原文博客链接
用过 iOS 的都知道,拟物理的回弹效果在上面非常普遍,因为这是 iOS 系统支持的一套 UI 框架,但是 Android 就没有了,就拿图片查看器来讲,iOS 的效果就是感觉一张图片被绑定在了弹簧装置上,滑动很自然,Android 没有自带的图片查看器,需要自己实现
市面上主流的图片查看器都没有回弹的效果,一部分原因是没有这个需求,还有一部分是实现麻烦,这里讲述一个个人认为最好的方案
需求
一个图片查看器,要求可以滑动 Fling,触碰到边界的时候回弹,有越界回弹的效果,支持双指缩放,双击缩放
分析
咋一看需求,应该好写,滚动的时候用 Scroller 来解决,回弹效果直接用 ValueAnimator,设置插值器为减速插值器来解决。看似简单,但是因为是仿物理效果,中间牵扯到从滚动到回弹的时候(Scroller动画切换到ValueAnimator动画)的速度衔接问题,要看上去从滚动到开始回弹至结束没有突兀,中间的特判边界处理是很麻烦的,还要牵扯到缩放,所以不考虑这种方案
既然是要模拟现实中的物理效果,为何不在每一帧根据当前的状态得到对用的加速度,然后去计算下一帧的状态位置,这样只要模拟现实中的物理加速度不就可以实现了吗,那些边界特判之类的就可以去见阎王了
方案确定完毕,接下来就是选定加速度的方程,要模拟弹簧的效果,拉力很简单,用胡克定律嘛!F = k * dx,摩擦力呢?Ff = μ*FN ? 这里推荐一个更加好的方案,借鉴自 Rebound 库,这是 Facebook 的一个弹簧动画库,设定一个目的数值,它会根据当前的拉力,摩擦力,速度然后变化到目标值,加速度方程为
a=tension·dx - friction·v
其中 tension 为弹性系数,friction为摩擦力系数,为什么让摩擦力和速度成正比呢?如果摩擦力和速度成正比,那么就不存在静摩擦力,也就是不存在物体静止情况下拉力小于摩擦力的情况(因为速度为0的时候,阻力为0,除非拉力为0),物体肯定会向目标地点靠近,遏制了物体摩擦力过大而无法达到目的地情况
类的设计
为了方便接入各种 View ,设计一个 ZoomableGestureHelper 类
public static class ZoomableGestureHelper{
// 因为可以缩放,平移,用矩阵来表示结果最好
public Matrix getZoomMatrix();
/**
* 计算下一帧的位置,dt单位为秒,模拟现实物理
*/
public boolean compute(double dt);
/**
* 获取到外部容器的范围
* @return
*/
public abstract Rect getBounds(Rect rect);
/**
* 内部滚动视图的范围
* @return
*/
public abstract Rect getInnerBounds(Rect rect);
}
设计目的,我只需要知道视图的大小边界 (bounds) 和内部可滚动回弹的边界 (innerBounds),就可以通过计算得到一个新的转换矩阵
对于物理状态,需要一个类 SpringPhysicsState 来做存储,里面包含了速度、拉力系数、摩擦力系数,不保存位置,因为位置是通过 getBounds 动态计算得到的
public class SpringPhysicsState {
// 速度
private double velocity;
// 拉力弹性系数
private double tension;
// 摩擦力系数
private double friction;
// ---------- 构造函数 ----------
/**
* 默认数值 tension = 40, friction = 12;
*/
public SpringPhysicsState(){
init(40, 12);
}
public SpringPhysicsState(double tension, double friction){
init(tension, friction);
}
public double computeNextPosition(double startPosition, double endPosition, double dt){
// 此处省略计算代码,后面会补充
}
// ---------- setter and getter -----------
public double getVelocity() {
return velocity;
}
public void setVelocity(double velocity) {
this.velocity = velocity;
}
public double getTension() {
return tension;
}
public void setTension(double tension) {
this.tension = tension;
}
public double getFriction() {
return friction;
}
public void setFriction(double friction) {
this.friction = friction;
}
// ------------------ 私有函数 -------------------
private void init(double tension, double friction){
this.velocity = 0;
this.friction = friction;
this.tension = tension;
}
}
移动的处理
速度分解成水平方向和垂直方向,因为处理方法一样,下面只讲述垂直方向的计算
public boolean compute(double realDeltaTime){
...
// 更新 bounds 信息, bounds 为 Rect 类型
getBounds(bounds);
getInnerBounds(innerBounds);
/**
* 以下移动的计算
*/
double xPosition = 0, xEndPosition = 0;
double yPosition = 0, yEndPosition = 0;
// 设置摩擦力系数
xPhysicsState.setFriction(FRICTION * getDensity());
yPhysicsState.setFriction(FRICTION * getDensity());
// 计算x轴方向
...
// 计算y轴方向
if (getHeight(bounds) > getHeight(innerBounds)){
// 状态3 (见下面解析)
yPosition = (innerBounds.bottom + innerBounds.top) / 2.0f;
yEndPosition = (bounds.top + bounds.bottom) / 2.0f;
} else {
if (innerBounds.top > bounds.top){
// 状态1
yPosition = innerBounds.top;
yEndPosition = bounds.top;
} else if (innerBounds.bottom < bounds.bottom){
// 状态1
yPosition = innerBounds.bottom;
yEndPosition = bounds.bottom;
} else {
// 状态2,滑动fling状态,需要更换摩擦力系数
yPhysicsState.setFriction(FLING_FRICTION * getDensity());
}
}
double newYPosition = yPosition;
yPhysicsState.computeNextPosition(newYPosition, yEndPosition, SOLVER_TIMESTEP_SEC);
// 移动
zooomMatrix.postTranslate((float) (newXPosition - xPosition), (float) (newYPosition - yPosition));
// 返回false不会表示结束计算,不会有下次计算了
// sgn 函数 (x) => (x > EPS ? 1 : 0) - (x < -EPS ? 1 : 0)
// EPS = 1e-4;
return sgn(newYPosition - yEndPosition) != 0 || sgn(yPhysicsState.getVelocity()) != 0;
}
红色框为视图的区域,蓝色框为内部图片的区域,帧计算触发时机使用
View的computeScroll方法,这里会牵扯到停止判定,之后会讲述
状态1 :其中一边有越界
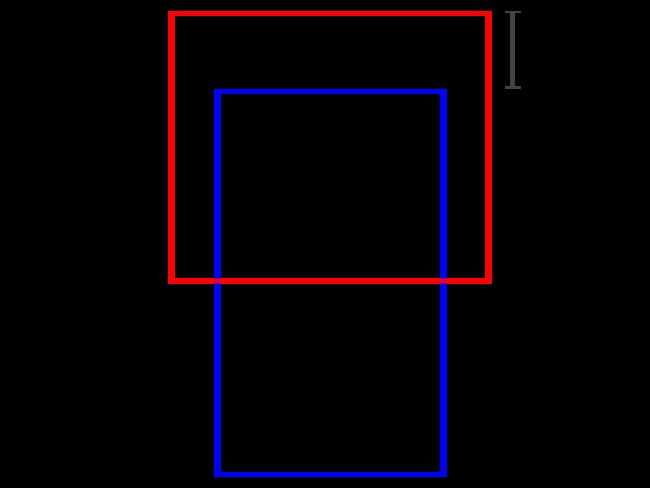
分析一下上图中的位置,蓝色部分为内部图片,它被拖动越界了,此时的合力应该为 tension * dx - friction * v, v为图片在 y 轴方向上的速度,(dx 和 v 都是矢量,我暂且设置向右和向下为正),之后就直接调用invalidate();,就可以播放动画了。
状态2:两边都没越界
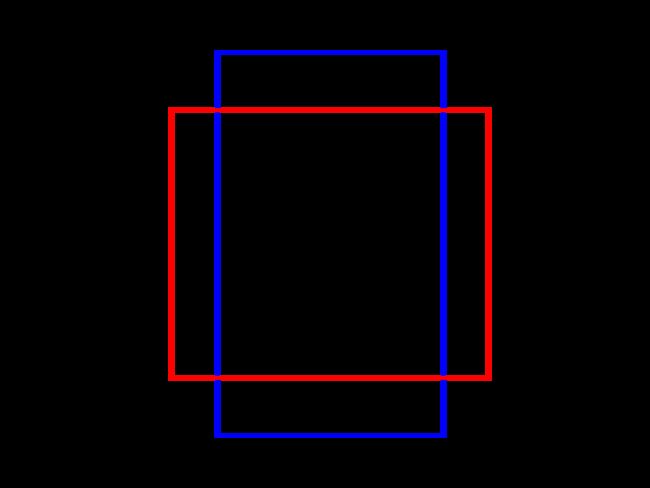
此时因为两边都没有越界,所以应该不存在拉力,可以认为此时dx为0,摩擦力需要注意下,因为可以支持滑动(Fling),所以此时的摩擦力要比之前越界回弹时候的摩擦力小,至于具体数值,文末会给出
状态3:两边都超出
此时两边都超出边界,蓝色区域应该和红色区域中心绑定,所以此时的 dx为 dxBottom - dxTop(注意符号,因为dx为矢量,所以不能是dxTop - dxBottom)
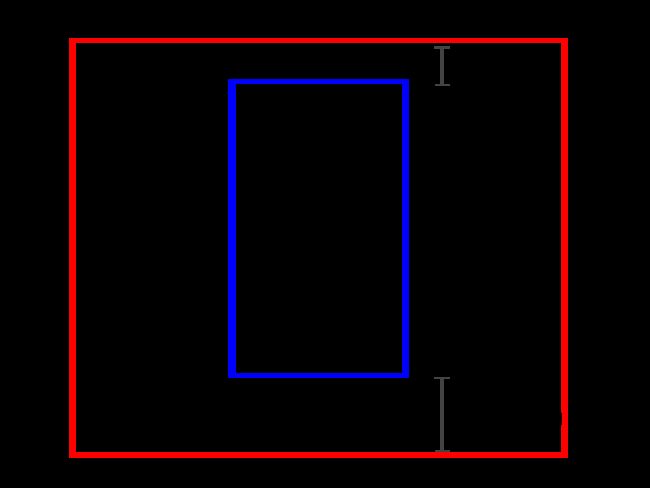
缩放的处理
public boolean compute(double realDeltaTime){
/**
* 以下缩放的计算
*/
double scale = Math.max(getWidth(innerBounds) * 1.0 / getWidth(bounds), getHeight(innerBounds) * 1.0 / getHeight(bounds));
double endScale = 1, startScale = scale;
if(scale >= 1){
// 此时表示不需要自动适应,把dx改为0
endScale = scale;
}
// 计算下一帧的缩放值
scale = scalePhysicsState.computeNextPosition(scale, endScale, SOLVER_TIMESTEP_SEC);
if(sgn(scale) != 0) {
// x, y 为缩放中心
double x = autoScale ? autoScaleCenterX : (innerBounds.right + innerBounds.left) / 2.0;
double y = autoScale ? autoScaleCenterY : (innerBounds.bottom + innerBounds.top) / 2.0;
zooomMatrix.postScale((float)(scale / startScale), (float)(scale / startScale),
(float)x, (float)y);
}
return sgn(scale) != 0;
}
缩放的方法和移动一致,设定 tension 和 friction ,边界设定为外面红色的框框,蓝色区域无法某一边充满红色区域的时候,有拉力,否则没拉力,摩擦力一直存在,至于双击放大和放小,只需要在双击的时候给缩放状态设置一个初速度,然后invalidate();,搞定!是不是很简单啊
触发的时间间隔 (dt)
时间这一个参数在计算中是非常重要的,这关系到当前微分状态的数值变化,假如用欧拉方法模拟速度和位置的变化,x' = x + v * dt,v' = v + a * dt,公式可以看出时间决定了动画的快慢,为了接近现实物理时间,这里采用的时间单位为秒(计算机中常用的是毫秒)
确定了单位,还需要控制一下时间间隔的数值范围,我们不能让两次computeScroll的时间间隔过于短或者过于长,这里采用的策略为固定每次计算时候的时间间隔,如果两次 computeScroll 的时间间隔小于此时间间隔,那么保存累计时间间隔,等待下一次 computeScroll,直到大于等于固定的时间间隔,再用 while 循环一步一步的计算
public boolean compute(double realDeltaTime){
double adjustTime = realDeltaTime;
// 如果大于最大给定的间隔,设置成最大
if (adjustTime > MAX_DELTA_TIME_SEC){
adjustTime = MAX_DELTA_TIME_SEC;
}
// 计时
timeAccumulator += adjustTime;
// 分步 while 计算
while(timeAccumulator >= SOLVER_TIMESTEP_SEC){
timeAccumulator -= SOLVER_TIMESTEP_SEC;
newXPosition = xPhysicsState.computeNextPosition(newXPosition, xEndPosition, SOLVER_TIMESTEP_SEC);
newYPosition = yPhysicsState.computeNextPosition(newYPosition, yEndPosition, SOLVER_TIMESTEP_SEC);
}
}
结束判定
结束判定是唯一的一个坑,因为计算机只是在 dt 时间内模拟速度和位移的变化,不是通过微积分计算的,存在误差,比如欧拉方法 x' = x + v * dt 和 v' = v + a * dt计算得到的 x' 和 v' 都是近似数值,把 dt这段时间内的变化看成了匀变速运动
计算机中欧拉方法误差还是大的,可以选择另一种误差小的计算方法,龙格库塔4阶,精度很高
// 四阶龙格库塔
public double computeNextPosition(double startPosition, double endPosition, double dt){
double position;
double tempPosition, tempVelocity;
double aVelocity, aAcceleration;
double bVelocity, bAcceleration;
double cVelocity, cAcceleration;
double dVelocity, dAcceleration;
position = startPosition;
tempPosition = startPosition;
// 龙格库塔 4阶
aVelocity = velocity;
aAcceleration = (tension * (endPosition - tempPosition)) - friction * velocity;
tempPosition = position + aVelocity * dt * 0.5f;
tempVelocity = velocity + aAcceleration * dt * 0.5f;
bVelocity = tempVelocity;
bAcceleration = (tension * (endPosition - tempPosition)) - friction * tempVelocity;
tempPosition = position + bVelocity * dt * 0.5f;
tempVelocity = velocity + bAcceleration * dt * 0.5f;
cVelocity = tempVelocity;
cAcceleration = (tension * (endPosition - tempPosition)) - friction * tempVelocity;
tempPosition = position + cVelocity * dt;
tempVelocity = velocity + cAcceleration * dt;
dVelocity = tempVelocity;
dAcceleration = (tension * (endPosition - tempPosition)) - friction * tempVelocity;
// Take the weighted sum of the 4 derivatives as the final output.
double dxdt = 1.0f/6.0f * (aVelocity + 2.0f * (bVelocity + cVelocity) + dVelocity);
double dvdt = 1.0f/6.0f * (aAcceleration + 2.0f * (bAcceleration + cAcceleration) + dAcceleration);
position += dxdt * dt;
velocity += dvdt * dt;
return position;
}
所以结束判定还需要设置一个阈值,当速度和偏移量小于此数值的时候,可以认定为达到了目的地
private boolean isAtReset(SpringPhysicsState physicsState, double positionDis){
return Math.abs(physicsState.getVelocity()) < getDensity() * MIN_RESET_VELOCITY &&
(Math.abs(positionDis) < getDensity() * MIN_RESET_POSITION || sgn(physicsState.getTension()) == 0);
}
常数系数选择
// 用于 sgn 函数
private static final double EPS = 1e-4;
// 每一步计算的时间间隔
private static final double SOLVER_TIMESTEP_SEC = 0.001;
// 最大的计算时间间隔 dt
private static final double MAX_DELTA_TIME_SEC = 0.064;
// reset 位置 0.05 dp/s 0.05dp
private static final double MIN_RESET_VELOCITY = 0.05;
private static final double MIN_RESET_POSITION = 0.05;
// 缩放开始速度
private static final double AUTO_SCALE_VELOCITY = 10;
// 系数常数
// 滑动时候的摩擦力
private static final double FLING_FRICTION = 1;
private static final double FRICTION = 12;
private static final double TENSION = 80;
一些坑
对于 ViewPager 的适配有些问题,如果在 Down 的时候 requestDisallow true 移动过程中到了左右边界又 requestDisallow false,此时 ViewPager 会有一个突变(突变可耻但有用),而且多指头的时候可能会崩溃,这是 ViewPager的 Bug,具体细节请看源码