手把手教用matlab做无人驾驶(十四)--项目实践(MPCC)
首先导入数据使用matlab程序画图可见;
clear
close all;
clc;
load Tracks/track2.mat %导入数据
figure(1);
plot(track2.outer(1,:),track2.outer(2,:),'k')
hold on
plot(track2.inner(1,:),track2.inner(2,:),'k')

接下来我要在这个地图中去做关于车避障。一般做避障我们首先要把轨道范围缩小。这个给后面MPCC控制限制范围:
matlab程序:
clear
close all;
clc;
ModelParams.W=0.06;
safetyScaling = 1.5;
load Tracks/track2.mat %导入数据
widthTrack = norm([track2.inner(1,1)-track2.outer(1,1),track2.inner(2,1)-track2.outer(2,1)]); %道路宽度
WidthCar = 0.5*ModelParams.W*safetyScaling; %车宽
for i = 1:length(track2.outer)
x1 = track2.outer(1,i);
y1 = track2.outer(2,i);
x2 = track2.inner(1,i);
y2 = track2.inner(2,i);
% vector connecting right and left boundary
numer=(x2-x1);
denom=(y1-y2);
% shrinking ratio
c = WidthCar/widthTrack;
d = -WidthCar/widthTrack;
% shrink track
track.outer(1,i) = x1 + c*numer;
track.inner(1,i) = x2 - c*numer;
track.outer(2,i) = y1 + d*denom;
track.inner(2,i) = y2 - d*denom;
end
figure(1);
plot(track.outer(1,:),track.outer(2,:),'r')
hold on
plot(track.inner(1,:),track.inner(2,:),'r')
plot(track2.outer(1,:),track2.outer(2,:),'k')
plot(track2.inner(1,:),track2.inner(2,:),'k')
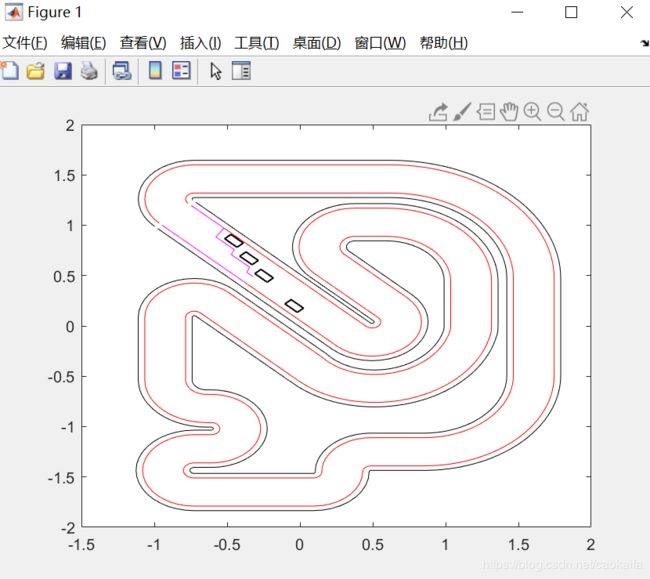
画出的图形如下: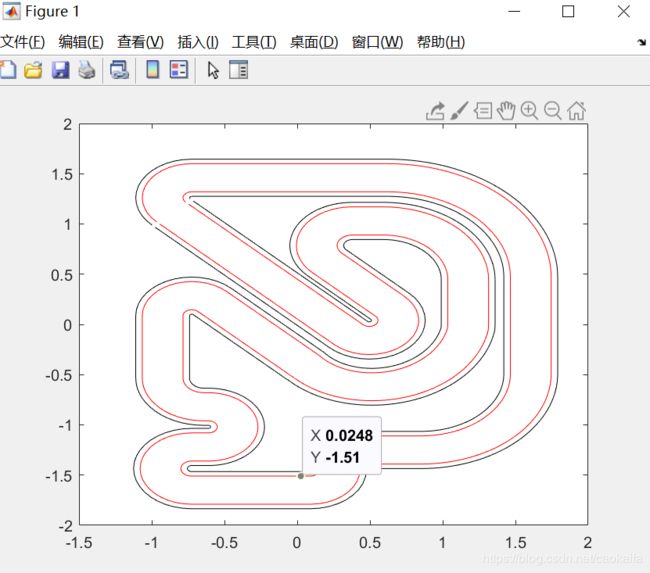
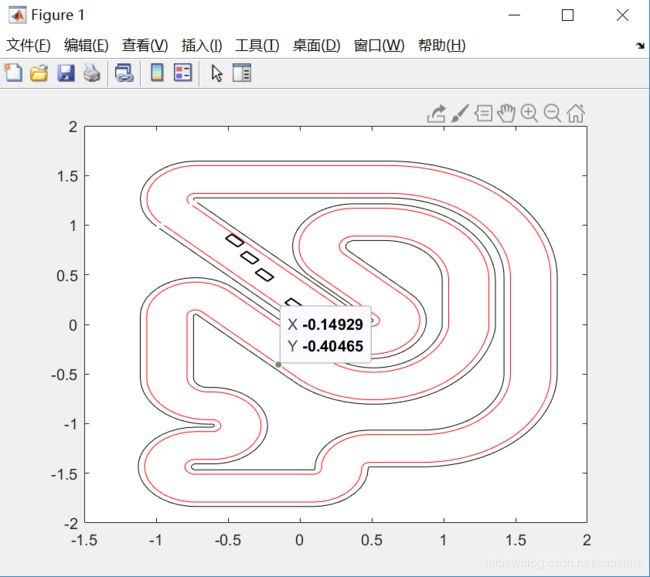
通过增加这段程序即可画出障碍物
%% Ohter cars
Y = ObstacelsState(track,traj,trackWidth,n_cars);
if size(Y,2) ~= n_cars-1
error('n_cars and the number of obstacles in "Y" does not match')
end
%画图障碍物的
figure(1)
if ~isempty(Y)
for i=1:size(Y,2)
carBox(Y(:,i),ModelParams.W/2,ModelParams.L/2)
end
end
现在我们地图已经有了障碍物,怎样去避障呢,我们后面用MPCC控制方法,所以就要新的边界,因为如果按照原来的边界肯定会撞上障碍物,那怎样形成新的边界呢?
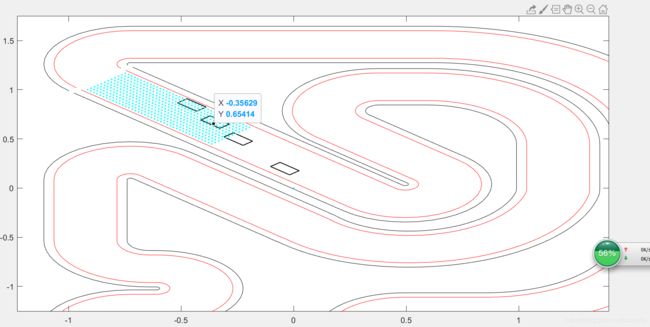
这里我们模型预测圆弧控制的N=40,我们把每一个坐标分为12*40,得到每一个网格的坐标系:
function [grid_x grid_y new_b_default] = getGridCoordinates(traj,borders,track_center,X,DesignParameters,ModelParams)
% assumes x,y are the 1 and 2 states
nx=ModelParams.nx; %状态值为7
N=DesignParameters.N;%预测40步
grid_width=DesignParameters.grid_width; %把车道宽度分为12等分
tracklength = traj.ppx.breaks(end);%给出轨迹的x长度值,初始值可以看到17.8447
% find physical thetas for each future position in X
theta_phys=zeros(N,1);
for i=1:N
xy_posn=X(i*nx+1:i*nx+2);% assume x,y are the 1 and 2 states
theta_virt = X(nx*i+nx);
%approximate theta_phys as theta_virt: should hold if lag error weighting is high enough
theta_virt=mod(theta_virt,tracklength);
theta_phys(i)=theta_virt;
end
TrackLeftx=ppval(borders.pplx,theta_phys);
TrackLefty=ppval(borders.pply,theta_phys);
TrackRightx=ppval(borders.pprx,theta_phys);
TrackRighty=ppval(borders.ppry,theta_phys);
Dx = TrackRightx - TrackLeftx;
Dy = TrackRighty - TrackLefty;
% border if no car is near
new_b_default = [TrackLeftx TrackLefty TrackRightx TrackRighty];
%画边界
%plot(TrackLeftx,TrackLefty,TrackRightx,TrackRighty,'-b','linewidth',5)
grid_x = zeros(N,grid_width);
grid_y = zeros(N,grid_width);
for i=1:N
for j=1:grid_width
% equally spaced grid
grid_x(i,j) = TrackLeftx(i) + j/(grid_width+1)*Dx(i);
grid_y(i,j) = TrackLefty(i) + j/(grid_width+1)*Dy(i);
%画网格坐标
figure(1)
hold on
plot(grid_x,grid_y,'.c')
end
end
end
实现效果如下:
然后通过比较是否网格有障碍物,如果没有障碍物就把原理的边界(即红线作为边界),否则,就要形成新的边界:
如果有障碍物要分为三个部分去形成新的边界:
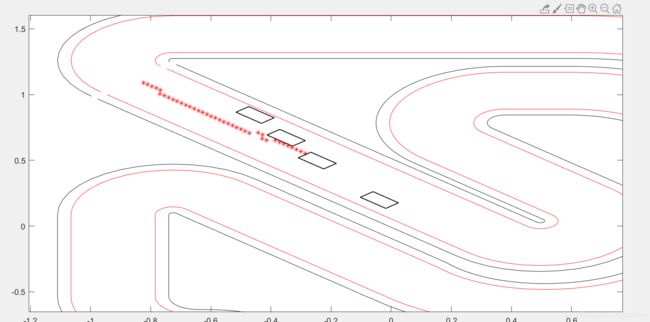
(1)第一步:首先根据40步的状态值和网格值得到最优路径:
function priorPath = Lock2Grid(X,grid_x,grid_y,DesignParameters,ModelParams)
% priorPath - [N]by[1] (dimensionless)
nx = ModelParams.nx;
N = DesignParameters.N;
grid_width = DesignParameters.grid_width;
stateindex_x=ModelParams.stateindex_x;
stateindex_y=ModelParams.stateindex_y;
priorPath = zeros(N,1);
% for c, type cast this to integers
priorPath = cast(priorPath, 'int32');
for i=1:N
min=100; % choose some big number that distance^2 can never reach
ind=1;
for j=1:grid_width
dx = grid_x(i,j) - X(i*nx+stateindex_x);
dy = grid_y(i,j) - X(i*nx+stateindex_y);
d2=dx*dx+dy*dy;
if d2
ind=j;
end
end
priorPath(i) = ind;
figure(1)
hold on
plot(grid_x(i,priorPath(i)),grid_y(i,priorPath(i)),'*r')
end
图如下:
(2)第二步:
可以看出上面的最优路径是会碰撞到障碍物,所以我们要优化上面的最优路径,以至于不要碰撞到障碍物,这里我们使用动态规划,找到避开障碍物的
% Optm_Path_Mtx is [N]by[grid_width]by[grid_width]
% OptmPath is [N]by[1]
N=DesignParameters.N;
DEAD_END_PATH = Constants.DEAD_END_PATH;
OptmPath = zeros(N,1); % initialize.
% OptmPath = cast(OptmPath, 'int32'); % cast to int
OptmPath(1) = Optm_Path_Mtx(1,1,1);
OptmPath(2) = Optm_Path_Mtx(2,OptmPath(1),1);
for i1=3:N
% i1 represents i+1
OptmPath(i1) = Optm_Path_Mtx(i1,OptmPath(i1-1),OptmPath(i1-2));
figure(1)
hold on
plot(grid_x(i1,OptmPath(i1)),grid_y(i1,OptmPath(i1)),'*r')
if OptmPath(i1)==DEAD_END_PATH
% exit function. Find_Nearest_Borders() will take care of the rest.
disp('BLAAAAAAAAAAAAAAAAAAAAAAAAAAAAH');
return;
end
end

最后根据这个优化的轨迹得到新的边界如下图,然后这个新的边界输入到MPCC或MPC控制器中:
现在可能有的人会问这个新边界是怎么得到的呢?这个新边界是根据把车长宽外扩,最后求这车的四边与两边的交点即可。
grid_width=DesignParameters.grid_width;
nx=ModelParams.nx;
N=DesignParameters.N;
carlength=DesignParameters.carlength;
carwidth=DesignParameters.carwidth;
UNOCCUPIED=Constants.UNOCCUPIED;
DEAD_END_PATH = Constants.DEAD_END_PATH;
LAST_BORDER_XMAX=Constants.LAST_BORDER_XMAX;
new_b_L = zeros(N,2); %左边边界
new_b_R = zeros(N,2); %右边边界
% for each row
for i=1:N
j_optm = OptmPath(i);
if j_optm==DEAD_END_PATH
% (i,j_optm) is invalid for any choice of j_optm
% note that (i-1,j_prev) is still a valid position
if i==1
% cannot use previous borders, what to do?
error('no valid first point');
end
j_prev=OptmPath(i-1);
% if not first point, use borders from previous point for rest of
% horizon
for ii=i:N
new_b_L(ii,:)=new_b_L(i-1,:);
new_b_R(ii,:)=new_b_R(i-1,:);
end
new_b = [new_b_L new_b_R];
% set the last border
P1=[grid_x(i-1,j_prev) grid_y(i-1,j_prev)];
P2=[grid_x( i,j_prev) grid_y( i,j_prev)];
last_border=calculate_last_border(P1,P2);
% figure(5);hold on;
% plot(grid_x,grid_y,'go');
% plot([P1(1) P2(1)],[P1(2) P2(2)],'r*');
% xx=[-2,2];
% yy=(last_border(3)-last_border(1)*xx)/last_border(2);
% plot(xx,yy,'b');
% axis([-2 2 -2 2]);
return; % exit from function
end
% x,y coordinates of left and right track borders
Lx=new_b_default(i,1);
Ly=new_b_default(i,2);
Rx=new_b_default(i,3);
Ry=new_b_default(i,4);
% identify which is first point to left that is occupied
for j=j_optm:-1:1
k = grid_isOccupiedBy(i,j); % car index
if k~=UNOCCUPIED
% this is the first occupied point to left of car
% get states of car
xypsi = X_all(i*nx+1:i*nx+3,k);
% find closest intersect point to right track border
new_b_L(i,:) = FindClosestIntersect(Rx,Ry,Lx,Ly,xypsi,carlength,carwidth);
break;
elseif j==1
% has hit track border
new_b_L(i,:) = new_b_default(i,1:2);
end
end
% identify which is first point to right that is occupied
for j=j_optm:grid_width
k = grid_isOccupiedBy(i,j); % car index
if k~=UNOCCUPIED
% this is the first occupied point to right of car
% get states of car
xypsi = X_all(i*nx+1:i*nx+3,k);
% find closest intersect point to left track border
new_b_R(i,:) = FindClosestIntersect(Lx,Ly,Rx,Ry,xypsi,carlength,carwidth);
break;
elseif j==grid_width
% has hit track border
new_b_R(i,:) = new_b_default(i,3:4);
end
end
end
new_b = [new_b_L new_b_R];
http://paulbourke.net/geometry/pointlineplane/