移植u-boot-2012.04.01到jz2440开发板
今天我给大家分享一下如何移植一个纯净的uboot到jz2440开发大版,通过记录学习分享,与大家一起进步!!!
1.首先我们在uboot官网下载u-boot-2012.04.01.tar.bz2,建立source insight工程。将下载好的uboot通过FTP服务器传送到虚拟机中的linux系统下。
解压uboot:
tar xjf u-boot-2012.04.01.tar.bz2
cd u-boot-2012.04.01
make smdk2410_config
make
将得到的u-boot.bin文件下载到开发板(下载方式不唯一),连接至串口,发现没有输出。所以我们下载的uboot不支持我们的jz2440开发板,我们接下来应该通过修改uboot源码使它支持我们的开发板。
2.分析u-boot: 得知大概的启动过程如下:
-初始化硬件:关看门狗、设置时钟、设置SDRAM、初始化NAND FLASH
-如果bootloader较大,要把它重定位到SDRAM
-把内核从NAND FLASH 读到 SDRAM
-设置“设置要传给内核的参数”
-跳转要执行的内核
3.修改U-BOOT代码
3.1 建一个单板
cd board/samsung/
cp smdk2410 smdk2440 -rf
cd ../../include/configs/
cp smdk2410.h smdk2440.h
修改boards.cfg:
仿照:
smdk2410 arm arm920t - samsung s3c24x0
添加:
smdk2440 arm arm920t - samsung s3c24x0
重新编译烧写看结果:串口还是没有输出.
阅读代码发现不足:UBOOT里先以60MHZ的时钟计算参数来设置内存控制器,但是MPLL还未设置
处理措施:把MPLL的设置放到start.S里,取消board_early_init_f里对MPLL的设置
操作如下:
在uboot中的start.s中170行有代码如下:
/* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
ldr r0, =CLKDIVN
mov r1, #3
str r1, [r0]这是设置时钟的,我们将这一部分删掉,然后换成如下代码:
/* 2. 设置时钟 */
ldr r0, =0x4c000014
// mov r1, #0x03; // FCLK:HCLK:PCLK=1:2:4, HDIVN=1,PDIVN=1
mov r1, #0x05; // FCLK:HCLK:PCLK=1:4:8
str r1, [r0]
/* 如果HDIVN非0,CPU的总线模式应该从“fast bus mode”变为“asynchronous bus mode” */
mrc p15, 0, r1, c1, c0, 0 /* 读出控制寄存器 */
orr r1, r1, #0xc0000000 /* 设置为“asynchronous bus mode” */
mcr p15, 0, r1, c1, c0, 0 /* 写入控制寄存器 */
#define S3C2440_MPLL_400MHZ ((0x5c<<12)|(0x01<<4)|(0x01))
/* MPLLCON = S3C2440_MPLL_200MHZ */
ldr r0, =0x4c000004
ldr r1, =S3C2440_MPLL_400MHZ
str r1, [r0]
/* 启动ICACHE */
mrc p15, 0, r0, c1, c0, 0 @ read control reg
orr r0, r0, #(1<<12)
mcr p15, 0, r0, c1, c0, 0 @ write it back
在lowlevel_init.S中最后有如下代码:
SMRDATA:
.word (0+(B1_BWSCON<<4)+(B2_BWSCON<<8)+(B3_BWSCON<<12)+(B4_BWSCON<<16)+(B5_BWSCON<<20)+(B6_BWSCON<<24)+(B7_BWSCON<<28))
.word ((B0_Tacs<<13)+(B0_Tcos<<11)+(B0_Tacc<<8)+(B0_Tcoh<<6)+(B0_Tah<<4)+(B0_Tacp<<2)+(B0_PMC))
.word ((B1_Tacs<<13)+(B1_Tcos<<11)+(B1_Tacc<<8)+(B1_Tcoh<<6)+(B1_Tah<<4)+(B1_Tacp<<2)+(B1_PMC))
.word ((B2_Tacs<<13)+(B2_Tcos<<11)+(B2_Tacc<<8)+(B2_Tcoh<<6)+(B2_Tah<<4)+(B2_Tacp<<2)+(B2_PMC))
.word ((B3_Tacs<<13)+(B3_Tcos<<11)+(B3_Tacc<<8)+(B3_Tcoh<<6)+(B3_Tah<<4)+(B3_Tacp<<2)+(B3_PMC))
.word ((B4_Tacs<<13)+(B4_Tcos<<11)+(B4_Tacc<<8)+(B4_Tcoh<<6)+(B4_Tah<<4)+(B4_Tacp<<2)+(B4_PMC))
.word ((B5_Tacs<<13)+(B5_Tcos<<11)+(B5_Tacc<<8)+(B5_Tcoh<<6)+(B5_Tah<<4)+(B5_Tacp<<2)+(B5_PMC))
.word ((B6_MT<<15)+(B6_Trcd<<2)+(B6_SCAN))
.word ((B7_MT<<15)+(B7_Trcd<<2)+(B7_SCAN))
.word ((REFEN<<23)+(TREFMD<<22)+(Trp<<20)+(Trc<<18)+(Tchr<<16)+REFCNT)
.word 0x32
.word 0x30
.word 0x30
将其删掉改为:
.long 0x22011110 //BWSCON
.long 0x00000700 //BANKCON0
.long 0x00000700 //BANKCON1
.long 0x00000700 //BANKCON2
.long 0x00000700 //BANKCON3
.long 0x00000700 //BANKCON4
.long 0x00000700 //BANKCON5
.long 0x00018005 //BANKCON6
.long 0x00018005 //BANKCON7
.long 0x008C04F4 // REFRESH
.long 0x000000B1 //BANKSIZE
.long 0x00000030 //MRSRB6
.long 0x00000030 //MRSRB7重新编译烧写看看什么情况:编译烧写成功,启动串口,输出打印乱码如下(至少有打印了,说明我们已经成功了第一步,哈哈哈):
![]()
3.1下面解决串口打印乱码问题:
查看串口波特率的设置,在arch\arm\lib中有函数board_init_f,其中有一个结构体init_sequence:
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();跳转到这个结构体:
init_fnc_t *init_sequence[] = {
#if defined(CONFIG_ARCH_CPU_INIT)
arch_cpu_init, /* basic arch cpu dependent setup */
#endif
#if defined(CONFIG_BOARD_EARLY_INIT_F)
board_early_init_f,
#endif
#ifdef CONFIG_OF_CONTROL
fdtdec_check_fdt,
#endif
timer_init, /* initialize timer */
#ifdef CONFIG_FSL_ESDHC
get_clocks,
#endif
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
#if defined(CONFIG_DISPLAY_CPUINFO)
print_cpuinfo, /* display cpu info (and speed) */
#endif
#if defined(CONFIG_DISPLAY_BOARDINFO)
checkboard, /* display board info */
#endif
#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)
init_func_i2c,
#endif
dram_init, /* configure available RAM banks */
NULL,
};
里面是各种初始化,找到串口初始化:serial_init,跳转到这里:
int serial_init(void)
{
return serial_init_dev(UART_NR);
}
#endif然后跳转到这里:serial_init_dev
/* Initialise the serial port. The settings are always 8 data bits, no parity,
* 1 stop bit, no start bits.
*/
static int serial_init_dev(const int dev_index)
{
struct s3c24x0_uart *uart = s3c24x0_get_base_uart(dev_index);
#ifdef CONFIG_HWFLOW
hwflow = 0; /* turned off by default */
#endif
/* FIFO enable, Tx/Rx FIFO clear */
writel(0x07, &uart->ufcon);
writel(0x0, &uart->umcon);
/* Normal,No parity,1 stop,8 bit */
writel(0x3, &uart->ulcon);
/*
* tx=level,rx=edge,disable timeout int.,enable rx error int.,
* normal,interrupt or polling
*/
writel(0x245, &uart->ucon);
#ifdef CONFIG_HWFLOW
writel(0x1, &uart->umcon); /* rts up */
#endif
/* FIXME: This is sooooooooooooooooooo ugly */
#if defined(CONFIG_ARCH_GTA02_v1) || defined(CONFIG_ARCH_GTA02_v2)
/* we need auto hw flow control on the gsm and gps port */
if (dev_index == 0 || dev_index == 1)
writel(0x10, &uart->umcon);
#endif
_serial_setbrg(dev_index);
return (0);
}
然后跳转到这里:_serial_setbrg
void _serial_setbrg(const int dev_index)
{
struct s3c24x0_uart *uart = s3c24x0_get_base_uart(dev_index);
unsigned int reg = 0;
int i;
/* value is calculated so : (int)(PCLK/16./baudrate) -1 */
reg = get_PCLK() / (16 * gd->baudrate) - 1;
writel(reg, &uart->ubrdiv);
for (i = 0; i < 100; i++)
/* Delay */ ;
}
跳转到:get_PCLK
ulong get_PCLK(void)
{
struct s3c24x0_clock_power *clk_power = s3c24x0_get_base_clock_power();
return (readl(&clk_power->clkdivn) & 1) ? get_HCLK() / 2 : get_HCLK();
}跳转到这里:get_HCLK
ulong get_HCLK(void)
{
struct s3c24x0_clock_power *clk_power = s3c24x0_get_base_clock_power();
#ifdef CONFIG_S3C2440
switch (readl(&clk_power->clkdivn) & 0x6) {
default:
case 0:
return get_FCLK();
case 2:
return get_FCLK() / 2;
case 4:
return (readl(&clk_power->camdivn) & (1 << 9)) ?
get_FCLK() / 8 : get_FCLK() / 4;
case 6:
return (readl(&clk_power->camdivn) & (1 << 8)) ?
get_FCLK() / 6 : get_FCLK() / 3;
}我们会发现#ifdef CONFIG_S3C2440 这一句是黑色的,说明没有定义这个CONFIG_S3C2440,
处理措施:
在include/configs/smdk2440.h: 去掉CONFIG_S3C2410 ,换成CONFIG_S3C2440
#define CONFIG_S3C2440
定义好这个之后,重新编译,发现编译有错误如下:
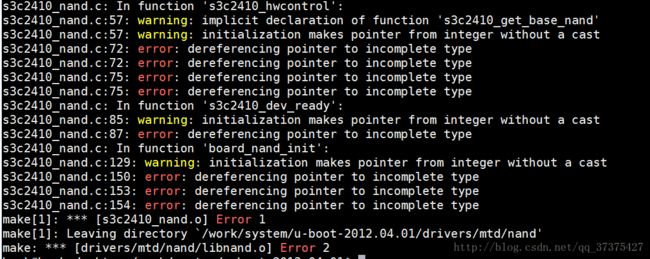
错误显示有大量关于nand的错误,猜想原因应该是此uboot暂时不支持该单板,我决定先把nand去掉,先看看串口是否可以正常打印出不是乱码的消息,之后再加入nand的支持,要一步一步来嘛!我们把关于nand的编译选项去掉,查看/drivers/mtd/nand/Makefile,找到只一句:
COBJS-$(CONFIG_NAND_S3C2410) += s3c2410_nand.o
说明编译s3c2410_nand.c以来的定义是:CONFIG_NAND_S3C2410,在源码中搜索CONFIG_NAND_S3C2410,在smdk2440.h中找到:
#ifdef CONFIG_CMD_NAND
#define CONFIG_NAND_S3C2410
#define CONFIG_SYS_S3C2410_NAND_HWECC
#define CONFIG_SYS_MAX_NAND_DEVICE 1
#define CONFIG_SYS_NAND_BASE 0x4E000000
#endif说明定义了CONFIG_CMD_NAND则CONFIG_NAND_S3C2410就被定义,我们只需要让CONFIG_CMD_NAND不被定义即可,搜索到如下:
#define CONFIG_CMD_NAND
将其改为:
//#define CONFIG_CMD_NAND
重新编译,没有出现错误,烧写测试串口输出为:

哈哈哈!!!!,串口终于输出而且不是乱码了,我们已经走出了第一步,接下来就是让它支持nand flash了,也不是容易的事情啊,已经写了这么多了,就放到下一篇 博客中吧!!!
想跟我一起交流学的加我
qq:1126137994
二维码:

微信:liu1126137994
二维码:

备注:交流学习哦
另外我这里有大量的学习资料,以及现成的项目的经验总结,欢迎叨扰!!!