基于Arduino的智能蓝牙小车
材料准备:
Arduino开发板一块、四驱小车底板及相关配件一套、L298N驱动模块一个、HC-05/06蓝牙模块一块,九伏电源一块(用于主板供电)、12V锂电池一块(带充电器,供驱动器电源)。
L298N使用方法
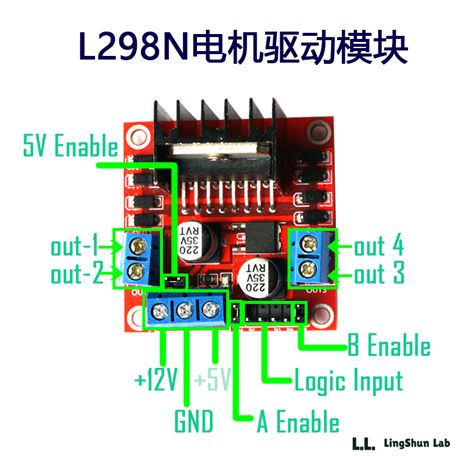
如图所示,外接一个12V电源,将Logic Input上四个输入口分别接到控制板对应位置。(外接12V电源,还需从GND处接一根电源至控制板)
HC-05/06 蓝牙模块
HC-06 Arduino UNO
VCC VCC
GND GND
TXD RXD
RXD TXD
代码如下
#define IN1 5 // 定义开发板5口为IN1(L298N驱动器)
#define IN2 6 //定义开发板6口为IN1(L298N驱动器)
#define IN3 9 //定义开发板9口为IN1(L298N驱动器)
#define IN4 10 //定义开发板10口为IN1(L298N驱动器)
#include
SoftwareSerial BT(3,4); // 定义开发板3,4为RX,TX
char val; //定义参数接收蓝牙的值
#define LEFT '3' //左转编码
#define RIGHT '4' //右转编码
#define GO '1' //前进编码
#define BACK '2' //后退编码
#define STOP '0' //停止编码
void setup() {
BT.begin(9600); //蓝牙波率设置为9600
Serial.begin(9600); //设置串口波特率
pinMode(IN1,OUTPUT); //设置为输出口
pinMode(IN2,OUTPUT); //设置为输出口
pinMode(IN3,OUTPUT); //设置为输出口
pinMode(IN4,OUTPUT); //设置为输出口
initCar(); //调用,停车,下文有
}
//开始判断是否接收数据,数据为多少
void loop() {
if(BT.available()){
val=BT.read();
if(val == GO){
//前进
go();
}else if(val == BACK){
//后退
back();
}else if(val == LEFT){
//左转
turnLeft();
}else if(val == RIGHT){
//右转
turnRight();
}else if(val=='0'){
//停车
stopCar();
}
}
}
void initCar(){
//默认全是低电平 停止状态
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnLeft(){
//左转
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //右轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //左轮不动
}
void turnRight(){
//右转
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //右轮不动
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //左轮前进
}
void go(){
//前进
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //右轮前进
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //左轮前进
}
void back(){
//倒车
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //右轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //左轮后退
}
void stopCar(){
//停车
initCar();
}
接线如下:
Arduino UNO 蓝牙HC-05/06
5V VCC
GND GND
PWM 3 RXD
PWM4 GND
L298N
PWM5 IN1
PWM6 IN2
PWM9 IN3
PWM10 IN4
GND GND
L298N 电源
+12V 电源正
GND 电源负