析到了RPN和FPN,现在继续。我们到了这一段。三个星星将三段程序完美地隔开:第一段程序是添加Fast R-CNN头;第二段程序是生成Mask;第三段程序是生成关键点。我们依次分开来看。
1. Fast R-CNN网络头
# ★ Add the Fast R-CNN branch(生成cls和reg)
blob_frcn, dim_frcn, spatial_scale_frcn = add_roi_frcn_head_func(model, blob_conv, dim_conv, spatial_scale_conv)
# ResNet3D.add_ResNet18_roi_conv5_head
add_fast_rcnn_outputs(model, blob_frcn, dim_frcn, is_head_3d=head_3d)
首先由add_roi_frcn_head_func()添加网络头,生成的参数都在最后添加了frcn。之后用add_fast_rcnn_outputs()直接生成了cls和reg结果。我们分开来看:
1) add_roi_frcn_head_func()
实质是ResNet3D.add_ResNet18_roi_conv5_head,定位到此函数:
def add_ResNet18_roi_conv5_head(*args, **kwargs):
""" Usable with R18/34 models. """
kwargs['dim_out'] = 512 # 修改输出维度为512
kwargs['block_counts'] = 2 # 含有2个bottleneck block
return add_ResNet_roi_conv5_head(*args, **kwargs)
核心程序是add_ResNet_roi_conv5_head()函数,再定位到此函数。可以发现,首先对输入的张量使用RoIFeatureTransform()进行了RoIAlign变换,应该是变换成为7*7的小特征图。之后通过了两个bottleneck blocks,最后通过维度扩展得到了3*4的张量。
def add_ResNet_roi_conv5_head(model, blob_in, dim_in, spatial_scale, block_counts=3, dim_out=2048):
"""Adds an RoI feature transformation (e.g., RoI pooling) followed by a res5/conv5 head applied to each RoI."""
# TODO(rbg): This contains Fast R-CNN specific config options making it non-
# reusable; make this more generic with model-specific wrappers
# 进行RoI特征变换
model.RoIFeatureTransform(
blob_in, 'pool5',
blob_rois='rois',
method=cfg.FAST_RCNN.ROI_XFORM_METHOD, # RoIAlign
resolution=cfg.FAST_RCNN.ROI_XFORM_RESOLUTION, # 分辨率:7
sampling_ratio=cfg.FAST_RCNN.ROI_XFORM_SAMPLING_RATIO, # 采样率:2
spatial_scale=spatial_scale)
dim_bottleneck = cfg.RESNETS.NUM_GROUPS * cfg.RESNETS.WIDTH_PER_GROUP # 1*64
stride_init = int(cfg.FAST_RCNN.ROI_XFORM_RESOLUTION / 7) # 步长
# 添加2个bottleneck blocks
s, dim_in = add_stage(4, model, 'res5', 'pool5', block_counts, dim_in, dim_out, dim_bottleneck * 8, 1, stride_init)
# Reduce mean across all dimensions (h,w,t)
model.ReduceBackMean(s, 'res5_pool_w')
model.ReduceBackMean('res5_pool_w', 'res5_pool')
# Do not pool on time as well, as I use a 3D head on top, so leave it as a
# 3D blob so I can do 3D conv on it.
# s = model.ReduceBackMean('res5_pool', 'res5_pool')
s = model.ExpandDims('res5_pool', 'res5_pool', dims=[3, 4]) # 扩展为3*4的,与3帧图像有关
return s, dim_out, spatial_scale
2)add_fast_rcnn_outputs()
作用是生成分类结果和回归结果。cls_score由一次卷积直接得出;final_shape由一次卷积和多次Resize得出。如果不是3D模式,则使用全连接层。
def add_fast_rcnn_outputs(model, blob_in, dim, is_head_3d):
# 将3D张量卷积为2D
if is_head_3d:
# As per the changes to ResNet head, the output will be a 3D blob
# so that I can run 3D convolutions on it. But be careful to output a 2D
# blob from here
cls_score = model.ConvNd( # 进行卷积
blob_in, 'cls_score_1', dim, model.num_classes,
[1, 1, 1], pads=2 * [0, 0, 0], strides=[1, 1, 1],
weight_init=('GaussianFill', {'std': 0.01}),
bias_init=('ConstantFill', {'value': 0.}))
# Does not support inplace operations! WOW
model.ReduceBackMean(model.ReduceBackMean(model.ReduceBackMean(
cls_score, 'cls_score_2'), 'cls_score_3'), 'cls_score')
# 如果不是3D模式,就用全连接层
else:
# Original code
model.FC(
blob_in, 'cls_score', dim, model.num_classes,
weight_init=('GaussianFill', {'std': 0.01}),
bias_init=('ConstantFill', {'value': 0.}))
# 只有测试的时候才用softmax
if not model.train: # == if test
# Only add softmax when testing; during training the softmax is combined
# with the label cross entropy loss for numerical stability
model.Softmax('cls_score', 'cls_prob', engine='CUDNN')
if is_head_3d:
model.ConvNd(
blob_in, 'bbox_pred_1', dim,
4 * model.num_classes, [1, 1, 1], # 4倍个种类
pads=2 * [0, 0, 0], strides=[1, 1, 1],
weight_init=('GaussianFill', {'std': 0.01}),
bias_init=('ConstantFill', {'value': 0.}))
# 接下来是一系列的张量操作,不停地调整维度
# Convert into the format bbox losses expect (Same as RPN)
# Convert the Bx(4C)xTxHxW -> BxCx4xTxHxW
model.ExpandDims('bbox_pred_1', 'bbox_pred_2', dims=[2]) # 扩展一个维度
model.Reshape(['bbox_pred_2'], ['bbox_pred_3', model.net.NextName()], # 自动填充这个维度
shape=(0, -1, 4, 0, 0, 0))
# Convert the BxCx4xTxHxW -> BxCxTx4xHxW
model.Transpose('bbox_pred_3', 'bbox_pred_4', # 重新调整维度次序
axes=(0, 1, 3, 2, 4, 5))
# Convert the BxCxTx4xHxW -> Bx(C*T*4)xHxW
batch_size = model.GetShapeDimIdx(blob_in, 0)
ht = model.GetShapeDimIdx(blob_in, 3)
wd = model.GetShapeDimIdx(blob_in, 4)
final_shape = model.GetNewShape(batch_size, -1, ht, wd)
model.Reshape(['bbox_pred_4', final_shape],
['bbox_pred_5', model.net.NextName()])
# Does not support inplace operations! WOW
model.ReduceBackMean(model.ReduceBackMean('bbox_pred_5', 'bbox_pred_6'), 'bbox_pred')
else:
model.FC(
blob_in, 'bbox_pred', dim, model.num_classes * 4,
weight_init=('GaussianFill', {'std': 0.001}),
bias_init=('ConstantFill', {'value': 0.}))
2. Mask分支
这个框架没有使用到Mask,仅仅只是预测关键点。
# ★ Add the mask branch(生成Mask),但是在KeyPoint R-CNN中没有使用到Mask
if cfg.MODEL.MASK_ON:
if is_inference:
bbox_net = copy.deepcopy(model.net.Proto())
# Add the mask branch
blob_mrcn, dim_mrcn, _ = add_roi_mask_head_func(model, blob_conv, dim_conv, spatial_scale_conv)
blob_mask = add_mask_rcnn_outputs(model, blob_mrcn, dim_mrcn)
if is_inference:
# Extract the mask prediction net, store it as its own network,
# then restore the primary net to the bbox-only network
model.mask_net, blob_mask = get_suffix_net(
'mask_net', bbox_net.op, model.net, [blob_mask])
model.net._net = bbox_net
3.关键点支路
此支路用于生成HeatMap关键点。
# ★ Add the keypoint branch(关键点支路)
if cfg.MODEL.KEYPOINTS_ON:
if is_inference: # 测试模式
bbox_net = copy.deepcopy(model.net.Proto())
# RoIAlign操作和8层3D卷积
blob_krcnn, dim_krcnn, _ = add_roi_keypoint_head_func( # keypoint_rcnn_heads.add_roi_pose_head_v1convX_3d
model, blob_conv, dim_conv, spatial_scale_conv)
# 生成热图
blob_keypoint = add_heatmap_outputs(
model, blob_krcnn, dim_krcnn, time_dim=out_time_dim, is_head_3d=head_3d)
if is_inference:
model.keypoint_net, keypoint_blob_out = get_suffix_net(
'keypoint_net', bbox_net.op, model.net, [blob_keypoint])
model.net._net = bbox_net
1) add_roi_keypoint_head_func()
此函数通过add_roi_pose_head_v1convX()函数进行链接,内容是完成8层Conv的添加。
def add_roi_pose_head_v1convX(model, blob_in, dim_in, spatial_scale, nd=False):
# 先经过RoIAlign,再通过8层3D卷积
hidden_dim = cfg.KRCNN.CONV_HEAD_DIM # 512
kernel_size = cfg.KRCNN.CONV_HEAD_KERNEL
pad_size = kernel_size // 2
current = model.RoIFeatureTransform(
blob_in, '_[pose]_roi_feat',
blob_rois='keypoint_rois',
method=cfg.KRCNN.ROI_XFORM_METHOD, # RoIAlign
resolution=cfg.KRCNN.ROI_XFORM_RESOLUTION, # 14
sampling_ratio=cfg.KRCNN.ROI_XFORM_SAMPLING_RATIO, # 2
spatial_scale=spatial_scale)
for i in range(cfg.KRCNN.NUM_STACKED_CONVS): # 8
if nd: # 执行N维卷积
current = model.ConvNd(
current, 'conv_fcn' + str(i + 1), dim_in, hidden_dim,
[cfg.VIDEO.TIME_KERNEL_DIM.HEAD_KPS, kernel_size, kernel_size],
pads=2 * [cfg.VIDEO.TIME_KERNEL_DIM.HEAD_KPS // 2, pad_size, pad_size],
strides=[1, 1, 1],
weight_init=(cfg.KRCNN.CONV_INIT, {'std': 0.01}),
bias_init=('ConstantFill', {'value': 0.}))
else:
current = model.Conv(
current, 'conv_fcn' + str(i + 1), dim_in, hidden_dim,
kernel_size, stride=1, pad=pad_size,
weight_init=(cfg.KRCNN.CONV_INIT, {'std': 0.01}),
bias_init=('ConstantFill', {'value': 0.}))
current = model.Relu(current, current)
dim_in = hidden_dim
return current, hidden_dim, spatial_scale
2) add_heatmap_outputs()
按照配置文件添加解卷积层,生成heatmap。这个程序实在是太长了我就不放了。。。
四、一些感想
都说caffe代码比较“乱”,个人感觉的确是有一点,因为找函数要不停地跳。其实现在看代码只到了比较宏观的程度,还没有具体到代码的细节,如每个张量的维度、每个操作的函数。还是有很长的路要走啊。
今天公司里新到了DGX工作站,价格是50万,操作界面都是命令行,看来要彻底抛弃Ubuntu界面了。加油,早日跑起D&T来!

