图的广度优先遍历和最短路径算法
目录
图的广度优先遍历和最短路径算法
前言
广度优先遍历算法的探讨
核心代码分析
测试用例
完整代码获取
博客文章版权声明
图的广度优先遍历和最短路径算法
前言
上一次,我们讨论了有关图的深度优先遍历算法,既然二叉树有深度遍历算法,图也有深度遍历算法。那么二叉树还有广度优先遍历算法,图又有没有广度优先算法呢?
答案当然是有的。所谓的广度优先遍历与深度优先遍历的不同就体现在“广度”这个词上,“深度优先”遍历算法讲究的是能遍历到多“深”就遍历到多深,完成了“深”的条件在来考虑“广”的条件。而“广度优先”遍历算法就恰恰相反了,“广度”优先遍历体现在一个“广”字上,即一次将某个节点所有的相邻节点都遍历完了,再去“深”度的往下遍历。
广度优先遍历算法的探讨
如果看过我前几篇讲“二叉树的广度遍历”的博文就知道,“广度遍历”要使用一个队列来作为辅助工具。如果没看过但感兴趣的同学可以点击此处跳转到这篇讲“二叉树广度优先遍历”的博文。建议先了解一下二叉树的“广度优先遍历”能够更好的理解图的“广度优先遍历算法”。
下面我们来探讨一下如何实现图的“广度优先遍历算法”。来看下面这张图:
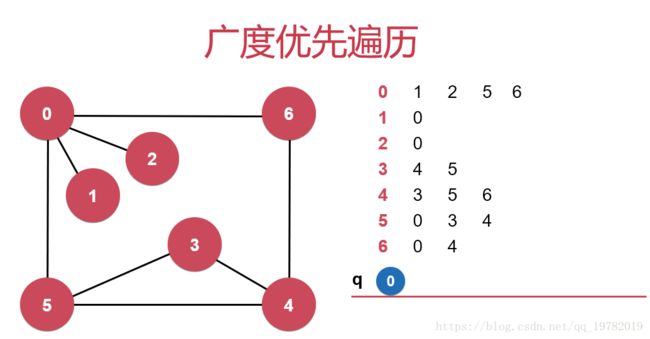
首先,上图左边的是一个简单的无向图,右上方是一个表格,描述了每个节点与之相连的所有邻节点。右下方是一个队列q。还有新增一个ord数组用来计算节点与起始节点之间的距离。首先把起始节点(假设0为起始节点)压入队列中,设置ord[0]=0。标记0节点的visited状态为true,那么此时0节点就已经被遍历了,接下来不能立马让0节点出队列,因为0节点还有一群“跟随”他的邻节点还没入队列呢!所谓的广度优先,就是尽量把节点与之相邻的所有临节点都遍历完再往“深”出去遍历,因此,0节点不仅不能立马出队,还要把他的所有的“邻居节点”都拉进队列里来,他才能安心的离开队列。因为他的邻节点不仅仅是他一个人的邻节点,也有可能是其他节点的邻节点,因此,有可能其他的邻节点已经先把他的部分邻居节点拉入队列中了,所以“拉邻居节点入队列”要排除已经入队列的“邻居节点”,那又如何判断一个节点是否已经进入队列了呢?别忘记了!我们还有一个visited数组记录着呢,任意一个节点只要进入了队列,其visited状态就会置为true。所以,按照这个思路,0节点在出队列之前要把他所有的“邻居节点”中符合条件的节点一起拉入队列中,其中0节点的邻居节点是1,2,5,6,这四个节点的visited状态都为false,所以把他们拉进队伍,并把visited状态置为true,把from[1],from[2],from[5],from[6]都置为0,表示这4个节点都是从0节点遍历过来的。最后,设置ord[1]=ord[0]+1,ord[2]=ord[0]+1,ord[5]=ord[0]+1,ord[6]=ord[0]+1。这样,0节点才完成了他应该完成的所有任务,可以允许出列了!

接下来,队列中的首节点是1号节点,轮到1号节点完成任务了,visited[0]=true,但0号节点已经入队过了,所以没有邻居节点可以被1节点拉进队列了,没有新的节点入队,因此此时不用维护from,ord这两个表了,1节点可以允许出列了。
只要队列不为空,那么队列就可以按照上面的规则一直执行下去,直到队列为空,此时图中所有的节点就都已经入队,并完成了相应的数据维护工作,图的“广度优先遍历”就已经完成了。剩余的部分我用下面动画来演示:
 广度优先遍历算法动画演示
广度优先遍历算法动画演示
核心代码分析
广度优先算法的核心类结构:
using namespace std;
template
class shortPath {
private:
Graph &G;//接受需要检测的图
bool *visited;//visited数组用来记录节点是否被访问过
int s;//s为source的意思。即需要寻路的源(起始)节点
int *ord;//ord为一个记录各节点到原点之间距离的数组
int *from;//数组用来记录每个节点的上一个节点编号 核心类的初始化以及广度优先算法的核心实现代码:
public:
shortPath(Graph &G, int s) : G(G), s(s) {
assert(s >= 0 && s < G.V());
//构造辅助数组
visited = new bool[G.V()];
ord = new int[G.V()];
from = new int[G.V()];
//初始化辅助数组
for (int i = 0; i < G.V(); i++) {
visited[i] = false;
ord[i] = -1;
from[i] = -1;
}
//层序遍历关键代码
queue q;//准备层序遍历关键工具——辅助队列
//初始化基础数据
q.push(s);//源点先入列
visited[s] = true;//只要入列的节点visited状态就标记为true
ord[s] = 0;//源点到源点的距离为0
//利用循环补充剩下的数据
while (!q.empty()) {
int v = q.front();//获取队列首元素
typename Graph::adjIterator adj(G, v);//获取v节点的所有邻节点的迭代器
//把其所有邻节点中未进入队列等待的节点都加入队列中
for (int i = adj.begin(); !adj.end(); i = adj.next()) {
if (!visited[i]) {
q.push(i);
//下面维护节点关系数据
visited[i] = true;//只要成功进入队列的节点就置visited状态为true
from[i] = v;//记录前置节点
ord[i] = ord[v] + 1;//记录距离
}
}
q.pop();//队列首节点所有工作已经全部完成,可以退出队列了
}
} 查询源点到终点之间最短距离的方法实现:
//查询任意一个节点w到源点s之间的最短距离
int length(int w) {
assert(w >= 0 && w < G.V());
return ord[w];
}显示路径的方法和前面讲的深度优先算法的实现是一样的:
//判断两点之间是否有路
bool hasPath(int w) {//w为寻路终点
assert(w >= 0 && w < G.V());
return visited[w];
}
//执行寻路算法
void path(int w, vector &vec) {//传入终点w和一个空的向量vec从来存储路径
assert(w >= 0 && w < G.V());
stack stack1;
while (w != -1) {
stack1.push(w);//把s到w的路径逆序压入栈中,再从栈中取出来时就是顺序了
w = from[w];//起始点s的from[s]一直没被重置过,为初始值-1
}
vec.clear();
while (!stack1.empty()) {//从栈中取出路径,此时的路径为顺序
vec.push_back(stack1.top());//顺序压入向量中
stack1.pop();
}
}
//显示寻路算法算出来的路径
void showPath(int w) {
vector vec;
path(w, vec);//到此时vec从空向量变成了一个存储着路径序列的向量
//控制输出格式
cout << "the route from " << s << " to " << w << " is :" << endl;
for (int i = 0; i != vec.size(); i++) {
if (i == vec.size() - 1) {
cout << vec[i] << endl;
} else {
cout << vec[i] << "->";
}
}
}
测试用例
测试驱动函数如下:
#include
#include
#include
#include
#include "SparseGraph.h"
#include "DenseGraph.h"
#include "Path.h"
#include "shortPath.h"
using namespace std;
int main() {
int N=7;
int end;
DenseGraph g2(N, false);//生成一个无向的稠密图用来进行测试
//添加指定的边用作测试
g2.addEdge(0,1);
g2.addEdge(0,2);
g2.addEdge(0,5);
g2.addEdge(0,6);
g2.addEdge(5,3);
g2.addEdge(5,4);
g2.addEdge(3,4);
g2.addEdge(4,6);
shortPath bfs(g2,0);
end=4;
bfs.showPath(end);
cout<<"the length is:"<
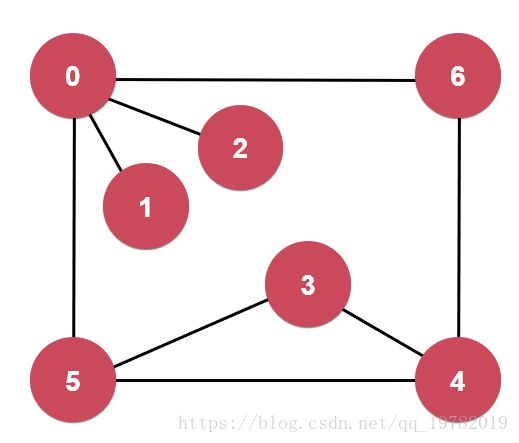
测试用的图结构如下图所示:
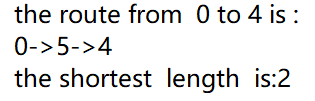
测试结果如下:
修改end的值为6,测试结果如下:

完整代码获取
如需访问完整的工程文件,请点击此处跳转至GitHub。
博客文章版权声明
第一条 本博客文章仅代表作者本人的观点,不保证文章等内容的有效性。
第二条 本博客部分内容转载于合作站点或摘录于部分书籍,但都会注明作/译者和原出处。如有不妥之处,敬请指出。
第三条 在征得本博客作者同意的情况下,本博客的作品允许非盈利性引用,并请注明出处:“作者:____转载自____”字样,以尊重作者的劳动成果。版权归原作/译者所有。未经允许,严禁转载。
第四条 对非法转载者,“扬俊的小屋”和作/译者保留采用法律手段追究的权利。
第五条 本博客之声明以及其修改权、更新权及最终解释权均属“扬俊的小屋”。
第六条 以上声明的解释权归“扬俊的小屋”所有。