直线检测-Radon变换、Hough变换
radon函数对应格式包括:[R,xp] = radon(I,theta);
其中,R为线积分值,xp为径向坐标,theta为投影角度;
图像投影,就是说将图像在某一方向上做线性积分(累加求和)。如果将图像看成二维函数f(x, y),则其投影就是在特定方向上的线性积分,比如f(x, y)在垂直方向上的线性积分就是其在x轴上的投影;f(x, y)在水平方向上的线积分就是其在y轴上的投影。通过这些投影,可以获取图像在指定方向上的突出特性,这在图像模式识别等处理中可能会用到。
Radon(拉东)算法通过定方向投影叠加,可以找到最大投影值时角度,从而确定图像倾斜角度:

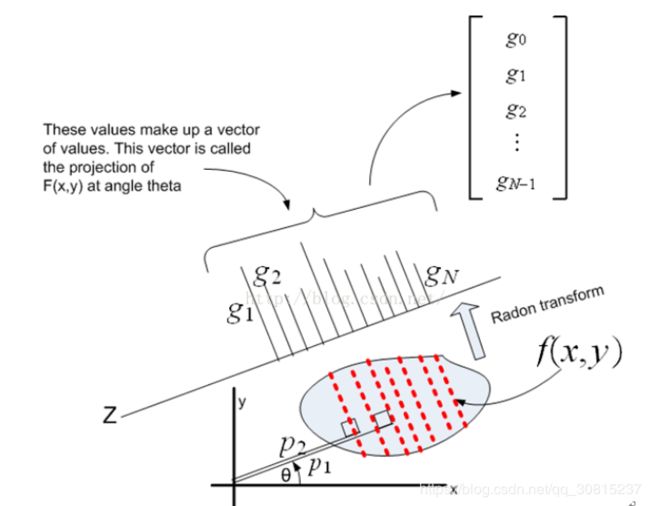
Radon变换(拉东变换),就是将数字图像矩阵在某一指定角度射线方向上做投影变换。这就是说可以沿着任意角度theta来做Radon变换。 radon变换就是图像在不同方向上的投影。下图f(x,y)可以代表图像,R(x')就是图像向右下方的投影。数学上是按投影方向进行线积分,在图像领域就是按照投影方向累加像素就行了。

Radon变换的本质是将原来的XY平面内的点映射到AB平面上,那么原来在XY平面上的一条直线的所有的点在AB平面上都位于同一点。记录AB平面上的点的积累厚度,便可知XY平面上的线的存在性。这便是大家所公认的Radon变换的实质所在。

数学理论
如果我们将图像中心设为原点,用P(直线到原点的距离)和![]() (某一特定方向)代替a、b,即,理解为图像在空间的投影,用参数表示上述直线,则有:
(某一特定方向)代替a、b,即,理解为图像在空间的投影,用参数表示上述直线,则有:
![]()

假定有一个函数f(x,y)代表图像的像素,如上图所示,那么该函数过直线L区域的积分即为:
其中ds是该直线的微分。上述积分可以写为:![]()
因而,给定一组P和![]() ,就可以得出一个沿L(P,
,就可以得出一个沿L(P,![]() )的积分值,即在指定角度上的像素累加和。因此,Radon变换就是函数f (x,y)的线积分,如图所示。假如有很多平行于L的线,他们有相同的\theta,径向坐标P却不同,这就很好的印证了matlab自带的radon变换命令中每个\theta角度的Radon变换结果是有两个输出项R(一个\theta角度下的Radon变换值,即线积分值)与xp(径向坐标),两者一一对应。我们对每一条这样的平行线都做f(x,y)的线积分,会产生很多投影线,也就是说对一幅图像在某一特定角度下的Radon变换会产生N个线积分值,而每一个线积分值会对应一个径向坐标xp,各个角度的Radon变换值汇总在一起就构成一幅Radon变化图。
)的积分值,即在指定角度上的像素累加和。因此,Radon变换就是函数f (x,y)的线积分,如图所示。假如有很多平行于L的线,他们有相同的\theta,径向坐标P却不同,这就很好的印证了matlab自带的radon变换命令中每个\theta角度的Radon变换结果是有两个输出项R(一个\theta角度下的Radon变换值,即线积分值)与xp(径向坐标),两者一一对应。我们对每一条这样的平行线都做f(x,y)的线积分,会产生很多投影线,也就是说对一幅图像在某一特定角度下的Radon变换会产生N个线积分值,而每一个线积分值会对应一个径向坐标xp,各个角度的Radon变换值汇总在一起就构成一幅Radon变化图。
使用Radon变换检测直线,检测步骤如下:
(1)使用边缘检测函数edge函数计算二值图像;
(2)计算二值图像的Radon变换;
(3)寻找Radon变换的局部极大值,这些极大值的位置即为原始图像中直线的位置。
BW = edge(I1);
imshow(BW)
theta = 0:179;
[R,xp] = radon(BW,theta);
figure,imagesc(theta,xp,R)Radon变换用于直线检测,比Hough变换优越的地方在于:Radon变换可以针对非二值图像,Radon变换检测直线:灰度值高的线段会在P 空间中形成亮点,而低灰度值的直线会在P 空间中形成暗点,而Hough变换需要针对二值图像进行,仅仅积攒非0点在某一个上的个数。
from:https://blog.csdn.net/yu132563/article/details/99228303
https://blog.csdn.net/kongxp_1/article/details/81448210
Hough变换
直线的表示方式
对于平面中的一条直线,在笛卡尔坐标系中,常见的有点斜式,两点式两种表示方法。然而在hough变换中,考虑的是另外一种表示方式:使用(r,theta)来表示一条直线。其中r为该直线到原点的距离,theta为该直线的垂线与x轴的夹角。如下图所示。

也就是霍夫变换中表示一条直线的参数变成了(r,theta)。如果对位于同一直线上的n个点进行变换,原图像空间的n个点在参数空间对应得到有n条正弦曲线,并且这些曲线相交于一点。

2.如何判断多个点是否在同一直线上
当我们的对象变成点时,我们知道一个点可以发射出无数条直线,根据霍夫变换的直线表达形式,假设这个点为 i, 则通过这个点的直线我们用(ri,thetai)表示。再假设一个点为 j,则通过点 j 的一系列直线我们用(rj,thetaj)表示。我们知道两点决定一条直线,所以这两个点的直线必定有r_i=r_j,theta_i= theta_j的时候。那如果是三个点呢,假设第三个点是k,则通过k点的一系列直线为(r_k,\theta_k),如果三点在一条直线上,那必定有某个r_i=r_j=r_k = r,theta_i = theta_j= theta_k = theta。
在霍夫变换检测直线时我们需要找到这样一样直线.
3.如何检测出直线
假设有N个点,我们要检测其中的直线,也就是我们要找到具体的r和theata。对于上面所说的每个点可以通过无数条直线,这里我们设为n条(通常 n = 180),则我们一起可以找到N*N个(r, theata),对这N*N个(r,theata),我们可以利用统计学,统计到在theta=某个值theta_i时,多个点的r近似相等于r_i。也就是说这多个点都在直线(r_i,theta_i)上。
4.举例说明
如果空间中有3个点,如何判断这三个点在不在一个直线上,如果在,这条直线的位置为?这个例子中,对于每个点均求过该点的6条直线的(r,theta)坐标,共求了3*6个(r,theta)坐标。可以发现在theta=60时,三个点的r都近似为80.7,由此可判定这三个点都在直线(80.7,60)上。通过 r-o-theta 坐标系可更直观表示这种关系,如下图:图中三个点的(r,theta)曲线汇集在一起,该交点就是同时经过这三个点的直线。

在实际的直线检测情况中,如果超过一定数目的点拥有相同的(r,theta)坐标,那么就可以判定此处有一条直线。在r-O-theta 坐标系图中,明显的交汇点就标示一条检测出的直线。如下图,可以判定出平面上的点共构成了两条直线,即检测出两条直线。

亮点对应笛卡尔坐标系下(图像)的一条直线,越亮,代表在这条直线上的非零像素数越多。(原图像是二值图像,亮度代表像素个数)
霍夫变换直线检测的步骤:
如果一幅图像中的像素构成一条直线,那么这些像素坐标值(x, y)在霍夫空间对应的曲线一定相交于一个点,所以我们只需要将图像中的所有像素点(坐标值)变换成霍夫空间的曲线,并在霍夫空间检测曲线交点就可以确定直线了。
1、对边缘二值化图像进行霍夫空间变换;
2、在4邻域内找到霍夫空间变换的极大值;
3、对这些极大值安装由大到小顺序进行排序,极大值越大,越有可能是直线;
4、输出直线。