本文:http://blog.csdn.net/u011239443/article/details/73008131
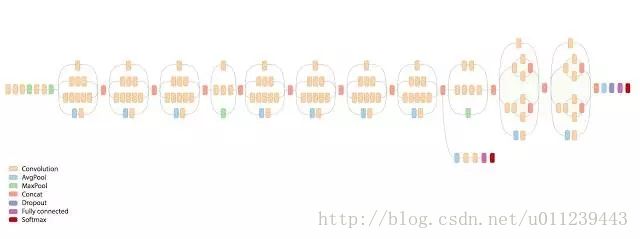
这里写图片描述
我们之前介绍的神经网络层与层之间都是一对一的,而
Inception-v3模型存在一对多和多对一。
- 一对多:用不同或者相同的过滤器过滤出多个层
- 多对一:将多层合并,即深度会相加。
tensorflow github 中有Inception-v3模型的实现:https://github.com/tensorflow/tensorflow/blob/fc1567c78b3746b44aa50373489a767afbb95d2b/tensorflow/contrib/slim/python/slim/nets/inception_v3.py
由于大部分代码雷同,所以我们就讲解最后一个Mixed的代码:
这里写图片描述
首先我们来介绍下一个可以来帮我们创建卷积神经网络层的工具:layers.conv2d。它可以很简洁的帮我们创建卷积神经网络卷积层,它本质是convolution函数,我们可以看下convolution函数:
def convolution(inputs,
num_outputs,
kernel_size,
stride=1,
padding='SAME',
data_format=None,
rate=1,
activation_fn=nn.relu,
normalizer_fn=None,
normalizer_params=None,
weights_initializer=initializers.xavier_initializer(),
weights_regularizer=None,
biases_initializer=init_ops.zeros_initializer(),
biases_regularizer=None,
reuse=None,
variables_collections=None,
outputs_collections=None,
trainable=True,
scope=None):
"""
Args:
inputs: a Tensor of rank N+2 of shape
`[batch_size] + input_spatial_shape + [in_channels]` if data_format does
not start with "NC" (default), or
`[batch_size, in_channels] + input_spatial_shape` if data_format starts
with "NC".
num_outputs: integer, the number of output filters.
kernel_size: a sequence of N positive integers specifying the spatial
dimensions of of the filters. Can be a single integer to specify the same
value for all spatial dimensions.
stride: a sequence of N positive integers specifying the stride at which to
......
scope: Optional scope for `variable_scope`.
'''
我们可以看到参数:
- inputs:输入数据
- num_outputs:输出深度
- kernel_size:窗口尺寸
- stride=1:步长,默认为1
- padding='SAME':是否填充0,默认填充
接下来我们来看下这部分的代码:
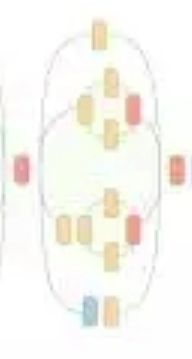
- Branch_0:
这里写图片描述
从net,用深度为320,1×1的过滤器,过滤出branch_0。
end_point = 'Mixed_7b'
with variable_scope.variable_scope(end_point):
with variable_scope.variable_scope('Branch_0'):
branch_0 = layers.conv2d(
net, depth(320), [1, 1], scope='Conv2d_0a_1x1')
- Branch_1:

这里写图片描述
先从net,用深度为384,1×1的过滤器,过滤出branch_1。
再从branch_1,分别用一个深度为384,1×3的过滤器和深度为384,3×1的过滤器,过滤出两层。
最后,将这两层合并,赋值给branch_1,concat中参数3,代表在是在第三个维度,即深度上,对两者进行合并。
with variable_scope.variable_scope('Branch_1'):
branch_1 = layers.conv2d(
net, depth(384), [1, 1], scope='Conv2d_0a_1x1')
branch_1 = array_ops.concat(
[
layers.conv2d(
branch_1, depth(384), [1, 3], scope='Conv2d_0b_1x3'),
layers.conv2d(
branch_1, depth(384), [3, 1], scope='Conv2d_0b_3x1')
],
3)
- Branch_2 & Branch_3

这里写图片描述
前面两个操作类似,可以参考图片自己理解代码:
with variable_scope.variable_scope('Branch_2'):
branch_2 = layers.conv2d(
net, depth(448), [1, 1], scope='Conv2d_0a_1x1')
branch_2 = layers.conv2d(
branch_2, depth(384), [3, 3], scope='Conv2d_0b_3x3')
branch_2 = array_ops.concat(
[
layers.conv2d(
branch_2, depth(384), [1, 3], scope='Conv2d_0c_1x3'),
layers.conv2d(
branch_2, depth(384), [3, 1], scope='Conv2d_0d_3x1')
],
3)
with variable_scope.variable_scope('Branch_3'):
branch_3 = layers_lib.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = layers.conv2d(
branch_3, depth(192), [1, 1], scope='Conv2d_0b_1x1')
最后,将branch_0, branch_1, branch_2, branch_3进行合并:
net = array_ops.concat([branch_0, branch_1, branch_2, branch_3], 3)
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points

这里写图片描述