A Singularly Valuable Decomposition(SVD奇异值分解)
A Singularly Valuable Decomposition(SVD奇异值分解)
SVD与熟悉的对称矩阵对角化理论密切相关。 如果A是对称实数n×n矩阵,则存在正交矩阵V和对角线D,使得A=![]() 。 这里V的列是A的特征向量,并形成Rn的正交基; D的对角线上的数值是A的特征值。为了强调与SVD的联系,我们将
。 这里V的列是A的特征向量,并形成Rn的正交基; D的对角线上的数值是A的特征值。为了强调与SVD的联系,我们将![]() 称为A的特征值分解或EVD。
称为A的特征值分解或EVD。
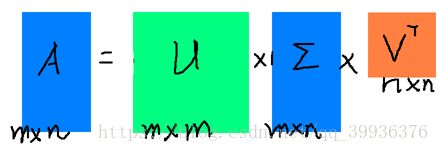
对于SVD,任意一个实数m×n矩阵A,存在正交矩阵U和V以及一个对角矩阵,这次表示为Σ,使得A = ![]() 。 在这种情况下,U是m×m矩阵,V是n×n矩阵,所以Σ是与A的尺寸相同的矩形。Σ的对角线上的数值,即Σii=σi,可以排列成非负的并且是按幅度减小的顺序排列的。正数值σi称为A的奇异值,U和V的列称为A的左和右奇异向量。
。 在这种情况下,U是m×m矩阵,V是n×n矩阵,所以Σ是与A的尺寸相同的矩形。Σ的对角线上的数值,即Σii=σi,可以排列成非负的并且是按幅度减小的顺序排列的。正数值σi称为A的奇异值,U和V的列称为A的左和右奇异向量。
下面先介绍一下特征值(EVD)分解:![]()
![]()
如果说一个向量v是方阵A的特征向量,将一定可以表示成![]() ,这时候被称为特征向量v对应的特征值。
,这时候被称为特征向量v对应的特征值。
一个矩阵的一组特征向量是一组正交向量。特征分解是将一个矩阵分解成A = ![]() ,其中V是这个矩阵A的特征向量组成的矩阵,D是一个对角矩阵,每个对角矩阵上的元素就是一个特征值。
,其中V是这个矩阵A的特征向量组成的矩阵,D是一个对角矩阵,每个对角矩阵上的元素就是一个特征值。
一个矩阵变换可以看成为一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。举例如下:
eg1. 矩阵M如下:
它对应的线性变换如下面形式:
用图形描述为:
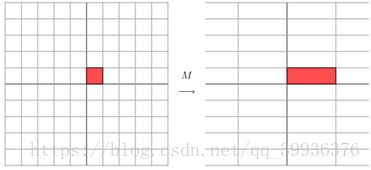
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时拉长,当值<1时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
eg2.
它所描述的变换的图形描述为:
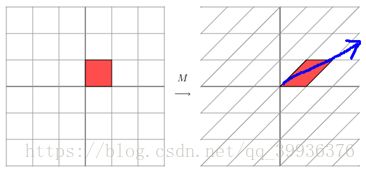
这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示),在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的D矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)。
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。
总结:特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
奇异值(SVD)分解:
由于特征值分解有局限性,它的变换的矩阵必须是方阵,所以引入了特征值分解。特征值分解的矩阵可以是任意的方阵。
任意一个实数m×n矩阵A,存在正交矩阵U和V以及一个对角矩阵,这次表示为Σ,使得A = ![]() 。
。
分析一下SVD怎么和EVD相对应的:
我们将一个矩阵A的转置![]() 与A相乘,将会得到一个方阵
与A相乘,将会得到一个方阵![]() (nxn维),我们用这个方阵求特征值可以得到:
(nxn维),我们用这个方阵求特征值可以得到:
![]()
这里的v就是上面的右奇异向量;
此外还可以得到![]() ,这里的σ就是上面说的奇异值;
,这里的σ就是上面说的奇异值;
![]() , u就是上面说的左奇异向量。其中ui是Avi方向上的单位向量。
, u就是上面说的左奇异向量。其中ui是Avi方向上的单位向量。
分析可以用一个2x2的矩阵进行分析:
eg3.
这就是SVD在2x2矩阵下的几何学本质:对于任意的2x2矩阵,我们能找到一个正交的网格(grid),它被转换到了另外一个正交网格。
我们使用向量来描述这个现象:如果我们通过某种方式挑出两个单位向量(unit vector)v1和v2,它们是正交的,向量Mv1 和Mv2 也是正交的。
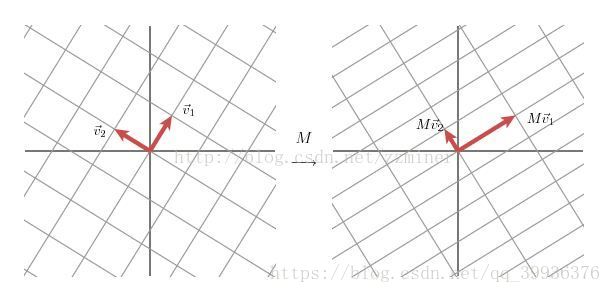
我们用u1和u2代表向量Mv1 和Mv2 方向的单位向量,用σ1 andσ2代表向量Mv1 和Mv2的长度,它们描述网格在这些方向上的拉伸量。
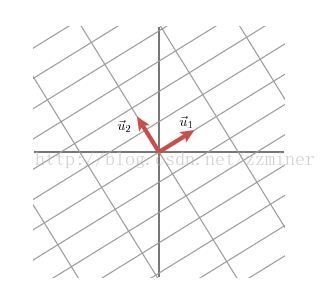
因此我们有 :Mv1 = σ1u1 , Mv2 = σ2u2 。
现在简单说一下矩阵M是如何处理普通向量x的。因为单位向量v1和v2是正交的(形成了一规范正交基,orthonomal basis),所以我们有:x = (v1∙x)v1 + (v2∙x)v2 (注释:x ∙v1 = (v1∙x) v1∙v1 + (v2∙x)v2∙v1 = (v1∙x) *1+0 = v1∙x=x∙v1)
这意味着 Mx = (v1∙x)Mv1 + (v2∙x)Mv2 , Mx = (v1∙x)σ1u1+ (v2∙x)σ2u2
由于dot product 操作可以用矩阵转置实现: v∙x = vTx ,从而导出 Mx = u1σ1v1Tx +u2σ2v2Tx ,M = u1σ1v1T +u2σ2v2T 上述表达式可以简写成 M = UΣVT
其中U 是由向量u1 和u2(作为列)组成的矩阵, Σ 是对角矩阵,对角线上的值是σ1 和σ2,V 是向量v1和v2(作为列)组成的矩阵。矩阵V的上标T 代表V的矩阵转置。
上面显示了如何将矩阵M分解为三矩阵的积: V描述在domain中的规范正交基(orthonomal basis),U描述co-domain中的规范正交基,Σ描述在V中的向量在U中拉伸量。
所以SVD的Idea是:如果我们在向量空间Rn 和Rm上选择正确的基(basis),每个mxn矩阵均可对角线化(diagonalized)。
现在我们可以看到一个m×n矩阵A的SVD。这里的变换将![]() 带到一个不同的空间
带到一个不同的空间![]() 。
。
奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
![]()
The SVD and EVD:
我们的构造展示了如何从对称矩阵![]() 的EVD确定A的SVD。相反,很容易从A的SVD恢复
的EVD确定A的SVD。相反,很容易从A的SVD恢复![]() 的EVD。假设奇异值分解A =
的EVD。假设奇异值分解A = ![]() 是给出。显然,
是给出。显然,![]() =
= ![]() 和
和![]() 。现在以任一顺序,Σ和ΣT的乘积是一个平方对角线矩阵,其前k个对角线值是
。现在以任一顺序,Σ和ΣT的乘积是一个平方对角线矩阵,其前k个对角线值是![]() ,并且任何剩余的对角线条目等于0。因此,
,并且任何剩余的对角线条目等于0。因此,![]() =
= ![]() 是
是![]() 的EVD和
的EVD和![]() 是
是![]() 的EVD。所以,在A的任何奇异值分解中,右奇异向量(V的列)必须是
的EVD。所以,在A的任何奇异值分解中,右奇异向量(V的列)必须是![]() 的特征向量,左奇异向量(U的列)必须是
的特征向量,左奇异向量(U的列)必须是![]() 的特征向量,并且奇异值必须是非零的平方根这两个对称矩阵共有的特征值。因此,在
的特征向量,并且奇异值必须是非零的平方根这两个对称矩阵共有的特征值。因此,在![]() 和
和![]() 的多维特征空间中可能的正交变换,SVD中的矩阵V和U是唯一确定的。
的多维特征空间中可能的正交变换,SVD中的矩阵V和U是唯一确定的。
SVD的应用:
PCA,数据压缩等等
参考文献: A Singularly Valuable Decomposition: The SVD of a Matrix