opencv实现双目视觉测距
有个群193369905,相关毕设也可找群主,最近一直在研究双目视觉测距,资料真的特别多网上,有matlab 的,python的,C++的,但个人感觉都不详细,对于小白,特别不容易上手,在这里我提供一个傻瓜式教程吧,利用matlab来进行标注,图形界面,无须任何代码,然后利用C++实现测距与深度图,原理太多我就不提了,小白直接照做就OK
1、准备工作
硬件准备
https://item.taobao.com/item.htm?spm=a1z10.1-c-s.w4004-17093912817.2.6af681c0jaZTur&id=562773790704
摄像头一个(如图),淘宝连接

软件准备
VS+opencv3.1
Matlab+toolbox标定工具箱
C++代码
Vs+opencv配置各位见这篇博客 https://www.cnblogs.com/linshuhe/p/5764394.html,讲解的够详细了,我们需要用VS+opencv3.1实现实时测距
2matlab标定****
matlab用于单目摄像头,双目摄像头的标定,这个我也已经做过了,各位直接参考这篇博客 http://blog.csdn.net/hyacinthkiss/article/details/41317087
各位准备好上面那些工具以后我们才能正式开始
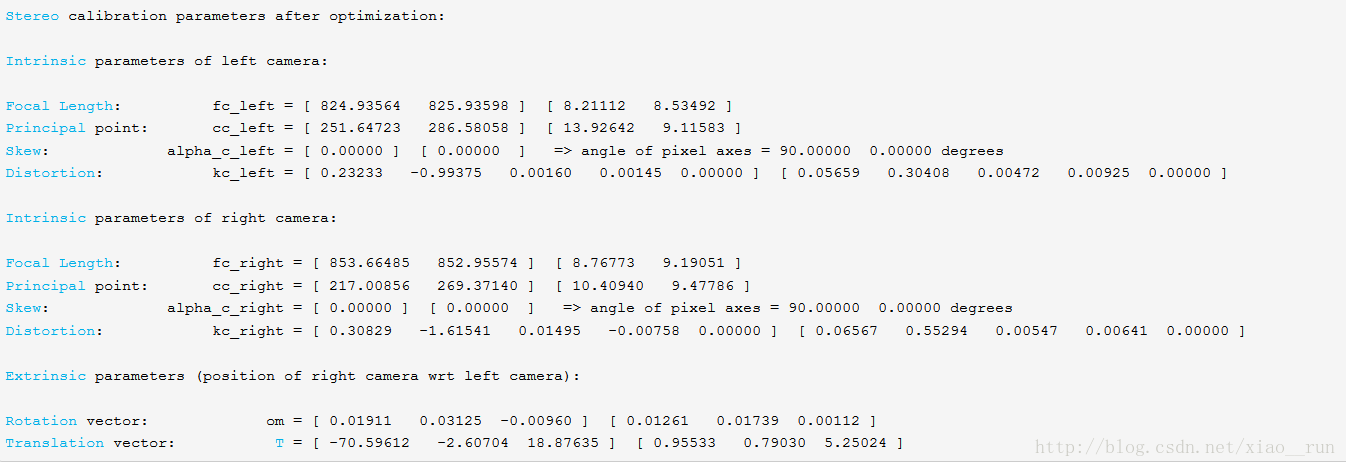
我们通过matlab标定可以获得以下数据
或者使用C++ 进行单双目标定
单目标定
#include 双目标定
//双目相机标定
#include **3 **C++与opencv实现测距 ****
我们把matlab数据填写到下列代码中,各位切记不要填写错误,以免导致出现离奇的数据,我已经注释的非常清楚了;
/*
事先标定好的相机的参数
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixL = (Mat_<double>(3, 3) << 682.55880, 0, 384.13666,
0, 682.24569, 311.19558,
0, 0, 1);
//对应matlab里的左相机标定矩阵
Mat distCoeffL = (Mat_<double>(5, 1) << -0.51614, 0.36098, 0.00523, -0.00225, 0.00000);
//对应Matlab所得左i相机畸变参数
Mat cameraMatrixR = (Mat_<double>(3, 3) << 685.03817, 0, 397.39092,
0, 682.54282, 272.04875,
0, 0, 1);
//对应matlab里的右相机标定矩阵
Mat distCoeffR = (Mat_<double>(5, 1) << -0.46640, 0.22148, 0.00947, -0.00242, 0.00000);
//对应Matlab所得右相机畸变参数
Mat T = (Mat_<double>(3, 1) << -61.34485, 2.89570, -4.76870);//T平移向量
//对应Matlab所得T参数
Mat rec = (Mat_<double>(3, 1) << -0.00306, -0.03207, 0.00206);//rec旋转向量,对应matlab om参数
Mat R;//R 旋转矩阵
4、完整代码 (我这里以上述摄像头拍摄的两张图来作为测距,同样可修改作为视频的实时测距,一定要将图片拷贝到你的工程目录下)
/******************************/
/* 立体匹配和测距 */
/******************************/
#include 如果对此代码和标定过程,或者遇到什么困难,大家可发邮件到[email protected],或者加入到 193369905进行讨论,谢谢大家,原创不易,欢迎打赏