zcu102_16_PL端读写DDR4
文章目录
- 建立工程
- 板卡器件及对应IP
- IP用户接口地址映射
- DDR4 MIG IP的读写时序
- 封装设计
- 测试工程说明
本试验建立DDR4读写的MIG IP核,并且对其读写时序进行封装实现类似FIFO的读写接口。
测试工程已上传至https://download.csdn.net/download/botao_li/11310123
建立工程
参考之前的文档在Vivado内建立基于zcu102开发板的测试工程
板卡器件及对应IP
参考ug1182,在zcu102板卡上与PL连接的DDR4外部存储器件为MT40A256M16GE-075E
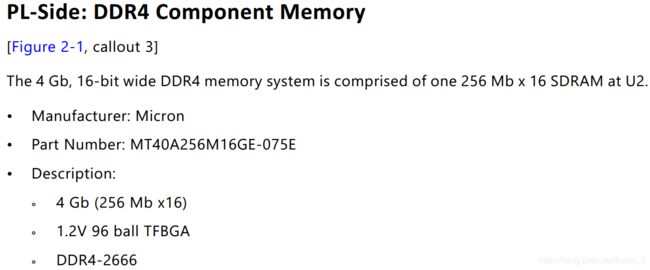
在Micron的官方网站找到该器件,并下载Data Sheet
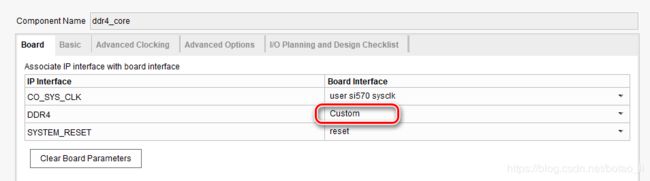
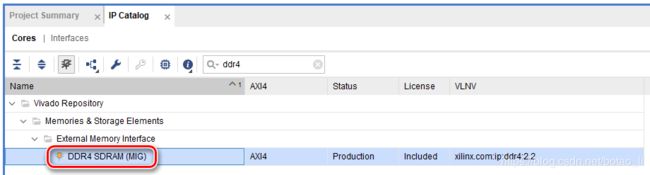
在Vivado工程中用IP Catalog中查找DDR4 SDRAM的IP核,双击并配置IP
按照默认Board配置
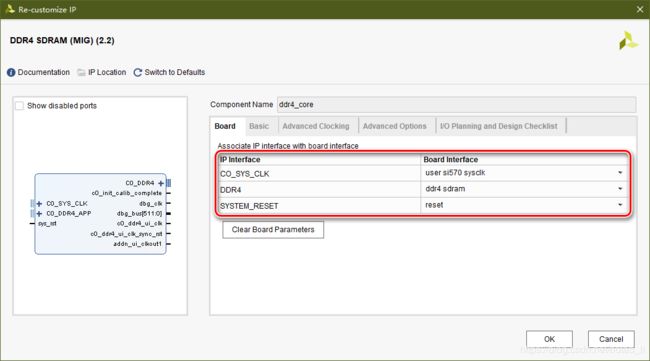
其它配置项保持默认,生成IP
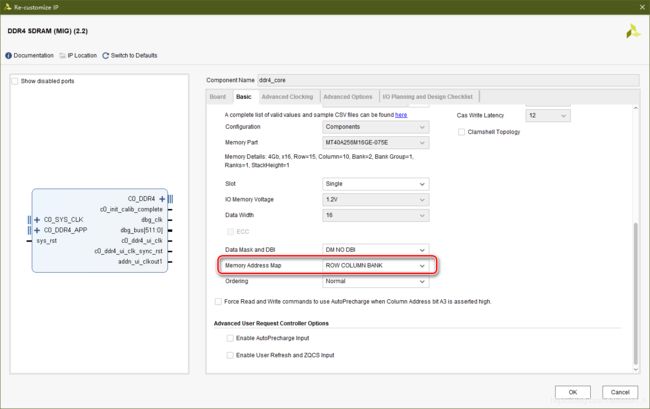
IP用户接口地址映射
IP使用默认配置的ROW COLUMN BANK的地址映射方式
IP的用户接口时序参考IP手册pg150
根据手册的说明
This mapping can have a significant impact on memory bandwidth utilization. “Row_COLUMN_BANK” is the recommended MEM_ADDR_ORDER setting.
因此在使用过程中直接顺序使用地址即可保证最大读写带宽,不用进行专门的地址特殊处理。
在User Interface章节查看地址映射部分(Rank指共用指令和地址的多个器件,此处不考虑)
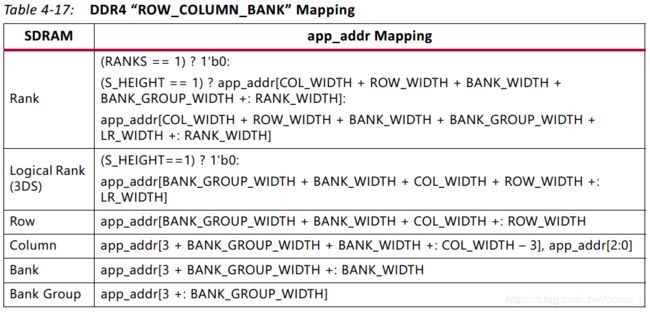
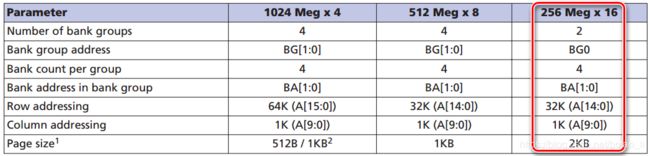
参考DDR4器件的地址分配说明
注意:x16表示DDR4器件的数据总线DQ位宽为16,并不是表示Bank数目
最终用户接口的app_addr分配如下:
| app_addr | 寻址 |
|---|---|
| app_addr[3] | Bank Group选择 |
| app_addr[5:4] | Bank Group内Bank选择 |
| {app_addr[12:6], app_addr[2:0]} | Bank内Column选择 |
| app_addr[27:13] | Bank内Row选择 |
app_addr寻址针对的是完整的数据总线,而不是1比特数据,因此256Mbx16表示寻址范围是 256 × 1024 × 1024 256\times 1024\times 1024 256×1024×1024,即 r o w × c o l u m n × b a n k × b a n k G r o u p row\times column\times bank\times bankGroup row×column×bank×bankGroup
DDR4 MIG IP的读写时序
参考IP手册pg150。
读操作时序如下图所示:

app_cmd, app_addr, app_en, app_rdy为3个指令接口信号,其中app_cmd表示读写指令,app_addr表示读写指令对应的地址值,app_en表示指令有效,在(app_en & app_rdy)条件下当前指令被IP接受。
读出数据为app_rd_data,app_rd_data_valid指示当前读出数据有效。读指令被IP接受后,需要等待一般不定的时间才能收到有效的读出数据。
相比较读操作时序,写操作时序非常复杂,并且
写操作时序如下图所示:
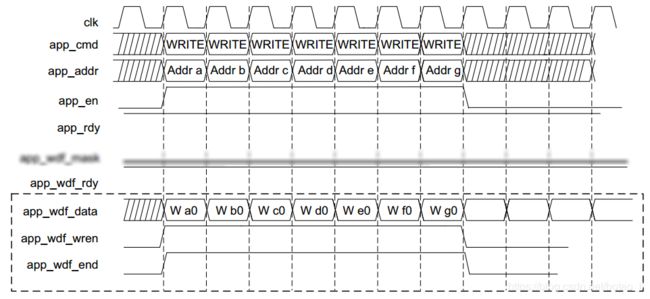
写操作实际分为两个部分,写指令和写数据,独立与IP交互
写指令接口信号与读指令接口信号相同,用app_cmd区分。
写数据接口信号包括app_wdf_data, app_wdf_wren, app_wdf_end, app_wdf_rdy,app_wdf_data表示数据值,app_wdf_wren表示当前数据值有效,app_wdf_end与app_wdf_wren同步,在(app_wdf_wren & app_wdf_rdy)条件下当前写数据被IP接受。
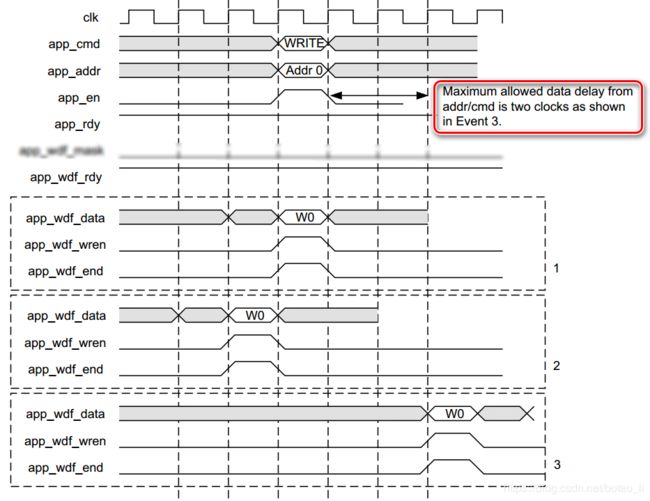
写数据与写指令的时序对齐关系如下图所示,即写数据可以提前写指令1个时钟周期或者滞后写指令1个或2个时钟周期。
在编程实现时,最方便的实现方法是写指令和写数据同步赋值为有效,然后检查app_rdy和app_wdf_rdy的数值,分为4种情况:
- {app_rdy, app_wdf_rdy} == 2’b11:当前写指令和写数据同时被IP接受,可以更新下个写指令和写数据
- {app_rdy, app_wdf_rdy} == 2’b10:当前写指令被IP接受,但是写数据未被IP接受,停止写指令,保持写数据接口状态直到app_wdf_rdy值为1(测试中未出现该情况)
- {app_rdy, app_wdf_rdy} == 2’b01:当前写数据被IP接受,但是写指令未补IP接受,停止写数据,保持写指令接口状态直到app_rdy值为1
- {app_rdy, app_wdf_rdy} == 2’b00:当前写指令和写数据都未被IP接受,保持写指令和写数据接口状态,等待app_rdy和app_wdf_rdy的变化
在早期测试中未理解写指令和写数据相互独立,将app_en和app_wdf_wren进行同步控制,导致在出现上述3情况(2未出现)的时候,某些地址没有与应当写入的数据对齐,而且由于写指令可以接受一定范围内的写数据,导致数据与地址错误对应。
封装设计
DDR外部存储一般用于大数据量的缓存,使用时最好可以使用连续写或或者连续读。
对于写操作而言,写指令和写数据两个部分的相互配合导致MIG IP的用户接口无法实现连续写。
在不关心DDR存储地址的使用场景下,可以将DDR4 MIG IP封装实现类似FIFO的读写接口。
设计如下图所示:
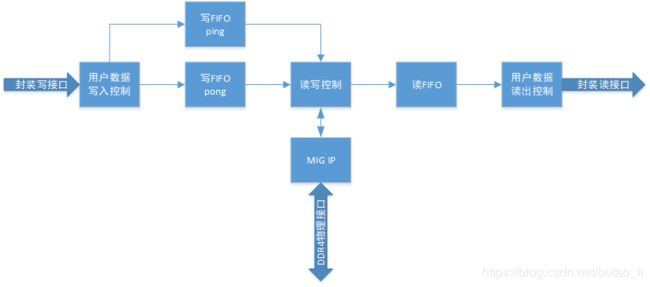
用ping/pong 2个FIFO缓存用户写入的数据,用户写入数据时交替写入2个FIFO,将数据送入IP的用户接口时,交替从2个FIFO读出数据。
使用2个FIFO的原因是为了在取出1个FIFO的读数据时,可以控制另1个FIFO的读使能,使得读出数据可以交替连续使用。
在使用1个FIFO的情况下,为了保证FIFO读数据连续,必须使用组合逻辑控制FIFO读使能,但是由于时钟频率较高(300MHz),以及写操作指令和数据的复杂配合方式,最终导致读使能的组合逻辑控制无法满足时序约束。
读FIFO只有1个的原因在于IP用户接口的读操作较为简单,从DDR4中读出的数据直接写入FIFO,并且将FIFO的读接口封装给用户使用。
除此以外,需要使用2个计数器记录当前DDR4的可写地址数目和可读地址数目,对IP用户接口读写时写操作的地址数目不能超过可写地址数,读操作的地址数目不能超过可读地址数,否则会出现DDR4的满写或者空读情况。
封装后的读写控制使用状态机实现,共6种状态:
- 等待状态:DDR4可读数目和读FIFO可写数目都大于门限时启动读流程(按门限值数目读出DDR4数据并且写入读FIFO中),DDR4可写数目和写FIFO可读数目(2个FIFO可读数之和)都大于门限时启动写流程(按门限数目将写FIFO中的数据读出后写入DDR4中),读操作优先。
- 读指令状态:产生门限数目个读指令并等待IP接受全部指令,完成后进入读数据状态。在当前状态下也可能接收读数据。
- 读数据状态:等待IP送出门限数目个读数据,完成后回到等待状态。
- 正常写状态:判断app_rdy和app_wdf_rdy状态,按照[写操作的4种情况](#DDR4 MIG IP的读写时序)进行处理,如果写指令和写数据都被IP接受则更新写指令和写数据;如果写指令或者写数据只有1个被IP接受则状态转移;如果都不被IP接受则状态保持,等待app_rdy和app_wdf_rdy的状态变化
- 等待写数据状态:在此状态下写指令已被接受,写数据等待被IP接受(即app_wdf_rdy信号),如果被接受则更新下个写指令和写数据,并且状态回到正常写状态;如果不被接受,则保持状态等待app_wdf_rdy变化
- 等待读数据状态:在此状态下写数据已被接受,写指令等待被IP接受(即app_rdy信号),如果被接受则更新下个写指令和写数据,并且状态回到正常写状态;如果不被接受,则保持状态等待app_rdy变化
封装代码如下:
`timescale 1ns / 1ps
module mig_fifo(
//MIG用户接口
input ui_clk,//MIG用户接口时钟
input ui_rst,//MIG用户接口复位
output ui_en,//指令有效标记
output [2:0] ui_cmd,//写指令3’b000,读指令3'b001
output [27:0] ui_addr,//地址,每个地址对应DDR4物理层16位数据总线
input ui_rdy,//指令被接受标记
input [127:0] ui_rd_data,//读数据
input ui_rd_data_valid,//读数据有效
output ui_wdf_wren,//写数据有效标记
output ui_wdf_end,//写数据结束,与ui_wdf_wren对齐
output [127:0] ui_wdf_data,//写数据
input ui_wdf_rdy,//数据可写标记,表示MIG内部缓冲可以装下新的写数据
//FIFO操作接口
input wr_en,//写使能
output wr_able,//可写入WR_BLK个数据,写入过程中可能变为无效
input [127:0] wr_data,//写入数据
input rd_en,//读使能
output rd_able,//可读出RD_BLK个数据,读出过程中可能变为无效
output [127:0] rd_data,//读出数据,比rd_en延迟1个时钟周期
output rd_data_valid//读出数据有效,比rd_en延迟1个时钟周期
);
//用于输出wr_able和rd_able的判断
//外部模块一次写入的数据量
//数值必须偶数
parameter WR_BLK = 9'd200;//写FIFO可以写入200个数据
parameter RD_BLK = 9'd128;//读FIFO可以读出128个数据
//MIG用户接口指令值
localparam CMD_WR = 3'b000;
localparam CMD_RD = 3'b001;
//时钟与复位
wire clk;
assign clk = ui_clk;
wire rst;
assign rst = ui_rst;
//例化写FIFO*****************************************************************************************************
//写FIFO由ping/pong 2个FIFO组成,用于保证在数据送入MIG用户接口时,FIFO读使能可以使用时序逻辑赋值,即读使能有效的时钟周期可以使用另1个FIFO赋值
(*keep = "TRUE"*) reg ping_pong_flag_wr = 1'b0;//0表示写入ping,1表示写入pong
(*keep = "TRUE"*) reg ping_pong_flag_rd = 1'b0;//0表示读出ping,1表示读出pong
//注意:ping_pong_flag_rd在未加keep时上板测试发现未能赋值,可能源于vivado的综合bug
reg [127:0] ping_din = 128'd0;
reg ping_wr_en = 1'b0;
(*keep = "TRUE"*) reg ping_rd_en = 1'b0;
(*keep = "TRUE"*) wire [127:0] ping_dout;
wire [8:0] ping_data_count;
reg [8:0] ping_2rd = 9'd0;//可读数据量
reg [8:0] ping_2wr = 9'd256;//可写数据量
always @(posedge clk) begin
if (rst == 1'b1) begin
ping_2rd <= 9'd0;
ping_2wr <= 9'd256;
end
else begin
ping_2rd <= ping_data_count;
ping_2wr <= 9'd256-ping_data_count;
end
end
fifo_ddr4_buf fifo_wr_ping (
.clk(clk), // input wire clk
.srst(rst), // input wire srst
.din(ping_din), // input wire [127 : 0] din
.wr_en(ping_wr_en), // input wire wr_en
.rd_en(ping_rd_en), // input wire rd_en
.dout(ping_dout), // output wire [127 : 0] dout
.full(), // output wire full
.empty(), // output wire empty
.data_count(ping_data_count), // output wire [8 : 0] data_count
.wr_rst_busy(), // output wire wr_rst_busy
.rd_rst_busy() // output wire rd_rst_busy
);
reg [127:0] pong_din = 128'd0;
reg pong_wr_en = 1'b0;
(*keep = "TRUE"*) reg pong_rd_en = 1'b0;
(*keep = "TRUE"*) wire [127:0] pong_dout;
wire [8:0] pong_data_count;
reg [8:0] pong_2rd = 9'd0;//可读数据量
reg [8:0] pong_2wr = 9'd256;//可写数据量
always @(posedge clk) begin
if (rst == 1'b1) begin
pong_2rd <= 9'd0;
pong_2wr <= 9'd256;
end
else begin
pong_2rd <= pong_data_count;
pong_2wr <= 9'd256-pong_data_count;
end
end
fifo_ddr4_buf fifo_wr_pong (
.clk(clk), // input wire clk
.srst(rst), // input wire srst
.din(pong_din), // input wire [127 : 0] din
.wr_en(pong_wr_en), // input wire wr_en
.rd_en(pong_rd_en), // input wire rd_en
.dout(pong_dout), // output wire [127 : 0] dout
.full(), // output wire full
.empty(), // output wire empty
.data_count(pong_data_count), // output wire [8 : 0] data_count
.wr_rst_busy(), // output wire wr_rst_busy
.rd_rst_busy() // output wire rd_rst_busy
);
//读FIFO例化*****************************************************************************
(*keep = "TRUE"*) reg [127:0] rd_din = 128'd0;
(*keep = "TRUE"*) reg rd_wr_en = 1'b0;
reg rd_rd_en = 1'b0;
wire [127:0] rd_dout;
wire [8:0] rd_data_count;
//FIFO读接口
//外部模块在发现rd_able有效后,一次从FIFO读出RD_BLK个数据,不考虑空读的情况
assign rd_data = rd_dout;//由于FIFO具有FWFT属性,dout与rd_en对齐
assign rd_data_valid = rd_rd_en;//由于FIFO具有FWFT属性,
always @(posedge clk) begin
rd_rd_en <= rd_en;
end
reg [8:0] rd_2rd = 9'd0;//可读数据量
reg [8:0] rd_2wr = 9'd256;//可写数据量
always @(posedge clk) begin
if (rst == 1'b1) begin
rd_2rd <= 9'd0;
rd_2wr <= 9'd256;
end
else begin
rd_2rd <= rd_data_count;
rd_2wr <= 9'd256-rd_data_count;
end
end
fifo_ddr4_buf fifo_rd (
.clk(clk), // input wire clk
.srst(rst), // input wire srst
.din(rd_din), // input wire [127 : 0] din
.wr_en(rd_wr_en), // input wire wr_en
.rd_en(rd_rd_en), // input wire rd_en
.dout(rd_dout), // output wire [127 : 0] dout
.full(), // output wire full
.empty(), // output wire empty
.data_count(rd_data_count), // output wire [8 : 0] data_count
.wr_rst_busy(), // output wire wr_rst_busy
.rd_rst_busy() // output wire rd_rst_busy
);
//MIG用户接口状态机*********************************************************
(*keep = "TRUE"*) reg [24:0] ddr4_2wr = 25'h1_FFF_FFF;//DDR4可写数据量,一轮写读操作结束后更新数值
(*keep = "TRUE"*) reg [24:0] ddr4_2rd = 25'd0;//DDR4可读数据量,一轮写读操作结束后更新数值
(*keep = "TRUE"*) reg [24:0] ddr4_wr_addr = 25'd0;//DDR4下个写地址,每次指令赋值时更新下个地址
(*keep = "TRUE"*) reg [24:0] ddr4_rd_addr = 25'd0;//DDR4下个读地址,每次指令赋值时更新下个地址
(*keep = "TRUE"*) reg [24:0] ui_addr_reg = 25'd0;//MIG地址高25位
assign ui_addr = {ui_addr_reg, 3'b000};
reg [2:0] ui_cmd = CMD_RD;
reg ui_en = 1'b0;
reg ui_wdf_wren = 1'b0;
reg [127:0] ui_wdf_data = 128'd0;
assign ui_wdf_end = ui_wdf_wren;
(*keep = "TRUE"*) reg [8:0] cnt_cmd = 9'd1;//MIG指令计数
(*keep = "TRUE"*) reg [8:0] cnt_data = 9'd1;//MIG数据计数,读计数rd_valid,写计数(wren & wdf_rdy)
/*
状态机
状态机工作条件,写读操作都面向缓冲FIFO
读优先
如果DDR4内数据量和读FIFO可写数据量都大于读门限,读出数据进入读FIFO
如果DDR4可写数据量和写FIFO可读数据量都大于写门限,读出写FIFO内数据送入DDR4
注意!!
MIG用户接口的写操作分为2个部分,指令部分与数据部分,2个部分相互独立
({ui_en, ui_rdy} == 2'b11)表示指令被MIG接受,在此之前1个时钟周期或者之后2个时钟周期以内MIG可接受数据
({ui_wdf_wren, ui_wdf_rdy} == 2'b11)表示写数据被MIG接受
*/
localparam IDLE = 6'b000_001;
localparam RD_CMD = 6'b000_010;
localparam RD_DATA = 6'b000_100;
localparam WR = 6'b001_000;
localparam WR_WAIT_DATA = 6'b010_000;
localparam WR_WAIT_CMD = 6'b100_000;
(*keep = "TRUE"*) reg [5:0] state = IDLE;
always @(posedge clk) begin
if (rst == 1'b1) begin
state <= IDLE;
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_wr_addr <= 25'd0;
ddr4_rd_addr <= 25'd0;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
else begin
case (state)
IDLE: begin
if ((ddr4_2rd >= {16'd0, RD_BLK}) && (rd_2wr >= RD_BLK)) begin
//启动1轮读操作,共RD_BLK次读操作
//MIG指令
ui_en <= 1'b1;
ui_cmd <= CMD_RD;
ui_addr_reg <= ddr4_rd_addr;
//更新MIG读地址
ddr4_rd_addr <= ddr4_rd_addr+25'd1;
//状态转移
state <= RD_CMD;
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_wr_addr <= ddr4_wr_addr;//MIG写地址保持
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
else if ((ddr4_2wr >= {16'd0, WR_BLK}) && (pong_2rd >= {1'b0, WR_BLK[8:1]})) begin//用pong判断因为pong晚于ping写入数据
//启动1轮写操作,共WR_BLK次写操作
//MIG指令接口
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ddr4_wr_addr;
//更新MIG写地址
ddr4_wr_addr <= ddr4_wr_addr+25'd1;
//MIG数据接口
ui_wdf_wren <= 1'b1;
ui_wdf_data <= ping_dout;//由于每次读写次数都为偶数,因此启动时一定是读取ping数据
ping_rd_en <= 1'b1;//读出下个ping数据
ping_pong_flag_rd <= 1'b1;//下次读出pong数据
pong_rd_en <= 1'b0;
//状态转移
state <= WR;
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
end
else begin
state <= state;
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_wr_addr <= ddr4_wr_addr;//MIG写地址保持
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
end
RD_CMD: begin//等待MIG接受rd_cnt个读指令
//当前状态ui_en固定为1,MIG接受读指令只用判断ui_rdy
if (ui_rdy == 1'b1) begin
//读指令被接受
case (cnt_cmd)
RD_BLK: begin
//一轮读指令完成,关闭读指令
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG读地址保持
ddr4_rd_addr <= ddr4_rd_addr;
//状态转移,等待数据全部送出
state <= RD_DATA;
end
default: begin
//下个读指令
ui_en <= 1'b1;
ui_cmd <= CMD_RD;
ui_addr_reg <= ddr4_rd_addr;
//更新MIG读地址
ddr4_rd_addr <= ddr4_rd_addr+25'd1;
//状态保持
state <= state;
end
endcase
end
else begin
//读指令保持
ui_en <= 1'b1;
ui_cmd <= CMD_RD;
ui_addr_reg <= ui_addr_reg;
//MIG读地址保持
ddr4_rd_addr <= ddr4_rd_addr;
//状态保持
state <= state;
end
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_wr_addr <= ddr4_wr_addr;//MIG写地址保持
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
RD_DATA: begin
//等待接收rd_cnt个读数据
case ({cnt_data, ui_rd_data_valid})
{RD_BLK, 1'b1}: begin
//一轮读操作全部数据已读出
//状态转移
state <= IDLE;
end
default: begin
//状态保持
state <= state;
end
endcase
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
ddr4_wr_addr <= ddr4_wr_addr;//MIG写地址保持
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
WR: begin
//进入当前状态时,ui_en和ui_wdf_wren值都为1
case ({ui_rdy, ui_wdf_rdy})//判断写指令和写数据被IP接受情况
{1'b1, 1'b1}: begin
//MIG接受写指令和写数据
case (cnt_data)//在此状态下cnt_cmd和cnt_data数值相等,只判断两者之一
WR_BLK: begin
//1轮写操作结束
//写指令结束
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据结束
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
//状态转移
state <= IDLE;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
default: begin
//1轮写操作未完成
//更新下个指令
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ddr4_wr_addr;
//MIG写地址更新
ddr4_wr_addr <= ddr4_wr_addr+25'd1;
//写数据更新
ui_wdf_wren <= 1'b1;
case (ping_pong_flag_rd)
1'b0: begin
//读ping
ui_wdf_data <= ping_dout;
ping_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b1;
pong_rd_en <= 1'b0;
end
1'b1: begin
//读pong
ui_wdf_data <= pong_dout;
pong_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b0;
ping_rd_en <= 1'b0;
end
endcase
//状态保持
state <= state;
end
endcase
end
{1'b1, 1'b0}: begin
//MIG接受写指令,未接受写数据
//指令结束
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据保持
ui_wdf_wren <= 1'b1;
ui_wdf_data <= ui_wdf_data;
//状态转移
state <= WR_WAIT_DATA;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= ping_pong_flag_rd;//保持
end
{1'b0, 1'b1}: begin
//MIG接受写数据,未接受写指令
//写数据停止
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
//指令保持
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ui_addr_reg;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//状态转移
state <= WR_WAIT_CMD;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= ping_pong_flag_rd;//保持
end
{1'b0, 1'b0}: begin
//写指令保持
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ui_addr_reg;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据保持
ui_wdf_wren <= 1'b1;
ui_wdf_data <= ui_wdf_data;
//状态保持
state <= state;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= ping_pong_flag_rd;//保持
end
endcase
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
end
WR_WAIT_DATA: begin
//指令已完成,等待MIG接收写数据
//当状状态下ui_en值为0,ui_wdf_wren值为1
case (ui_wdf_rdy)
1'b1: begin
case (cnt_data)//判断数据计数
WR_BLK: begin
//1轮写操作结束
//指令结束
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据结束
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
//状态转移
state <= IDLE;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
default: begin
//更新下个指令
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ddr4_wr_addr;
//MIG写地址更新
ddr4_wr_addr <= ddr4_wr_addr+25'd1;
//写数据更新
ui_wdf_wren <= 1'b1;
case (ping_pong_flag_rd)
1'b0: begin
//读ping
ui_wdf_data <= ping_dout;
ping_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b1;
pong_rd_en <= 1'b0;
end
1'b1: begin
//读pong
ui_wdf_data <= pong_dout;
pong_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b0;
ping_rd_en <= 1'b0;
end
endcase
//状态转移
state <= WR;
end
endcase
end
1'b0: begin
//指令结束
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据保持
ui_wdf_wren <= 1'b1;
ui_wdf_data <= ui_wdf_data;
//状态保持
state <= state;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= ping_pong_flag_rd;//保持
end
endcase
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
end
WR_WAIT_CMD: begin
//写数据已完成,等待MIG接收写指令
//当前状态ui_wdf_wren值为0,ui_en值为1
case (ui_rdy)
1'b1: begin
case (cnt_cmd)//判断指令计数
WR_BLK: begin
//1轮写操作结束
//指令结束
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//写数据结束
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
//状态转移
state <= IDLE;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
default: begin
//更新下个指令
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ddr4_wr_addr;
//MIG写地址更新
ddr4_wr_addr <= ddr4_wr_addr+25'd1;
//写数据更新
ui_wdf_wren <= 1'b1;
case (ping_pong_flag_rd)
1'b0: begin
//读ping
ui_wdf_data <= ping_dout;
ping_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b1;
pong_rd_en <= 1'b0;
end
1'b1: begin
//读pong
ui_wdf_data <= pong_dout;
pong_rd_en <= 1'b1;
ping_pong_flag_rd <= 1'b0;
ping_rd_en <= 1'b0;
end
endcase
//状态转移
state <= WR;
end
endcase
end
1'b0: begin
//写数据停止
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
//指令保持
ui_en <= 1'b1;
ui_cmd <= CMD_WR;
ui_addr_reg <= ui_addr_reg;
//MIG写地址保持
ddr4_wr_addr <= ddr4_wr_addr;
//状态保持
state <= state;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= ping_pong_flag_rd;//保持
end
endcase
ddr4_rd_addr <= ddr4_rd_addr;//MIG读地址保持
end
default: begin
state <= IDLE;
ui_en <= 1'b0;
ui_cmd <= CMD_RD;
ui_addr_reg <= 25'd0;
ui_wdf_wren <= 1'b0;
ui_wdf_data <= 128'd0;
ddr4_wr_addr <= 25'd0;
ddr4_rd_addr <= 25'd0;
ping_rd_en <= 1'b0;
pong_rd_en <= 1'b0;
ping_pong_flag_rd <= 1'b0;
end
endcase
end
end
//1轮写读操作结束时,更新DDR4可写可读数据量
always @(posedge clk) begin
if (rst == 1'b1) begin
ddr4_2wr <= 25'h1_FFF_FFF;
ddr4_2rd <= 25'd0;
end
else begin
case (state)
IDLE,
RD_CMD: begin
ddr4_2wr <= ddr4_2wr;
ddr4_2rd <= ddr4_2rd;
end
RD_DATA: begin
case ({cnt_data, ui_rd_data_valid})
{RD_BLK, 1'b1}: begin
ddr4_2wr <= ddr4_2wr+{16'd0, RD_BLK};//数据读出,可写数据量增加
ddr4_2rd <= ddr4_2rd-{16'd0, RD_BLK};//数据读出,可读数据量减小
end
default: begin
ddr4_2wr <= ddr4_2wr;
ddr4_2rd <= ddr4_2rd;
end
endcase
end
WR: begin
case ({ui_rdy, ui_wdf_rdy, cnt_data})
{2'b11, WR_BLK}: begin
ddr4_2wr <= ddr4_2wr-{16'd0, WR_BLK};//数据写入,可写数据量减小
ddr4_2rd <= ddr4_2rd+{16'd0, WR_BLK};//数据写入,可读数据量增加
end
default: begin
ddr4_2wr <= ddr4_2wr;
ddr4_2rd <= ddr4_2rd;
end
endcase
end
WR_WAIT_DATA: begin
case ({ui_wdf_rdy, cnt_data})
{1'b1, WR_BLK}: begin
ddr4_2wr <= ddr4_2wr-{16'd0, WR_BLK};//数据写入,可写数据量减小
ddr4_2rd <= ddr4_2rd+{16'd0, WR_BLK};//数据写入,可读数据量增加
end
default: begin
ddr4_2wr <= ddr4_2wr;
ddr4_2rd <= ddr4_2rd;
end
endcase
end
WR_WAIT_CMD: begin
case ({ui_rdy, cnt_cmd})
{1'b1, WR_BLK}: begin
ddr4_2wr <= ddr4_2wr-{16'd0, WR_BLK};//数据写入,可写数据量减小
ddr4_2rd <= ddr4_2rd+{16'd0, WR_BLK};//数据写入,可读数据量增加
end
default: begin
ddr4_2wr <= ddr4_2wr;
ddr4_2rd <= ddr4_2rd;
end
endcase
end
default: begin
ddr4_2wr <= 25'h1_FFF_FFF;
ddr4_2rd <= 25'd0;
end
endcase
end
end
//MIG接受数据计数
always @(posedge clk) begin
case (state)
WR,
WR_WAIT_DATA: begin
cnt_data <= cnt_data+{8'd0, ui_wdf_rdy};
end
WR_WAIT_CMD: begin
cnt_data <= cnt_data;//保持
end
RD_CMD,
RD_DATA: begin
cnt_data <= cnt_data+{8'd0, ui_rd_data_valid};
end
default: begin
cnt_data <= 9'd1;
end
endcase
end
//MIG接受指令计数
always @(posedge clk) begin
case (state)
WR,
WR_WAIT_CMD: begin
cnt_cmd <= cnt_cmd+{8'd0, ui_rdy};
end
WR_WAIT_DATA: begin
cnt_cmd <= cnt_cmd;//保持
end
RD_CMD: begin
//当前状态ui_en固定为1,只判断ui_rdy即表示指令被接受
cnt_cmd <= cnt_cmd+{8'd0, ui_rdy};
end
default: begin
cnt_cmd <= 9'd1;
end
endcase
end
//读出数据写入读FIFO
always @(posedge clk) begin
case (state)
RD_CMD,
RD_DATA: begin
rd_wr_en <= ui_rd_data_valid;
rd_din <= ui_rd_data;
end
default: begin
rd_wr_en <= 1'b0;
rd_din <= 128'd0;
end
endcase
end
//模块写接口数据进入写FIFO
always @(posedge clk) begin
if (rst == 1'b1) begin
ping_pong_flag_wr <= 1'b0;
ping_din <= 128'd0;
ping_wr_en <= 1'b0;
pong_din <= 128'd0;
pong_wr_en <= 1'b0;
end
else begin
case ({wr_en, ping_pong_flag_wr})
{1'b1, 1'b0}: begin
//写入ping
ping_din <= wr_data;
ping_wr_en <= 1'b1;
pong_din <= pong_din;
pong_wr_en <= 1'b0;
ping_pong_flag_wr <= 1'b1;//切换
end
{1'b1, 1'b1}: begin
//写入pong
pong_din <= wr_data;
pong_wr_en <= 1'b1;
ping_din <= ping_din;
ping_wr_en <= 1'b0;
ping_pong_flag_wr <= 1'b0;//切换
end
default: begin
ping_pong_flag_wr <= ping_pong_flag_wr;//保持
ping_din <= ping_din;
ping_wr_en <= 1'b0;
pong_din <= pong_din;
pong_wr_en <= 1'b0;
end
endcase
end
end
//模块可读可写标记
reg wr_able = 1'b0;
reg rd_able = 1'b0;
always @(posedge clk) begin
if (rst == 1'b1) begin
wr_able <= 1'b1;
rd_able <= 1'b0;
end
else begin
if (pong_2wr >= WR_BLK) begin
wr_able <= 1'b1;
end
else begin
wr_able <= 1'b0;
end
if (rd_2rd >= RD_BLK) begin
rd_able <= 1'b1;
end
else begin
rd_able <= 1'b0;
end
end
end
endmodule
测试工程说明
测试工程对整个DDR4的全部地址范围进行持续写读,并且记录数据错误,3小时测试未发现错误。
测试工程中未使用默认的IP配置,因为默认IP配置的DDR4时钟频率为1200MHz,而测试工程中使用DDR4器件的最大频率1333MHz。
器件手册说明如下所示:

IP配置不同处如下,其它配置项保持默认: