卫星导航定位技术一
本人曾从事过智能驾驶研发的相关工作,有幸涉足了车辆定位的相关工作。自动驾驶的定位要求相当高,一般要要达到厘米级。个人了解到的方案是RTK GPS结合激光雷达、摄像头、高精度地图的融合方案。而由于本团队资金能力有限,在初步研发阶段只采用了市场上一些主流的GPS模块进行车辆定位。
初期使用某国外公司的GPS模组进行汽车园区内的定位,该模块的优点是已经融合了卡尔曼滤波算法,输出的定位信息已经进行了惯导融合,同时模块可进行参数自标定,使用起来非常方便。在实车进行测试的时候,在车辆直线行驶的过程中,将定位信息上传服务器进行打点显示,发现行使轨迹很直,几乎没有数据的漂移。但是发现在绕着相同路径行驶的形况下,每圈的重合度不高。那么问题来了,究竟是模块的问题,还是其他的问题呢?随后在云车上测看到一篇文章:《通过Super Cruise项目,高德积累了哪些经验?》
在这片文章中,里面说到:对相同路径的采集有一定的差异,两次采集以后会产生差异,这些东西需要绝对定位手段去消除或减低。美国供应商两年采集同一个位置的时候,绝对误差是10公分。而对于我们两次采集同一个位置,误差有时候会达到1米甚至1米以上。以下为该片文章的部分原文,详情请参考:
http://mp.weixin.qq.com/s?__biz=MjM5ODY2MzIyMQ==&mid=2652433580&idx=3&sn=ed8249d5b072fc7afc085581584fa17d&chksm=bd2b09f68a5c80e0a7cfe550e4bdb73a1cea5444c30edd4784b27439d0cd682eab2627349629&mpshare=1&scene=1&srcid=07229OzE1ztKklSbjUSJKatV#rd
除了测绘以外,对高精地图生产而言,绝对精度对我们而言非常重要。上面第一个图下面两根线是路边,那两个弯曲的东西是护栏侧边。我们采完图以后,可以看到护栏跟真实值有一定的差异,两次采集以后会产生差异,这些东西需要绝对定位手段去消除或减低。除了依赖千寻这样的商业公司,图商也非常希望国家可以开放更多优质的CORS资源,CORS资源逐步联网。现在已经开放了部分资源,但是联网还是不够好。
美国Super Cruise供应商跟我们交流过程中告诉我们,两年采集同一个位置的时候,绝对误差是10公分。我们很惨,两次采集同一个位置,误差有时候会达到1米甚至1米以上。也有同行在说能做到20公分的绝对精度,这个确实可以做到,我们在生产基地的院子里可以做到三五公分的绝对精度,但是需要做大量的控制点,成本想达到量产不太可能。
随后我们采用了国内某公司的北斗定位模组,接入千寻公司账号,使用其提供的固定RTK数据实现的车辆的亚米级定位,而且采样相同的路径重合度也比较高,但是该模组对四周的环境要求比较高,要求四周空旷,且早上与晚上测量效果较好,不然很难进入固定RTK模式。
针对以上经验,激发了自己对GPS定位研究的兴趣,故在读研期间选修了GPS定位与导航课程。下面来分享一下相关的学习总结。
一、目前比较成熟的卫星导航定位系统
美国的GPS系统
俄罗斯的GLONASS系统
欧洲的Galileo系统
中国的北斗系统
1、全球定位(GPS)系统
三部分组成:空间部分:卫星星座、地面监测部分、用户部分:GPS信号接收机。
空间部分:提供星历和时间信息、发射伪距和载波信号、提供其他辅助信息。
地面监控部分:作用是监测和控制卫星运动,变算卫星星历(导航电文),保持系统时间。
用户部分:接收并观测卫星信号记录和处理数据、提供导航定位信息。
其特点为:测量精度高、观测时间短、提供三维坐标、全天候作业等
2、北斗导航系统的优势
短信服务与导航相结合,增加了通信功能。而其他三种系统仅仅是导航定位和授时。全天候快速定位,极少有盲区,并且兼容GPS系统
二、卫星的运动之开普勒三大定理
1、开普勒第一定理:卫星运动的轨道是一个椭圆,椭圆的一个焦点与地球质心重合。这一定理表明,在中心引力场中,卫星绕地球运动的轨道面是一个通过地球质心的静止平面。轨道椭圆成为开普勒椭圆,其形状与大小不变。
卫星绕地球质心运动的轨道方程:
r 为卫星的地心距离;![]() 为开普勒椭圆长半径;
为开普勒椭圆长半径;![]() 为开普勒椭圆的偏心率;
为开普勒椭圆的偏心率; ![]() 为真近点角。
为真近点角。
2、开普勒第二定理:卫星在过地球质心的平面内运动,其向径在相同时间内扫过的面积相等。
3、开普勒第三定律:卫星运行周期的平方,与轨道椭圆长半径的立方之比为一常量。
数学表达式为: ,其中
,其中![]() 为卫星运动的周期。
为卫星运动的周期。
当开普勒椭圆的长半径确定后,卫星运动的平均角速度也随之确定,且保持不变。
三、无摄卫星运动轨道6参数
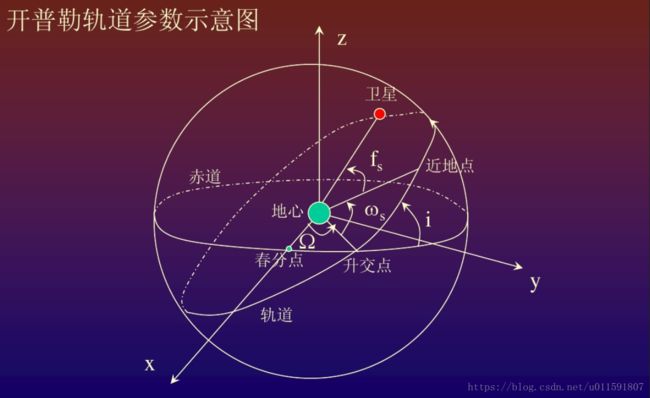
参数1:![]() 为轨道的长半径,参数2:
为轨道的长半径,参数2:![]() 为轨道椭圆偏心率,这两个参数确定了开普勒椭圆的形状和大小。
为轨道椭圆偏心率,这两个参数确定了开普勒椭圆的形状和大小。
参数3:![]() 为升交点赤经,即地球赤道面上升交点与春分点之间的地心夹角。参数4:i为轨道面倾角,即卫星轨道平面与地球赤道面之间的夹角。这两个参数唯一地确定了卫星轨道平面与地球体之间的相对定向。
为升交点赤经,即地球赤道面上升交点与春分点之间的地心夹角。参数4:i为轨道面倾角,即卫星轨道平面与地球赤道面之间的夹角。这两个参数唯一地确定了卫星轨道平面与地球体之间的相对定向。
参数5:![]() 为近地点角距,即在轨道平面上,升交点与近地点之间的地心夹角,表达了开普勒椭圆在轨道平面上的定向。
为近地点角距,即在轨道平面上,升交点与近地点之间的地心夹角,表达了开普勒椭圆在轨道平面上的定向。
参数6:![]() 为卫星的真近点角,即轨道平面上卫星与近地点之间的地心角距。该参数为时间的函数,确定卫星在轨道上的瞬时位置。
为卫星的真近点角,即轨道平面上卫星与近地点之间的地心角距。该参数为时间的函数,确定卫星在轨道上的瞬时位置。
四、卫星运动的摄动力
卫星运行中,除去主要受到地球中心引力作用外,还将收到一下各种摄动力的影响,从而引起轨道的摄动。
地球非中心引力、太阳引力与月亮引力、太阳光的辐射压力、大气阻力、地球潮汐作用力