中文文本分类:基于PyTorch的多模型中文文本分类
文本分类作为自然语言处理中最基本的一大任务,应用面特别广,有“万物皆可分”之说,可见其重要性。本文基于PyTorch实现多个模型对中文文本进行分类、比较任务,分别为在序列维度上取平均得到句子表示的简单AVG基线模型、使用[2,3,4]kernel size后concate的CNN模型、双向LSTM模型及BERT模型。
项目代码:代码地址
BERT中文预训练模型:百度网盘链接,提取码:mpzx
数据集
数据集是THUCnews的,清华大学根据新浪新闻RSS订阅频道2005-2011年间的历史数据筛选过滤生成,包含50K训练数据、5K验证数据及10K测试数据,新闻label有体育、娱乐、家居等10个类别。
数据下载链接:cnews下载,提取码:v4fk。
模型搭建
baseline基线模型
基线模型选择简单的基于句子长度维度取word embedding平均来表示的WordAVGModel模型。模型很简单,句子经embedding层后在长度维度上压扁取平均再经全连接层输出。代码如下:
class WordAVGModel(nn.Module):
def __init__(self, vocab_size, embedding_dim, output_dim,dropout=0.2, pad_idx=0):
# 初始化参数,
super().__init__()
self.embedding = nn.Embedding(vocab_size, embedding_dim, padding_idx=pad_idx)
self.fc = nn.Linear(embedding_dim, output_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, text):
# embedded.shape = (batch_size,seq,embed_size)
embedded = self.dropout(self.embedding(text))
pooled = F.avg_pool2d(embedded, (embedded.shape[1], 1)).squeeze(1)
# [batch size, embedding_dim] 把单词长度的维度压扁为1,并降维
return self.fc(pooled)
# (batch size,output_dim)
训练10个epoch,每个epoch后在验证数据集上校验,保存acc最好的那个模型,最后测试集上的结果如下:
| acc | f1-score | acc_and_f1 |
|---|---|---|
| 0.9391 | 0.9385 | 0.9388 |
CNN模型
cnn神经网络在视觉领域应用的特别广泛,nlp中也有其用武之处。相比RNN网络,卷积神经网络最大的优势是可以并行计算效率大幅提高。这里使用3个kernel size为【n,embedding size】(n取2、3、4)的卷积核进行卷积操作,卷积后接max_pool,最后将3个卷积输出concate后经全连接层得到最后输出。代码如下:
class CNN(nn.Module):
def __init__(self, vocab_size, embedding_dim, num_filter,
filter_sizes, output_dim, dropout=0.2, pad_idx=0):
super().__init__()
self.embedding = nn.Embedding(vocab_size, embedding_dim, padding_idx=pad_idx)
self.convs = nn.ModuleList([
nn.Conv2d(in_channels=1, out_channels=num_filter,
kernel_size=(fs, embedding_dim))
for fs in filter_sizes
])
# in_channels:输入的channel,文字都是1
# out_channels:输出的channel维度
# fs:每次滑动窗口计算用到几个单词,相当于n-gram中的n
# for fs in filter_sizes用好几个卷积模型最后concate起来看效果。
self.fc = nn.Linear(len(filter_sizes) * num_filter, output_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, text):
embedded = self.dropout(self.embedding(text)) # [batch size, sent len, emb dim]
embedded = embedded.unsqueeze(1) # [batch size, 1, sent len, emb dim]
# 升维是为了和nn.Conv2d的输入维度吻合,把channel列升维。
conved = [F.relu(conv(embedded)).squeeze(3) for conv in self.convs]
# conved = [batch size, num_filter, sent len - filter_sizes+1]
# 有几个filter_sizes就有几个conved
pooled = [F.max_pool1d(conv,conv.shape[2]).squeeze(2) for conv in conved] # [batch,num_filter]
cat = self.dropout(torch.cat(pooled, dim=1))
# cat = [batch size, num_filter * len(filter_sizes)]
# 把 len(filter_sizes)个卷积模型concate起来传到全连接层。
return self.fc(cat)
同样训练10个epoch,并保存验证集上acc最高的模型。
| acc | f1-score | acc_and_f1 |
|---|---|---|
| 0.979 | 0.9789 | 0.9790 |
RNN模型
RNN神经网络借助hidden state对信息的存储、传递特别适合处理文本序列数据,不过存在长城依赖及梯度爆炸问题。LSTM通过引入门控机制对RNN进行改进,可有效缓解相关问题,双向LSTM对文本语义信息的提取能力又更强。代码如下:
class RNN(nn.Module):
def __init__(self, vocab_size, embedding_dim, hidden_dim, output_dim,
n_layers=2, bidirectional=True, dropout=0.2, pad_idx=0):
super().__init__()
self.embedding = nn.Embedding(vocab_size, embedding_dim, padding_idx=pad_idx)
self.rnn = nn.LSTM(embedding_dim, hidden_dim, num_layers=n_layers,batch_first=True,
bidirectional=bidirectional)
self.fc = nn.Linear(hidden_dim * 2, output_dim)
# 这里hidden_dim乘以2是因为是双向,需要拼接两个方向,跟n_layers的层数无关。
self.dropout = nn.Dropout(dropout)
def forward(self, text):
# text.shape=[seq_len, batch_size]
embedded = self.dropout(self.embedding(text))
# output: [batch,seq,2*hidden if bidirection else hidden]
# hidden/cell: [bidirec * n_layers, batch, hidden]
output, (hidden, cell) = self.rnn(embedded)
# concat the final forward (hidden[-2,:,:]) and backward (hidden[-1,:,:]) hidden layers
hidden = self.dropout(torch.cat((hidden[-2, :, :], hidden[-1, :, :]), dim=1))
# hidden = [batch size, hid dim * num directions],
return self.fc(hidden.squeeze(0)) # 在接一个全连接层,最终输出[batch size, output_dim]
模型训练10个epoch,结果如下
| acc | f1-score | acc_and_f1 |
|---|---|---|
| 0.9676 | 0.9672 | 0.9674 |
BERT模型
BERT(原始论文地址)基于Transformers Encoder,使用MLM获取双向融合信息,在海量连续语料上进行预训练。得到的预训练模型,基于下游任务只需简单的fine-tuning就能获得特别好的结果,使用简单效果强大。这里使用huggingface transformers开源的工具库,中文预训练模型为崔一鸣开源的,本文开头也有提供百度网盘链接。训练代码如下:
""" Finetuning the library models for sequence classification on GLUE (Bert, XLM, XLNet, RoBERTa)."""
from __future__ import absolute_import, division, print_function
import argparse
import glob
import logging
import os
import random
import numpy as np
import torch
from torch.utils.data import (DataLoader, RandomSampler, SequentialSampler,
TensorDataset)
from torch.utils.data.distributed import DistributedSampler
from transformers import DataProcessor, InputExample, InputFeatures
try:
from torch.utils.tensorboard import SummaryWriter
except:
from tensorboardX import SummaryWriter
from tqdm import tqdm, trange
from transformers import (WEIGHTS_NAME, BertConfig,
BertForSequenceClassification, BertTokenizer,
RobertaConfig,
RobertaForSequenceClassification,
RobertaTokenizer,
XLMConfig, XLMForSequenceClassification,
XLMTokenizer, XLNetConfig,
XLNetForSequenceClassification,
XLNetTokenizer,
DistilBertConfig,
DistilBertForSequenceClassification,
DistilBertTokenizer,
AlbertConfig,
AlbertForSequenceClassification,
AlbertTokenizer,
)
from transformers import AdamW, get_linear_schedule_with_warmup
from transformers import glue_compute_metrics as compute_metrics
from transformers import glue_output_modes as output_modes
from transformers import glue_processors as processors
from transformers import glue_convert_examples_to_features as convert_examples_to_features
from sklearn.metrics import f1_score
logger = logging.getLogger(__name__)
ALL_MODELS = sum((tuple(conf.pretrained_config_archive_map.keys()) for conf in (BertConfig, XLNetConfig, XLMConfig,
RobertaConfig, DistilBertConfig)), ())
MODEL_CLASSES = {
'bert': (BertConfig, BertForSequenceClassification, BertTokenizer),
'xlnet': (XLNetConfig, XLNetForSequenceClassification, XLNetTokenizer),
'xlm': (XLMConfig, XLMForSequenceClassification, XLMTokenizer),
'roberta': (RobertaConfig, RobertaForSequenceClassification, RobertaTokenizer),
'distilbert': (DistilBertConfig, DistilBertForSequenceClassification, DistilBertTokenizer),
'albert': (AlbertConfig, AlbertForSequenceClassification, AlbertTokenizer)
}
def set_seed(args):
random.seed(args.seed)
np.random.seed(args.seed)
torch.manual_seed(args.seed)
if args.n_gpu > 0:
torch.cuda.manual_seed_all(args.seed)
def simple_accuracy(preds, labels):
return (preds == labels).mean()
def acc_and_f1(preds, labels):
acc = simple_accuracy(preds, labels)
f1 = f1_score(y_true=labels, y_pred=preds,average='weighted')
return {
"acc": acc,
"f1": f1,
"acc_and_f1": (acc + f1) / 2,
}
class CnesProcessor(DataProcessor):
"""Processor for the cnews data set (GLUE version)."""
def get_example_from_tensor_dict(self, tensor_dict):
"""See base class."""
return InputExample(tensor_dict['idx'].numpy(),
tensor_dict['sentence'].numpy().decode('utf-8'),
None,
str(tensor_dict['label'].numpy()))
def get_train_examples(self, data_dir):
"""See base class."""
return self._create_examples(
self._read_tsv(os.path.join(data_dir, "cnews.train.txt")), "train")
def get_dev_examples(self, data_dir):
"""See base class."""
return self._create_examples(
self._read_tsv(os.path.join(data_dir, "cnews.test.txt")), "dev")
def get_labels(self):
"""See base class."""
return ["体育",
"娱乐",
"家居",
"房产",
"教育",
"时尚",
"时政",
"游戏",
"科技",
"财经"]
def _create_examples(self, lines, set_type):
"""Creates examples for the training and dev sets."""
examples = []
for (i, line) in enumerate(lines):
guid = "%s-%s" % (set_type, i)
text_a = line[1]
label = line[0]
examples.append(
InputExample(guid=guid, text_a=text_a, text_b=None, label=label))
return examples
processors["cnews"] = CnesProcessor
output_modes["cnews"] = "classification"
def train(args, train_dataset, model, tokenizer):
""" Train the model """
if args.local_rank in [-1, 0]:
tb_writer = SummaryWriter('./runs/bert')
args.train_batch_size = args.per_gpu_train_batch_size * max(1, args.n_gpu)
train_sampler = RandomSampler(train_dataset) if args.local_rank == -1 else DistributedSampler(train_dataset)
train_dataloader = DataLoader(train_dataset, sampler=train_sampler, batch_size=args.train_batch_size)
if args.max_steps > 0:
t_total = args.max_steps
args.num_train_epochs = args.max_steps // (len(train_dataloader) // args.gradient_accumulation_steps) + 1
else:
t_total = len(train_dataloader) // args.gradient_accumulation_steps * args.num_train_epochs
# Prepare optimizer and schedule (linear warmup and decay)
no_decay = ['bias', 'LayerNorm.weight']
optimizer_grouped_parameters = [
{'params': [p for n, p in model.named_parameters() if not any(nd in n for nd in no_decay)],
'weight_decay': args.weight_decay},
{'params': [p for n, p in model.named_parameters() if any(nd in n for nd in no_decay)], 'weight_decay': 0.0}
]
optimizer = AdamW(optimizer_grouped_parameters, lr=args.learning_rate, eps=args.adam_epsilon)
scheduler = get_linear_schedule_with_warmup(optimizer, num_warmup_steps=args.warmup_steps,
num_training_steps=t_total)
if args.fp16:
try:
from apex import amp
except ImportError:
raise ImportError("Please install apex from https://www.github.com/nvidia/apex to use fp16 training.")
model, optimizer = amp.initialize(model, optimizer, opt_level=args.fp16_opt_level)
# multi-gpu training (should be after apex fp16 initialization)
if args.n_gpu > 1:
model = torch.nn.DataParallel(model)
# Distributed training (should be after apex fp16 initialization)
if args.local_rank != -1:
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank],
output_device=args.local_rank,
find_unused_parameters=True)
# Train!
logger.info("***** Running training *****")
logger.info(" Num examples = %d", len(train_dataset))
logger.info(" Num Epochs = %d", args.num_train_epochs)
logger.info(" Instantaneous batch size per GPU = %d", args.per_gpu_train_batch_size)
logger.info(" Total train batch size (w. parallel, distributed & accumulation) = %d",
args.train_batch_size * args.gradient_accumulation_steps * (
torch.distributed.get_world_size() if args.local_rank != -1 else 1))
logger.info(" Gradient Accumulation steps = %d", args.gradient_accumulation_steps)
logger.info(" Total optimization steps = %d", t_total)
global_step = 0
tr_loss, logging_loss = 0.0, 0.0
model.zero_grad()
train_iterator = trange(int(args.num_train_epochs), desc="Epoch", disable=args.local_rank not in [-1, 0])
set_seed(args) # Added here for reproductibility (even between python 2 and 3)
for _ in train_iterator:
epoch_iterator = tqdm(train_dataloader, desc="Iteration", disable=args.local_rank not in [-1, 0])
for step, batch in enumerate(epoch_iterator):
model.train()
batch = tuple(t.to(args.device) for t in batch)
inputs = {'input_ids': batch[0],
'attention_mask': batch[1],
'labels': batch[3]}
if args.model_type != 'distilbert':
inputs['token_type_ids'] = batch[2] if args.model_type in ['bert',
'xlnet'] else None # XLM, DistilBERT and RoBERTa don't use segment_ids
outputs = model(**inputs)
loss = outputs[0] # model outputs are always tuple in transformers (see doc)
if args.n_gpu > 1:
loss = loss.mean() # mean() to average on multi-gpu parallel training
if args.gradient_accumulation_steps > 1:
loss = loss / args.gradient_accumulation_steps
if args.fp16:
with amp.scale_loss(loss, optimizer) as scaled_loss:
scaled_loss.backward()
else:
loss.backward()
tr_loss += loss.item()
if (step + 1) % args.gradient_accumulation_steps == 0:
if args.fp16:
torch.nn.utils.clip_grad_norm_(amp.master_params(optimizer), args.max_grad_norm)
else:
torch.nn.utils.clip_grad_norm_(model.parameters(), args.max_grad_norm)
optimizer.step()
scheduler.step() # Update learning rate schedule
model.zero_grad()
global_step += 1
if args.local_rank in [-1, 0] and args.logging_steps > 0 and global_step % args.logging_steps == 0:
# Log metrics
if args.local_rank == -1 and args.evaluate_during_training: # Only evaluate when single GPU otherwise metrics may not average well
results = evaluate(args, model, tokenizer)
for key, value in results.items():
tb_writer.add_scalar('eval_{}'.format(key), value, global_step)
tb_writer.add_scalar('lr', scheduler.get_lr()[0], global_step)
tb_writer.add_scalar('loss', (tr_loss - logging_loss) / args.logging_steps, global_step)
logging_loss = tr_loss
if args.local_rank in [-1, 0] and args.save_steps > 0 and global_step % args.save_steps == 0:
# Save model checkpoint
output_dir = os.path.join(args.output_dir, 'checkpoint-{}'.format(global_step))
if not os.path.exists(output_dir):
os.makedirs(output_dir)
model_to_save = model.module if hasattr(model,
'module') else model # Take care of distributed/parallel training
model_to_save.save_pretrained(output_dir)
torch.save(args, os.path.join(output_dir, 'training_args.bin'))
logger.info("Saving model checkpoint to %s", output_dir)
if args.max_steps > 0 and global_step > args.max_steps:
epoch_iterator.close()
break
if args.max_steps > 0 and global_step > args.max_steps:
train_iterator.close()
break
if args.local_rank in [-1, 0]:
tb_writer.close()
return global_step, tr_loss / global_step
def evaluate(args, model, tokenizer, prefix=""):
# Loop to handle MNLI double evaluation (matched, mis-matched)
eval_task_names = ("mnli", "mnli-mm") if args.task_name == "mnli" else (args.task_name,)
eval_outputs_dirs = (args.output_dir, args.output_dir + '-MM') if args.task_name == "mnli" else (args.output_dir,)
results = {}
for eval_task, eval_output_dir in zip(eval_task_names, eval_outputs_dirs):
eval_dataset = load_and_cache_examples(args, eval_task, tokenizer, evaluate=True)
if not os.path.exists(eval_output_dir) and args.local_rank in [-1, 0]:
os.makedirs(eval_output_dir)
args.eval_batch_size = args.per_gpu_eval_batch_size * max(1, args.n_gpu)
# Note that DistributedSampler samples randomly
eval_sampler = SequentialSampler(eval_dataset) if args.local_rank == -1 else DistributedSampler(eval_dataset)
eval_dataloader = DataLoader(eval_dataset, sampler=eval_sampler, batch_size=args.eval_batch_size)
# multi-gpu eval
if args.n_gpu > 1:
model = torch.nn.DataParallel(model)
# Eval!
logger.info("***** Running evaluation {} *****".format(prefix))
logger.info(" Num examples = %d", len(eval_dataset))
logger.info(" Batch size = %d", args.eval_batch_size)
eval_loss = 0.0
nb_eval_steps = 0
preds = None
out_label_ids = None
for batch in tqdm(eval_dataloader, desc="Evaluating"):
model.eval()
batch = tuple(t.to(args.device) for t in batch)
with torch.no_grad():
inputs = {'input_ids': batch[0],
'attention_mask': batch[1],
'labels': batch[3]}
if args.model_type != 'distilbert':
inputs['token_type_ids'] = batch[2] if args.model_type in ['bert',
'xlnet'] else None # XLM, DistilBERT and RoBERTa don't use segment_ids
outputs = model(**inputs)
tmp_eval_loss, logits = outputs[:2]
eval_loss += tmp_eval_loss.mean().item()
nb_eval_steps += 1
if preds is None:
preds = logits.detach().cpu().numpy()
out_label_ids = inputs['labels'].detach().cpu().numpy()
else:
preds = np.append(preds, logits.detach().cpu().numpy(), axis=0)
out_label_ids = np.append(out_label_ids, inputs['labels'].detach().cpu().numpy(), axis=0)
eval_loss = eval_loss / nb_eval_steps
if args.output_mode == "classification":
preds = np.argmax(preds, axis=1)
elif args.output_mode == "regression":
preds = np.squeeze(preds)
if eval_task == "cnews":
result = acc_and_f1(preds,out_label_ids)
else:
result = compute_metrics(eval_task, preds, out_label_ids)
results.update(result)
output_eval_file = os.path.join(eval_output_dir, prefix, "eval_results.txt")
with open(output_eval_file, "w") as writer:
logger.info("***** Eval results {} *****".format(prefix))
for key in sorted(result.keys()):
logger.info(" %s = %s", key, str(result[key]))
writer.write("%s = %s\n" % (key, str(result[key])))
return results
def load_and_cache_examples(args, task, tokenizer, evaluate=False):
if args.local_rank not in [-1, 0] and not evaluate:
torch.distributed.barrier() # Make sure only the first process in distributed training process the dataset, and the others will use the cache
processor = processors[task]()
output_mode = output_modes[task]
# Load data features from cache or dataset file
cached_features_file = os.path.join(args.data_dir, 'cached_{}_{}_{}_{}'.format(
'dev' if evaluate else 'train',
'bert',
str(args.max_seq_length),
str(task)))
if os.path.exists(cached_features_file) and not args.overwrite_cache:
logger.info("Loading features from cached file %s", cached_features_file)
features = torch.load(cached_features_file)
else:
logger.info("Creating features from dataset file at %s", args.data_dir)
label_list = processor.get_labels()
if task in ['mnli', 'mnli-mm'] and args.model_type in ['roberta']:
# HACK(label indices are swapped in RoBERTa pretrained model)
label_list[1], label_list[2] = label_list[2], label_list[1]
examples = processor.get_dev_examples(args.data_dir) if evaluate else processor.get_train_examples(
args.data_dir)
features = convert_examples_to_features(examples,
tokenizer,
label_list=label_list,
max_length=args.max_seq_length,
output_mode=output_mode,
pad_on_left=bool(args.model_type in ['xlnet']),
# pad on the left for xlnet
pad_token=tokenizer.convert_tokens_to_ids([tokenizer.pad_token])[0],
pad_token_segment_id=4 if args.model_type in ['xlnet'] else 0,
)
if args.local_rank in [-1, 0]:
logger.info("Saving features into cached file %s", cached_features_file)
torch.save(features, cached_features_file)
if args.local_rank == 0 and not evaluate:
torch.distributed.barrier() # Make sure only the first process in distributed training process the dataset, and the others will use the cache
# Convert to Tensors and build dataset
all_input_ids = torch.tensor([f.input_ids for f in features], dtype=torch.long)
all_attention_mask = torch.tensor([f.attention_mask for f in features], dtype=torch.long)
all_token_type_ids = torch.tensor([f.token_type_ids for f in features], dtype=torch.long)
if output_mode == "classification":
all_labels = torch.tensor([f.label for f in features], dtype=torch.long)
elif output_mode == "regression":
all_labels = torch.tensor([f.label for f in features], dtype=torch.float)
dataset = TensorDataset(all_input_ids, all_attention_mask, all_token_type_ids, all_labels)
return dataset
def main():
parser = argparse.ArgumentParser()
## Required parameters
parser.add_argument("--data_dir", default='./cnews', type=str, required=False,
help="The input data dir. Should contain the .tsv files (or other data files) for the task.")
parser.add_argument("--model_type", default='bert', type=str, required=False,
help="Model type selected in the list: " + ", ".join(MODEL_CLASSES.keys()))
parser.add_argument("--model_name_or_path", default='D:\\NLP\\my-wholes-models\\chinese_wwm_pytorch', type=str, required=False,
help="Path to pre-trained model or shortcut name selected in the list: " + ", ".join(
ALL_MODELS))
parser.add_argument("--task_name", default='cnews', type=str, required=False,
help="The name of the task to train selected in the list: " + ", ".join(processors.keys()))
parser.add_argument("--output_dir", default='./outs', type=str, required=False,
help="The output directory where the model predictions and checkpoints will be written.")
## Other parameters
parser.add_argument("--config_name", default="", type=str,
help="Pretrained config name or path if not the same as model_name")
parser.add_argument("--tokenizer_name", default="", type=str,
help="Pretrained tokenizer name or path if not the same as model_name")
parser.add_argument("--cache_dir", default="", type=str,
help="Where do you want to store the pre-trained models downloaded from s3")
parser.add_argument("--max_seq_length", default=128, type=int,
help="The maximum total input sequence length after tokenization. Sequences longer "
"than this will be truncated, sequences shorter will be padded.")
parser.add_argument("--do_train", action='store_true',
help="Whether to run training.")
parser.add_argument("--do_eval",default=True, action='store_true',
help="Whether to run eval on the dev set.")
parser.add_argument("--evaluate_during_training", action='store_true',
help="Rul evaluation during training at each logging step.")
parser.add_argument("--do_lower_case", action='store_true',
help="Set this flag if you are using an uncased model.")
parser.add_argument("--per_gpu_train_batch_size", default=8, type=int,
help="Batch size per GPU/CPU for training.")
parser.add_argument("--per_gpu_eval_batch_size", default=16, type=int,
help="Batch size per GPU/CPU for evaluation.")
parser.add_argument('--gradient_accumulation_steps', type=int, default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.")
parser.add_argument("--learning_rate", default=2e-5, type=float,
help="The initial learning rate for Adam.")
parser.add_argument("--weight_decay", default=0.0, type=float,
help="Weight deay if we apply some.")
parser.add_argument("--adam_epsilon", default=1e-8, type=float,
help="Epsilon for Adam optimizer.")
parser.add_argument("--max_grad_norm", default=1.0, type=float,
help="Max gradient norm.")
parser.add_argument("--num_train_epochs", default=10.0, type=float,
help="Total number of training epochs to perform.")
parser.add_argument("--max_steps", default=-1, type=int,
help="If > 0: set total number of training steps to perform. Override num_train_epochs.")
parser.add_argument("--warmup_steps", default=0, type=int,
help="Linear warmup over warmup_steps.")
parser.add_argument('--logging_steps', type=int, default=100,
help="Log every X updates steps.")
parser.add_argument('--save_steps', type=int, default=6000,
help="Save checkpoint every X updates steps.")
parser.add_argument("--eval_all_checkpoints",default=True, action='store_true',
help="Evaluate all checkpoints starting with the same prefix as model_name ending and ending with step number")
parser.add_argument("--no_cuda", action='store_true',
help="Avoid using CUDA when available")
parser.add_argument('--overwrite_output_dir', action='store_true',
help="Overwrite the content of the output directory")
parser.add_argument('--overwrite_cache', action='store_true',
help="Overwrite the cached training and evaluation sets")
parser.add_argument('--seed', type=int, default=42,
help="random seed for initialization")
parser.add_argument('--fp16', action='store_true',
help="Whether to use 16-bit (mixed) precision (through NVIDIA apex) instead of 32-bit")
parser.add_argument('--fp16_opt_level', type=str, default='O1',
help="For fp16: Apex AMP optimization level selected in ['O0', 'O1', 'O2', and 'O3']."
"See details at https://nvidia.github.io/apex/amp.html")
parser.add_argument("--local_rank", type=int, default=-1,
help="For distributed training: local_rank")
parser.add_argument('--server_ip', type=str, default='', help="For distant debugging.")
parser.add_argument('--server_port', type=str, default='', help="For distant debugging.")
args = parser.parse_args()
if os.path.exists(args.output_dir) and os.listdir(
args.output_dir) and args.do_train and not args.overwrite_output_dir:
raise ValueError(
"Output directory ({}) already exists and is not empty. Use --overwrite_output_dir to overcome.".format(
args.output_dir))
# Setup distant debugging if needed
if args.server_ip and args.server_port:
# Distant debugging - see https://code.visualstudio.com/docs/python/debugging#_attach-to-a-local-script
import ptvsd
print("Waiting for debugger attach")
ptvsd.enable_attach(address=(args.server_ip, args.server_port), redirect_output=True)
ptvsd.wait_for_attach()
# Setup CUDA, GPU & distributed training
if args.local_rank == -1 or args.no_cuda:
device = torch.device("cuda" if torch.cuda.is_available() and not args.no_cuda else "cpu")
args.n_gpu = torch.cuda.device_count()
else: # Initializes the distributed backend which will take care of sychronizing nodes/GPUs
torch.cuda.set_device(args.local_rank)
device = torch.device("cuda", args.local_rank)
torch.distributed.init_process_group(backend='nccl')
args.n_gpu = 1
args.device = device
# Setup logging
logging.basicConfig(format='%(asctime)s - %(levelname)s - %(name)s - %(message)s',
datefmt='%m/%d/%Y %H:%M:%S',
level=logging.INFO if args.local_rank in [-1, 0] else logging.WARN)
logger.warning("Process rank: %s, device: %s, n_gpu: %s, distributed training: %s, 16-bits training: %s",
args.local_rank, device, args.n_gpu, bool(args.local_rank != -1), args.fp16)
# Set seed
set_seed(args)
# Prepare GLUE task
args.task_name = args.task_name.lower()
if args.task_name not in processors:
raise ValueError("Task not found: %s" % (args.task_name))
processor = processors[args.task_name]()
args.output_mode = output_modes[args.task_name]
label_list = processor.get_labels()
num_labels = len(label_list)
# Load pretrained model and tokenizer
if args.local_rank not in [-1, 0]:
torch.distributed.barrier() # Make sure only the first process in distributed training will download model & vocab
args.model_type = args.model_type.lower()
config_class, model_class, tokenizer_class = MODEL_CLASSES[args.model_type]
config = config_class.from_pretrained(args.config_name if args.config_name else args.model_name_or_path,
num_labels=num_labels,
finetuning_task=args.task_name,
cache_dir=args.cache_dir if args.cache_dir else None)
tokenizer = tokenizer_class.from_pretrained(args.tokenizer_name if args.tokenizer_name else args.model_name_or_path,
do_lower_case=args.do_lower_case,
cache_dir=args.cache_dir if args.cache_dir else None)
model = model_class.from_pretrained(args.model_name_or_path,
from_tf=bool('.ckpt' in args.model_name_or_path),
config=config,
cache_dir=args.cache_dir if args.cache_dir else None)
if args.local_rank == 0:
torch.distributed.barrier() # Make sure only the first process in distributed training will download model & vocab
model.to(args.device)
logger.info("Training/evaluation parameters %s", args)
# Training
if args.do_train:
train_dataset = load_and_cache_examples(args, args.task_name, tokenizer, evaluate=False)
global_step, tr_loss = train(args, train_dataset, model, tokenizer)
logger.info(" global_step = %s, average loss = %s", global_step, tr_loss)
# Saving best-practices: if you use defaults names for the model, you can reload it using from_pretrained()
if args.do_train and (args.local_rank == -1 or torch.distributed.get_rank() == 0):
# Create output directory if needed
if not os.path.exists(args.output_dir) and args.local_rank in [-1, 0]:
os.makedirs(args.output_dir)
logger.info("Saving model checkpoint to %s", args.output_dir)
# Save a trained model, configuration and tokenizer using `save_pretrained()`.
# They can then be reloaded using `from_pretrained()`
model_to_save = model.module if hasattr(model,
'module') else model # Take care of distributed/parallel training
model_to_save.save_pretrained(args.output_dir)
tokenizer.save_pretrained(args.output_dir)
# Good practice: save your training arguments together with the trained model
torch.save(args, os.path.join(args.output_dir, 'training_args.bin'))
# Load a trained model and vocabulary that you have fine-tuned
model = model_class.from_pretrained(args.output_dir)
tokenizer = tokenizer_class.from_pretrained(args.output_dir)
model.to(args.device)
# Evaluation
results = {}
if args.do_eval and args.local_rank in [-1, 0]:
tokenizer = tokenizer_class.from_pretrained(args.output_dir, do_lower_case=args.do_lower_case)
checkpoints = [args.output_dir]
if args.eval_all_checkpoints:
checkpoints = list(
os.path.dirname(c) for c in sorted(glob.glob(args.output_dir + '/**/' + WEIGHTS_NAME, recursive=True)))
logging.getLogger("transformers.modeling_utils").setLevel(logging.WARN) # Reduce logging
logger.info("Evaluate the following checkpoints: %s", checkpoints)
for checkpoint in checkpoints:
global_step = checkpoint.split('-')[-1] if len(checkpoints) > 1 else ""
prefix = "checkpoint-" + str(checkpoint.split("-")[-1]) if checkpoint.find('checkpoint') != -1 else ""
model = model_class.from_pretrained(checkpoint)
model.to(args.device)
result = evaluate(args, model, tokenizer, prefix=prefix)
result = dict((k + '_{}'.format(global_step), v) for k, v in result.items())
results.update(result)
return results
if __name__ == "__main__":
main()
模型也同样训练了10个epoch,每个epoch保存一次模型,测试集上的结果如下:
| acc | f1-score | acc_and_f1 |
|---|---|---|
| 0.9656 | 0.9654 | 0.9655 |
结果分析
模型训练比对图如下:
| 模型 | acc | f1-score | acc_and_f1 |
|---|---|---|---|
| AVG | 0.9391 | 0.9385 | 0.9388 |
| CNN | 0.979 | 0.9789 | 0.9790 |
| RNN | 0.9676 | 0.9672 | 0.9674 |
| BERT | 0.9656 | 0.9654 | 0.9655 |
模型的训练loss对比图如下,从上往下依次为AVG、RNN、CNN、BERT,梯度优化算法都采用的Adam,且学习率线性衰减。
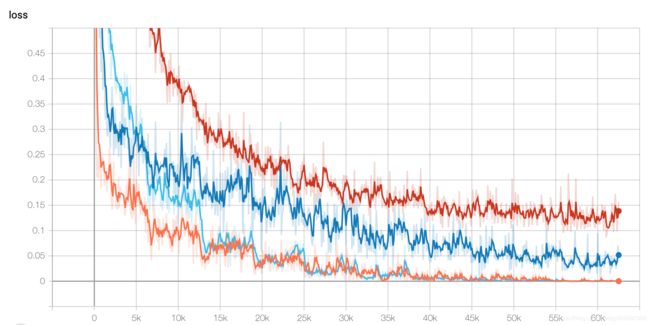
我们发现3个指标都是CNN模型最终表现最佳,不过对于BERT模型,第一个epoch时模型指标就已经和最终指标相差不大
| BERT | acc | f1-score | acc_and_f1 |
|---|---|---|---|
| 1 epoch | 0.9654 | 0.9652 | 0.9653 |
| 2 epoch | 0.9511 | 0.9503 | 0.9507 |
| 3 epoch | 0.9639 | 0.9637 | 0.9638 |
| - - - |
综合比较:
- 对词向量取平均的AVG模型准确率也能达到0.9391,说明神经网络的拟合能力确实超强,同时AVG模型简单直接性能也不错,可以作为一个baseline选择
- 训练数据集可能比较简单
- CNN模型在数据集上表现最佳,且训练时间最短,说明在简单任务或复杂模型架构中可以加入CNN网络,没必要万事BERT起步
- BERT模型未能达到最佳性能,可能得推测为数据集相对简单。且BERT简单fine-tuning一个epoch指标已经很高,说明BERT在某些简单任务上不做fine-tuning都可以。参考论文To Tune or Not to Tune。
后续工作
寻找更大更复杂的中文文本分类数据集,AVG模型表现也不错,对于BERT模型做文本分类任务的启发:可能取CLS token做文本分类任务替换成在序列长度维度上取平均后进行分类效果会更好一点。