并发容器集合ConcurrentHashMap
前序
在java.util包下提供了一些线程安全的容器类,如Vector和HashTable。但这些容器是通过sychronized实现实现同步,这样读写均需要锁操作,导致性能低下。Java提供了一些代替同步容器的并发容器,使用这些容器可以提高并发访问性。
ConcurrentMap接口
ConcurrentMap接口继承了Map接口,在Map接口的基础上又定义了4个方法:
public interface ConcurrentMap extends Map {
//插入元素
/*
与原有的put方法不同在于:该方法中若插入的key值不同,则不替换原有的value值
*/
V putIfAbsent(K key, V value);
//移除元素
/*
与原有的remove方法不同在于:该方法增加了对value的判断,如果要删除的key-value
不能与Map中原有的key-value对应上,则不会删除该元素;
*/
boolean remove(Object key, Object value);
//替换元素.
/*
该方法增加了对value的判断,如果key-value
能与Map中原有的key-value对应上,才进行替换操作;
*/
boolean replace(K key, V oldValue, V newValue);
//替换元素
/*
与上面方法不同的是:该方法不会对Map中原有的key-value进行比较,若key存在则直接替换
*/
V replace(K key, V value);
}
ConcurrentHashMap类
线程不安全的HashMap
在并发编程中使用HashMap可能导致程序死循环,这是因为多线程会导致HashMap的Entry链表形成环形数据结构,即Entry的next节点永不为空,进而产生死循环获取Entry。
效率低下的HashTable
HashTable容器使用synchronized来保证线程安全,当一个线程访问HashTable的同步方法,其他线程会被进入阻塞或轮询状态,如线程1使用put进行元素添加,线程2不但不能使用put方 法添加元素,也不能使用get方法来获取元素,所以竞争越激烈效率越低。
ConcurrentHashMap的锁分段技术
HashTable效率低下的原因是所有访问HashTable的 线程都必须竞争同一把锁,而ConcurrentHashMap的锁分段技术将数据分成一段一段的存储,给每一段数据配一把锁,这样当一个线程占用锁访问其中一个段数据的时候,其他段的数 据也能被其他线程访问。
JDK 1.7下的ConcurrentHashMap
ConcurrentHashMap在JDK 1.7中采用了数组+Segment+分段锁的方式实现,Segment是一个继承自ReentrantLock的锁,Segment数组维护了HashEntry的数组table。HashEntry本质是一个K-V存储结构,内部存储了目标对象的Key和Value,同时HashEntry也是一个链式结构,内部维护了下一个HashEntry的变量next。
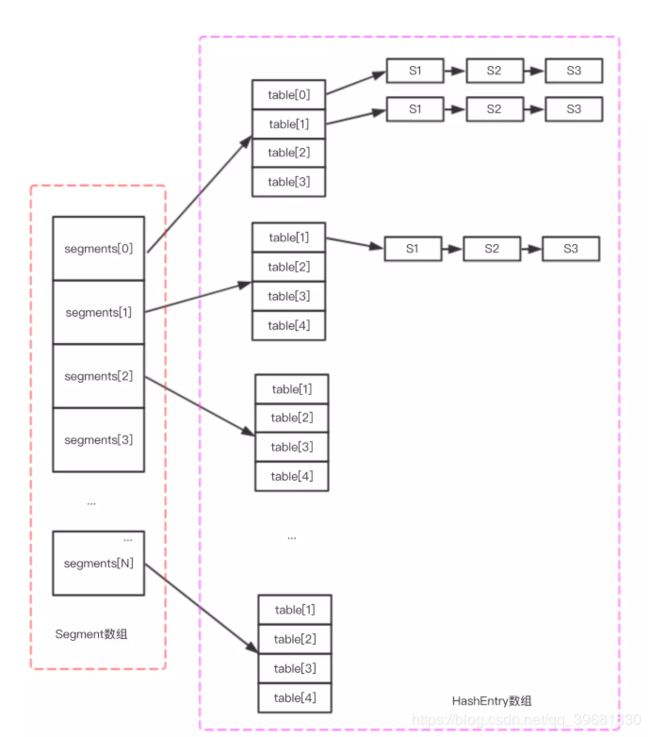
分段锁机制将数据分段,对每一段数据分配一把锁,当一个线程占用锁访问其中一个段数据的时候,其他段的数据也能被其他线程访问。对于一些方法需要跨段,比如说size()、isEmpty()、containsValue(),它们可能需要锁定整个表而非某个段,因此需要按顺序锁定所有段,操作完后按顺序释放所有的锁。
ConcurrentHashMap大致结构
public class ConcurrentHashMap extends AbstractMap
implements ConcurrentMap, Serializable {
static final int DEFAULT_INITIAL_CAPACITY = 16;
/**
* 默认的负载因子为0.75
*/
static final float DEFAULT_LOAD_FACTOR = 0.75f;
static final int DEFAULT_CONCURRENCY_LEVEL = 16;
final Segment[] segments;
static final class Segment extends ReentrantLock implements Serializable {
transient volatile HashEntry[] table;
...
}
static final class HashEntry {
final int hash;
final K key;
volatile V value;
volatile HashEntry next;
}
}
ConcurrentHashMap的初始化
public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// Find power-of-two sizes best matching arguments
int sshift = 0;
int ssize = 1;
//设置segments数组长度
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
this.segmentShift = 32 - sshift;
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
//计算每一个segment中table的数量cap
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// create segments and segments[0]
Segment s0 =
new Segment(loadFactor, (int)(cap * loadFactor),
(HashEntry[])new HashEntry[cap]);
Segment[] ss = (Segment[])new Segment[ssize];
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
} 我们将构造函数分为两部分:
(1)设置segments数组长度
构造函数中第三个参数concurrencyLevel默认为DEFAULT_CONCURRENCY_LEVEL的值 ,即16。
Segment数组的最终大小ssize一定是大于或等于concurrentLevel的最小的2的次幂。
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
int sshift = 0;
/*
当我们put进一个key-value对象HashEntry时,是通过key的哈希码 & segments[].length - 1来得到
放入segments数组的下标值。因此我们需要控制segments数组的大小要大于等于concurrencyLevel
的最小2的n次方数
*/
int ssize = 1;
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
segmentShift = 32 - sshift;
// segmentMask = segments[].length - 1
segmentMask = ssize - 1;
this.segments = Segment.newArray(ssize);(2)初始化每个segment中的HashEntry数组数量
方法的第一个参数initialCapacity默认为DEFAULT_INITIAL_CAPACITY 的值,即16,它表示HashEntry数组的总共大小,ssize则是segment数组大小。
变量c = initialCapacity / ssize,它表示每个segment的HashEntry数组数量。如果c大于1,就会取大于等于c的2的N次方值,因此cap最小为2,即每个segment最少有两个HashEntry数组
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
int cap = 1;
while (cap < c)
cap <<= 1;
for (int i = 0; i < this.segments.length; ++i)
this.segments[i] = new Segment(cap, loadFactor);
put操作
put操作主要分为两步:
(1)定位到放入segment数组的下标j,并确保该位置已被初始化;
(2)调用segment的put方法
public V put(K key, V value) {
Segment s;
if (value == null)
throw new NullPointerException();
int hash = hash(key);
int j = (hash >>> segmentShift) & segmentMask;
if ((s = (Segment)UNSAFE.getObject
(segments, (j << SSHIFT) + SBASE)) == null)
s = ensureSegment(j);
return s.put(key, hash, value, false);
}
然后是segment对象的put方法:
(1)由于put方法需要对共享变量进行写入操作,因此需要加锁。该节点通过tryLock()方法尝试加锁,若不成功表示当前锁已被其他线程持有,则执行scanAndLockForPut()方法:在scanAndLockForPut方法中,会通过重复执行tryLock()方法尝试获取锁,如果执行tryLock()方法次数超过上限后,会执行lock()方法挂起当前线程,等待其他线程unlock()。
(2)根据HashEntry[].length - 1 & hash来得到HashEntry数组的下标index,然后放入对应的HashEntry数组里。
(3)判断Segment里的HashEntry数组是否超过阈值(threshold),如果超过,则对数组进行扩容。
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
HashEntry node = tryLock() ? null :
scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry[] tab = table;
int index = (tab.length - 1) & hash;
HashEntry first = entryAt(tab, index);
for (HashEntry e = first;;) {
if (e != null) {
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
e = e.next;
}
else {
if (node != null)
node.setNext(first);
else
node = new HashEntry(hash, key, value, first);
int c = count + 1;
//若c超出阈值threshold,需要扩容并rehash。
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node);
else
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}
get方法
由于get方法只需要读且涉及到的共享变量都使用volatile修饰,因此无需加锁。
public V get(Object key) {
Segment s;
HashEntry[] tab;
int h = hash(key);
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
//先定位Segment,再定位HashEntry
if ((s = (Segment)UNSAFE.getObjectVolatile(segments, u)) != null &&
(tab = s.table) != null) {
for (HashEntry e = (HashEntry) UNSAFE.getObjectVolatile
(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}
JDK 1.8下的ConcurrentHashMap
JDK1.8的ConcurrentHashMap采用的节点Node数组+链表/红黑树+CAS+synchronized来保证并发安全。
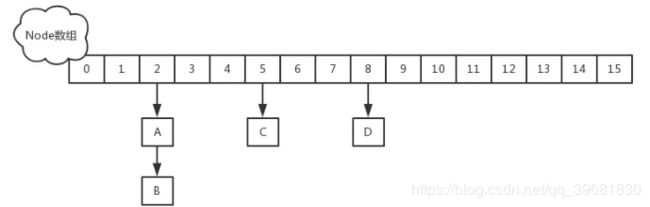
ConcurrentHashMap的大致结构如下。
(1)Node类包装了key-value键值对,所有插入ConcurrentHashMap的数据都包装在这里面。它不允许调用setValue方法直接改变Node的value域。
(2)当链表长度过长的时候,会转换为TreeNode。与HashMap不相同的是,它并不是直接转换为红黑树,而是把这些结点包装成TreeNode放在TreeBin对象中,由TreeBin完成对红黑树的包装。TreeNode继承自Node类。
(3)TreeBin类负责包装很多的TreeNode节点,在实际的ConcurrentHashMap“数组”中,存放的是TreeBin对象,而不是TreeNode对象。
(4)ForwardingNode类用于连接两个table,它包含一个nextTable指针,用于指向下一张表。
public class ConcurrentHashMap extends AbstractMap
implements ConcurrentMap, Serializable {
static final int MOVED = -1; // hash值是-1,表示这是一个forwardNode节点
static final int TREEBIN = -2; // hash值是-2 表示这时一个TreeBin节点
//当插入新数据put()或则删除数据remove()时,会通过addCount()方法更新baseCount
private transient volatile long baseCount;
private transient volatile CounterCell[] counterCells;
transient volatile Node[] table;
/**
* 控制标志符
* 负数: 代表正在进行初始化或扩容操作,其中-1表示正在初始化,-N 表示有N-1个线程正在进行扩容操作
* 正数或0: 代表hash表还没有被初始化,这个数值表示初始化或下一次进行扩容的大小,类似于扩容阈值
* 它的值始终是当前ConcurrentHashMap容量的0.75倍,这与loadfactor是对应的。
* 实际容量 >= sizeCtl,则扩容
*/
private transient volatile int sizeCtl;
...
static class Node implements Map.Entry {
final int hash;
final K key;
volatile V val;
volatile Node next;
...
}
static final class TreeNode extends Node {
TreeNode parent; // red-black tree links
TreeNode left;
TreeNode right;
TreeNode prev; // needed to unlink next upon deletion
boolean red;
...
}
static final class TreeBin extends Node {
TreeNode root;
volatile TreeNode first;
volatile Thread waiter;
volatile int lockState;
// values for lockState
static final int WRITER = 1; // set while holding write lock
static final int WAITER = 2; // set when waiting for write lock
static final int READER = 4; // increment value for setting read lock
...
}
static final class ForwardingNode extends Node {
final Node[] nextTable;
...
}
}
初始化方法initTable
对于ConcurrentHashMap来说,调用它的构造方法仅仅是设置了一些参数。而整个table的初始化是在向ConcurrentHashMap中插入元素时发生的。如调用put、computeIfAbsent、compute、merge等方法的时候。
初始化方法主要用了sizeCtl 变量,若该变量小于0,表示其他线程正在进行初始化,则通过yield方法让出CPU。如果获得了初始化权限,就用CAS方法将sizeCtl置为-1,防止其他线程进入。初始化数组后,将sizeCtl的值改为0.75*n。
private final Node[] initTable() {
Node[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
//sizeCtl表示有其他线程正在进行初始化操作,把线程挂起。
//对于table的初始化工作,只能有一个线程在进行。
if ((sc = sizeCtl) < 0)
Thread.yield(); // lost initialization race; just spin
////利用CAS方法把sizectl的值置为-1 表示本线程正在进行初始化
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node[] nt = (Node[])new Node[n];
table = tab = nt;
sc = n - (n >>> 2);//相当于0.75*n 设置一个扩容的阈值
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}
扩容方法 transfer
什么时候扩容
当往hashMap中成功插入一个key/value节点时,有可能触发扩容动作:
(1)桶中链表长度达到阔值8,但整个ConcurrentHashMap节点数量小于64
(2)新增节点之后,整个ConcurrentHashMap节点数量超过阈值。
扩容操作分为两步骤:
- 构建一个容量是原来两倍的nextTable,此步骤是单线程完成的;
- 将原来table中的元素复制到nextTable中,此步骤允许多线程进行操作。
private final void transfer(Node[] tab, Node[] nextTab) {
int n = tab.length, stride;
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE; // subdivide range
if (nextTab == null) { // initiating
try {
@SuppressWarnings("unchecked")
// 创建node数组,容量为当前的两倍
Node[] nt = (Node[])new Node[n << 1];
nextTab = nt;
} catch (Throwable ex) { // try to cope with OOME
// 若扩容时出现OOM异常,则将阈值设为最大,表明不支持扩容
sizeCtl = Integer.MAX_VALUE;
return;
}
nextTable = nextTab;
transferIndex = n;
}
int nextn = nextTab.length;
// 创建ForwardingNode节点,作为标记位,表明当前位置桶已做过处理
ForwardingNode fwd = new ForwardingNode(nextTab);
boolean advance = true;
boolean finishing = false;
for (int i = 0, bound = 0;;) {
Node f; int fh;
while (advance) {
int nextIndex, nextBound;
if (--i >= bound || finishing)
advance = false;
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
//通过CAS设置transferIndex属性值,并初始化i和bound值
//i指当前处理的槽位序号,bound指需要处理的槽位边界
//先处理最后一个桶的节点;
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
// 将原数组中节点复制到新数组中去
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
//如果所有的节点都已经完成复制工作 就把nextTable赋值给table 清空临时对象nextTable
if (finishing) {
nextTable = null;
table = nextTab;
//设置新扩容阈值
sizeCtl = (n << 1) - (n >>> 1);
return;
}
//利用CAS方法更新扩容阈值,在这里面sizectl值减一,说明新加入一个线程参与到扩容操作
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
finishing = advance = true;
i = n; // recheck before commit
}
}
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd);
else if ((fh = f.hash) == MOVED)
advance = true; // already processed
else {
//锁住i位置上桶的节点
synchronized (f) {
//确保f是i位置上桶的节点
if (tabAt(tab, i) == f) {
Node ln, hn;
//当前桶是链式结构
if (fh >= 0) {
//构造两个链表
int runBit = fh & n;
Node lastRun = f;
//类似于1.8HashMap,只需要看新增的1bit是0还是1进行分类
for (Node p = f.next; p != null; p = p.next) {
//n是就数组长度,不是长度-1
int b = p.hash & n;
if (b != runBit) {
runBit = b;
lastRun = p;
}
}
if (runBit == 0) {
ln = lastRun;
hn = null;
}
else {
hn = lastRun;
ln = null;
}
for (Node p = f; p != lastRun; p = p.next) {
int ph = p.hash; K pk = p.key; V pv = p.val;
if ((ph & n) == 0)
ln = new Node(ph, pk, pv, ln);
else
hn = new Node(ph, pk, pv, hn);
}
//在nextTable的i位置上插入一个链表
setTabAt(nextTab, i, ln);
//在nextTable的i+n的位置上插入另一个链表
setTabAt(nextTab, i + n, hn);
//在table的i位置上插入forwardNode节点 表示已经处理过该节点
setTabAt(tab, i, fwd);
//设置advance为true 返回到上面的while循环中 就可以执行i--操作
advance = true;
}
//当前桶是红黑树结构,操作和上面的类似
else if (f instanceof TreeBin) {
TreeBin t = (TreeBin)f;
TreeNode lo = null, loTail = null;
TreeNode hi = null, hiTail = null;
int lc = 0, hc = 0;
for (Node e = t.first; e != null; e = e.next) {
int h = e.hash;
TreeNode p = new TreeNode
(h, e.key, e.val, null, null);
if ((h & n) == 0) {
if ((p.prev = loTail) == null)
lo = p;
else
loTail.next = p;
loTail = p;
++lc;
}
else {
if ((p.prev = hiTail) == null)
hi = p;
else
hiTail.next = p;
hiTail = p;
++hc;
}
}
//如果扩容后已经不再需要tree的结构 反向转换为链表结构
ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) :
(hc != 0) ? new TreeBin(lo) : t;
hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) :
(lc != 0) ? new TreeBin(hi) : t;
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
setTabAt(tab, i, fwd);
advance = true;
}
}
}
}
}
}
get方法
public V get(Object key) {
Node[] tab; Node e, p; int n, eh; K ek;
//计算hash值
int h = spread(key.hashCode());
//根据key.hashCode & table[].length - 1来确定节点位置,
//通过tabAt方法获取该位置的Node节点e,判断节点类型
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
//桶首节点的key与查找的key相同,再判断一下key是否相同
if ((eh = e.hash) == h) {
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
return e.val;
}
//如果节点e的哈希值eh小于0,表示它是一个树节点
else if (eh < 0)
return (p = e.find(h, key)) != null ? p.val : null;
//否则是一个链表节点
while ((e = e.next) != null) {
if (e.hash == h &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}
put方法
大致流程为:
(1)由于ConcurrentHashMap不允许key或value为null,因此首先判断key和value是否为null。这是因为ConcurrentHashMap支持并发,如果通过get(key)获取对应的value是null时,我们无法区分它是put(key,value)的时候value就是null,还是key没有映射的情况。HashMap是非并发的,可以通过contains(key)来做这个判断;而支持并发的Map在调用map.contains(key)和map.get(key),map可能已经变化了。
(2)重新计算hash值,然后判断当前table是否为空,若为空则初始化table。通过table.length - 1 & hash 得到位置i。通过tabAt方法获取对应位置节点,若没有节点则则直接添加新节点。
(3)判断得到的节点类型,若是ForwardingNode节点,表明有其它线程正在扩容,则一起进行扩容操作;若是链表或树节点,则按照不同的方式插入或更新节点。
(4)若新增节点后链表长度大于8,就把这个链表转换成红黑树。然后节点数量+1,校验是否超过阈值,若超过则扩容。
public V put(K key, V value) {
return putVal(key, value, false);
}
final V putVal(K key, V value, boolean onlyIfAbsent) {
//ConcurrentHashMap不允许key或value为null
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode());
int binCount = 0;
for (Node[] tab = table;;) {
Node f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
tab = initTable();
//若table.length - 1 & hash得出的位置i上的节点为null,则CAS插入新Node节点。
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
if (casTabAt(tab, i, null,
new Node(hash, key, value, null)))
break; // no lock when adding to empty bin
}
// 若当前正在扩容
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
// 锁住当前位置i的节点f
synchronized (f) {
// 为防止之前被其他线程修改,需要判断节点f是否为数组下标i的节点。
if (tabAt(tab, i) == f) {
// 如果当前节点是链表节点
if (fh >= 0) {
binCount = 1;
for (Node e = f;; ++binCount) {
K ek;
//若hash值与key值相同,则替换旧值
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node pred = e;
//若链表中找不到,在链表尾部插入界定啊
if ((e = e.next) == null) {
pred.next = new Node(hash, key,
value, null);
break;
}
}
}
//若节点f是树节点,则遍历红黑树
else if (f instanceof TreeBin) {
Node p;
binCount = 2;
if ((p = ((TreeBin)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
//若链表长度超过默认值8,将链表转为红黑树
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
//节点数+1,若超过阈值则扩容
addCount(1L, binCount);
return null;
}
size方法
在多线程环境下,ConcurrentHashMap的table数量是不确定的,因此该方法返回的是个估计值。
其中元数个数保存在baseCount,部分元素的变化个数保存在CounterCell数组counterCells中,通过累加baseCount和CounterCell数组中的数量,即可得到元素的总个数;
public int size() {
long n = sumCount();
return ((n < 0L) ? 0 :
(n > (long)Integer.MAX_VALUE) ? Integer.MAX_VALUE :
(int)n);
}
final long sumCount() {
CounterCell[] as = counterCells; CounterCell a;
long sum = baseCount;
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
参考资料
https://www.cnblogs.com/duanxz/archive/2012/10/08/2714933.html
https://juejin.im/post/5b53d1adf265da0f70070e3d#heading-0