【数据结构】最短路径问题
从一个源点出发求到每一个顶点的最短路径
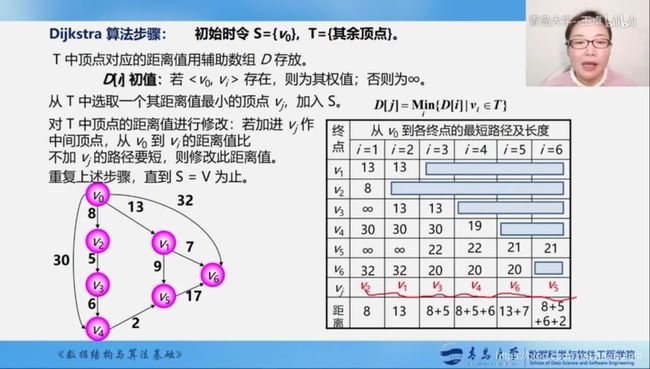
求解这个问题的时候我们用到Dijkstra算法,算法的描述如下:
(1)首先定义一个数组用来存储从源点到每一个顶点的最短路径(不可达用无穷表示),使用S集合来储存已经求得最短路径的顶点,那么剩余顶点就存放在集合T中
(2)第一次迭代的时候S只有源点,然后根据S集合中的顶点来更新最短路径数组D中的值,每次选择不在集合S中且路径最短的顶点加入集合S
(3)根据集合S的顶点更新最短路径,如果D[j] + arc[j][k] < D[k] , 那么D[k] = D[j] + arc[j][k]
(4)执行n-1次(2)和(3)就可以得到源点到所有顶点的最小路径了
一个鲜活的例子
代码实现
//最短路径问题之Dijkstra算法//
typedef int Pathmatirx1[MAXVEX]; //用于记录最短路径所经过的路径下标
typedef int ShortPathTable1[MAXVEX];//用于记录起始点到下标顶点的最短路径权值
//算法主体
void ShortestPath_Dijkstra(MGraph *G, int v0, Pathmatirx1 *P, ShortPathTable1 *D) {
int v, w, k, min;
int final[MAXVEX];//用于记录顶点是否被纳入最短路径,纳入为1,否则为0
for (v = 0; v < G->Vertex_num; v++) {
final[v] = 0;
(*D)[v] = G->arc[v0][v]; //填入v0与各点间的权值
(*P)[v] = 0; //初始化路径
}
//初始化第一个顶点
(*D)[v0] = 0; //第一个顶点到第一个顶点的权值为0
final[v0] = 1; //表示第一个顶点已经加入最短路径
//开始主循环,求v0到各个顶点的最短路径
for (v = 1; v < G->Vertex_num; v++) {
//从1号顶点开始
min = INFINITY;
for (w = 0; w < G->Vertex_num; w++) {
if (final[w] == 0 && (*D)[w] < min) {
//如果这个顶点没有加入最短路径并且v0到这个顶点的路径最短
k = w;
min = (*D)[w];
}
}
//出循环的时候已经找到了目前可以达到的最短路径
final[k] = 1;
//接下来更新最短路径表
for (w = 0; w < G->Vertex_num; w++) {
if (final[w] == 0 && (min + G->arc[k][w]) < (*D)[w]) {
//如果该顶点没有纳入最短路径并且v0到这个顶点路径比之前的要短的话
(*D)[w] = min + G->arc[k][w];//更新最短路径(v0到w)
(*P)[w] = k; //存放前驱顶点(k到w)
}
}
}
//打印最短路径
printf("最短路径为:\n");
for (v = 1; v < G->Vertex_num; v++) {
printf("(%d,%d)\n", (*P)[v], v);
}
}存储方式为邻接矩阵
求每一对顶点之间的最短路径
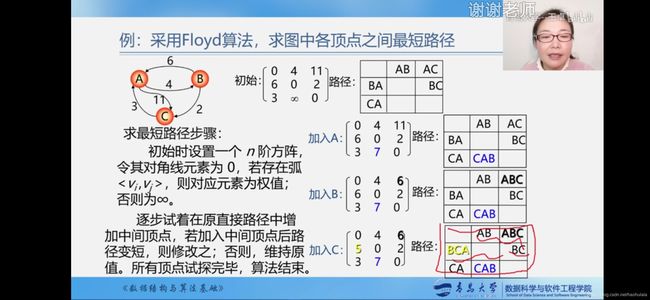
Dijkstra算法的时间复杂度为O(n^3),还有一种时间复杂度也是O(n^3)的算法,叫做Floyd算法。
算法的描述如下:
先初始化一个邻接矩阵用来存储每个路径之间的距离,然后每次加入一个顶点,重新计算每个顶点间的最短路径,知道加入了n个顶点为止,最后得到的矩阵D^(k-1)就是最终得到的最短路径。
我记得离散数学图论中说邻接矩阵的n次方表示每个顶点到每个顶点中间顶点的序号不大于n的最短路径,不知道我有没有记错。
一个鲜活的例子
代码实现
//最短路径问题之Floyd算法//
typedef int Pathmatirx[MAXVEX][MAXVEX];
typedef int ShortPathTable[MAXVEX][MAXVEX];
void ShortestPath_Floyd(MGraph *G, Pathmatirx *P, ShortPathTable *D) {
int v, w, k;
//先初始化距离矩阵和路径矩阵
for (v = 0; v < G->Vertex_num; v++) {
for (w = 0; w < G->Vertex_num; w++) {
(*D)[v][w] = G->arc[v][w]; //直接用权值初始化距离矩阵先
(*P)[v][w] = w; //用终点顶点的下标初始化路径矩阵
}
}
//接下来开始主循环
//最外层循环为中间路径
//中间循环为起始点
//最里层循环为终点
for (k = 0; k < G->Vertex_num; k++) {
for (v = 0; v < G->Vertex_num; v++) {
for (w = 0; w < G->Vertex_num; w++) {
if ((*D)[v][w] > (*D)[v][k] + (*D)[k][w]) {
//如果经过中间点的距离更短的话
(*D)[v][w] = (*D)[v][k] + (*D)[k][w];
(*P)[v][w] = (*P)[v][k]; //这是路径v到w的下一个顶点是v到k所存顶点
}
}
}
}
//打印距离矩阵
printf("距离矩阵为:\n");
printf("\t");
for (v = 0; v < G->Vertex_num; v++) {
printf("V%c\t", G->vexs[v]);
}
printf("\n\n");
for (v = 0; v < G->Vertex_num; v++) {
printf("V%c\t",G->vexs[v]);
for (w = 0; w < G->Vertex_num; w++) {
printf("%d\t", (*D)[v][w]);
}
printf("\n\n");
}
printf("\n\n");
//打印路径矩阵
printf("路径矩阵为:\n\t");
for (v = 0; v < G->Vertex_num; v++) {
printf("V%c\t", G->vexs[v]);
}
printf("\n\n");
for (v = 0; v < G->Vertex_num; v++) {
printf("V%c\t",G->vexs[v]);
for (w = 0; w < G->Vertex_num; w++) {
printf("%d\t", (*P)[v][w]);
}
printf("\n\n");
}
printf("\n");
//打印最短路径
for (v = 0; v < G->Vertex_num; v++) {
for (w = v + 1; w < G->Vertex_num; w++) {
printf("V%d-V%d weight:%d\t", v, w, (*D)[v][w]);
k = (*P)[v][w];
printf("Path:V%d", v);
while (k != w) {
//当k不是终点的时候
printf(" -> V%d", k);//打印下一个顶点
k = (*P)[k][w]; //继续寻找下一个顶点
}
printf(" -> V%d", w);
printf("\n");
}
printf("\n");
}
}