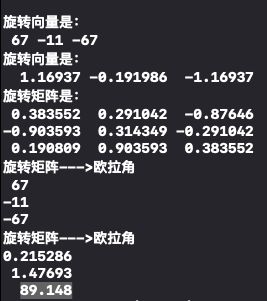
欧拉角和旋转矩阵的转换
参考该处
这里只是纯粹记录一下
#include