万向节死锁的根本问题是欧拉角(EulerAngles)保存的信息不足以描述空间中的唯一转向,四元数(Quaternion)是可以的。
关于万向节死锁的产生原因,网上有非常多的文章解释,这里不做过多阐述。
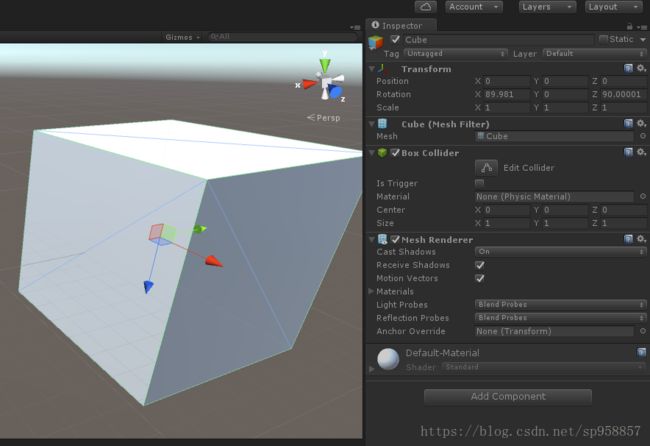
举个简单的例子,如果在Unity中设置一个物件(target)的Transform的Rotation的localEulerAngles为(90f, 180f,-90f),即下面的代码:
target.localEulerAngles = new Vector3(90f, 180f,-90f);
此时:
- 此时获取target.localEulerAngles的值为(90,270,0)
- 此时获取target的Inspector面板值为(90,0,90)
一个物件的3D空间可以用三种不同的值来表述。真是个灾难。
问题的产生
项目中有个需求,需要实现一个类似Unity编辑器中Transform控制面板的功能,当拖动面板值时,能连续变换,并且能保存和恢复数据。效果如下:
原始程序
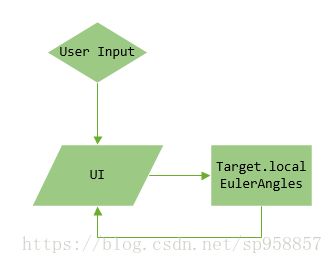
用户输入后,直接读取面板值v1(Vector3),设置到target的localEulerAngles中;UI面板的值则实时从target.localEulerAngles获取数据展示。
这种情况会出现一种bug,先用代码重现下:
- 首先设置在Start中设置初始转向为
Vector3(0, 0, 90) - Update中模拟用户拖拽x轴,增长x值
private void Start()
{
target.localEulerAngles = new Vector3(0, 0, 90);
}
private void Update()
{
StartCoroutine(ChangeRotation());
}
private IEnumerator ChangeRotation()
{
yield return new WaitForSeconds(0.1f);
var original = target.localEulerAngles;
original.x += 0.1f;
target.localEulerAngles = original;
}
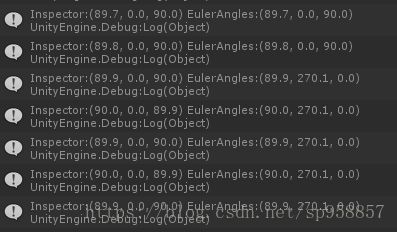
运行之后,当x值增长到90°时,就“卡”住不动了
查看Console值,当输入值增长到90附近时,target.localEulerAngles发生了剧烈变化,导致值在死循环,所以就卡住了
改进程序A
private Vector3 start = new Vector3(0, 0, 90);//假设为数据恢复后的值
private IEnumerator ChangeRotation2()
{
yield return new WaitForSeconds(0.01f);
start.x += 0.1f;
target.localEulerAngles = start;
}
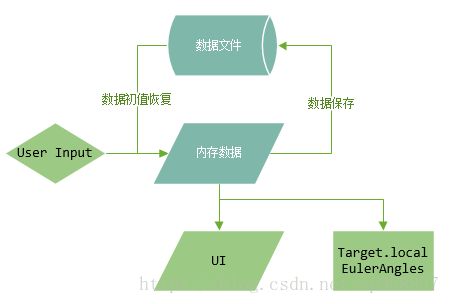
将用户输入的UI数据与target.localEulerAngles变成单向关联,数据恢复后的值直接显示到UI上,用户更改的值(同样也是UI显示的值)用于存储,并作用于target.localEulerAngles。
结果如下
卡死的问题虽然结局了,但是存储的值是Vector3类型的欧拉角,也就意味着这种情况的死锁问题解决了,今后可能会遇到其他情况的死锁问题。
例如而且这里可以发现,start的x值在无限增长,而Inspector面板中的值有个[-180,180]的区间(这里是因为调快了步进值,所以看上去只有175)
改进程序B
首先要明确的一点就是需要把描述转向的四元数存储下来,其次要解决Inspector面板中的值在[-180,180]的区间的问题。
那么我们首先观察下Unity本身Inspector是怎么表现的。
可以看到在x值是可以无限增长的。
那么我们的程序可以这样设计:借助UnityEngine的Inspector来实现同样的功能。
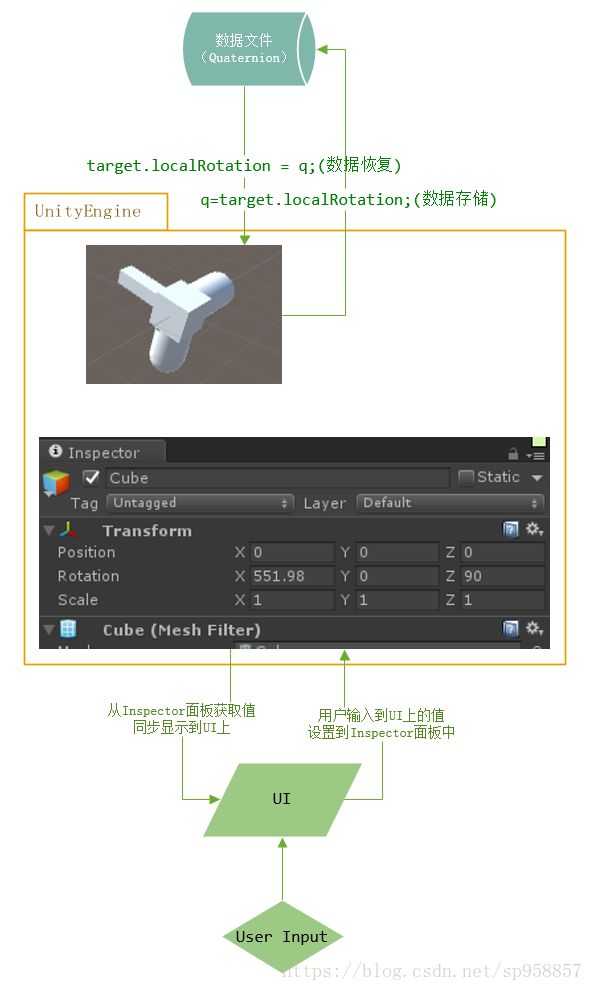
- 1、存储的Unity Transform的localRotation值(Quaternion),恢复的时候,直接调用
target.localRotation = q; - 2、UI显示的时候,直接从Inspector面板获取该值显示。
- 3、用户输入的时候,直接“设置到Inspector面板中”让UnityEngine为我们解决其中的死锁以及显示问题。
程序如下
private IEnumerator ChangeRotation3()
{
yield return new WaitForSeconds(1f);
var original = ShowRotationLikeInspector(target);
original.x += 0.1f;
SetRotationLikeInspector(target, original);
}
那么这个方案最大的问题是如何实现2和3步骤,查看Unity 2018.1.0b12源码可以发现这样的代码
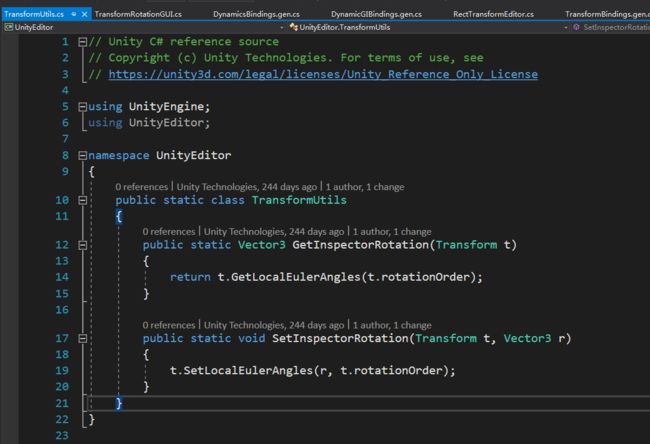
这正是我们需要的代码,可惜的是在5.x版本中并没有这样的接口。好在这2个方法的底层方法都是有的,只不过是internal,那么只需要使用反射,就可以实现这样的方法,代码如下
public Vector3 ShowRotationLikeInspector(Transform t)
{
var type = t.GetType();
var mi = type.GetMethod("GetLocalEulerAngles", BindingFlags.NonPublic | BindingFlags.Public | BindingFlags.Instance);
var rotationOrderPro = type.GetProperty("rotationOrder", BindingFlags.NonPublic | BindingFlags.Public | BindingFlags.Instance);
var rotationOrder = rotationOrderPro.GetValue(t, null);
var EulerAnglesInspector = mi.Invoke(t, new[] {rotationOrder});
return (Vector3) EulerAnglesInspector;
}
public void SetRotationLikeInspector(Transform t, Vector3 v)
{
var type = t.GetType();
var mi = type.GetMethod("SetLocalEulerAngles", BindingFlags.NonPublic | BindingFlags.Public | BindingFlags.Instance);
var rotationOrderPro = type.GetProperty("rotationOrder", BindingFlags.NonPublic | BindingFlags.Public | BindingFlags.Instance);
var rotationOrder = rotationOrderPro.GetValue(t, null);
mi.Invoke(t, new[] {v, rotationOrder});
}
最终运行起来,效果如下,这里借助Unity的内部机制,取巧地解决了万向节死锁(gimbal lock)的问题