深度知识追踪入门
背景介绍
知识追踪(Knowledge Tracing)是根据学生过去的答题情况对学生的知识掌握情况进行建模,从而得到学生当前知识状态表示的一种技术,早期的知识追踪模型都是依赖于一阶马尔科夫模型,例如贝叶斯知识追踪(Bayesian Knowledge Tracing)。将深度学习的方法引入知识追踪最早出现于发表在NeurIPS 2015上的一篇论文《Deep Knowledge Tracing》,作者来自斯坦福大学。在这篇论文中,作者提出了使用深度知识追踪(Deep Knowledge Tracing)的概念,利用RNN对学生的学习情况进行建模,之后引出了一系列工作,2019年已经有使用Transformer代替RNN和LSTM并且达到了SOTA的论文。
由于深度学习并不需要人类教会模型不同题目的难易、考核内容等特定的知识,避免了大量的手工标注特征工作量,而且在互联网在线教育行业兴起后,拥有了海量的学生答题记录,这些答题记录就能教会模型将题库中成千上万条题目encode为一个向量,并且能类似于word2vec那样找出题目之间的关联。因此之后各种AI+教育、个性化、智能化教育的概念也火了起来。不过截止目前深度知识追踪仍然只是一个小领域,业界应该是做了不少工作的,但因为每个公司教育数据的私密性,不同公司数据的多样性,导致了数据集不公开,方法也大多不通用的情况,因此我们并不太能了解到那些在线教育巨头背后的AI技术,至于学界,论文大多发表在教育数据挖掘国际会议上(Educational Data Mining)。本文简单介绍深度知识追踪,给有兴趣入门的同学的作参考。
任务定义
知识追踪的任务是根据学生的答题记录,通常是一个时间序列,有些业务场景下是与时间无关的,建模得到学生的知识掌握状态,从而能准确预测其未来的答题情况,并依据此为未来的智能化出题做参考,避免给学生出太难或太简单的题目。具体上,假设一个学生的答题记录为 x 0 , x 1 , . . . , x t x_{0},x_{1},...,x_{t} x0,x1,...,xt,我们要去预测下一个交互的情况 x t + 1 x_{t+1} xt+1,通常一次交互 x t = ( q t , a t ) x_{t}=(q_{t}, a_{t}) xt=(qt,at), q t q_{t} qt代表该学生回答题目 a t a_{t} at的正误情况。简单的来说就是知道了学生答了一系列题目,也都知道他都回答对了没,现在我要从题库里再抽一题给他,让模型预测预测他能不能答对,答对的概率是多少,那么如果模型给出的概率是1,代表这题对他来说是太简单了,如果给出的概率为0,就代表这题可能太难了,他八成是做不出来的。
模型
上面说了,Deep Knowledge Tracing这篇论文是用了RNN来把答题记录当做平常的时间序列来建模,至于RNN,下面简单列个公式表示一下,相信入门过NLP的同学都是认识RNN的。
h t = tanh ( W h x x t + W h h h t − 1 + b h ) y t = σ ( W y h h t + b y ) \begin{aligned} \mathbf{h}_{t} &=\tanh \left(\mathbf{W}_{h x} \mathbf{x}_{t}+\mathbf{W}_{h h} \mathbf{h}_{t-1}+\mathbf{b}_{h}\right) \\ \mathbf{y}_{t} &=\sigma\left(\mathbf{W}_{y h} \mathbf{h}_{t}+\mathbf{b}_{y}\right) \end{aligned} htyt=tanh(Whxxt+Whhht−1+bh)=σ(Wyhht+by)
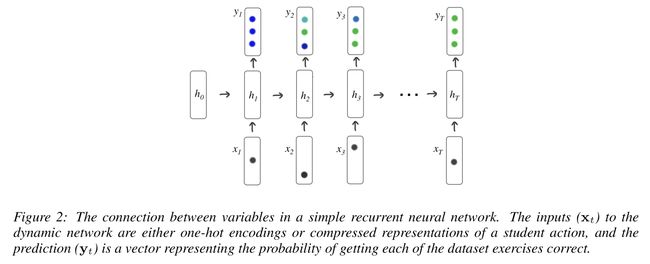
模型的输入和输出
假设数据集有 M M M道题目,我们让 x t x_{t} xt为one-hot encoding,由于 a t ∈ R M a_{t} \in R^{M} at∈RM, q t ∈ { 0 , 1 } q_{t} \in \{0,1\} qt∈{0,1},那么 x t ∈ R 2 M x_{t} \in R^{2M} xt∈R2M,即针对题目 a t a_{t} at有答对和答错两种不同的状态,所以one-hot的长度是2M。这时候很自然就能想到使用NLP中常用的Embedding,将每个one-hot向量通过embedding转为一个维度小得多的向量 n a t , q t ∈ R N n_{a_{t}, q_{t}} \in R^N nat,qt∈RN, N < < M N << M N<<M,这样每道题目就可以初始化为一个随机的低维向量表征,在之后的数据集上进行训练。
每个时间步,模型输入 x t x_{t} xt,输出 y t ∈ R M y_{t} \in R^{M} yt∈RM,维度与题库大小相同,代表着学生答对每道题目的概率。我们根据 y t y_{t} yt可以选出下一题 a t + 1 a_{t+1} at+1的正确概率 p t + 1 p_{t+1} pt+1,再和真实的标签 q t + 1 q_{t+1} qt+1求交叉熵损失函数即:
L = ∑ t ℓ ( y T δ ( q t + 1 ) , a t + 1 ) L=\sum_{t} \ell\left(\mathbf{y}^{T} \delta\left(q_{t+1}\right), a_{t+1}\right) L=t∑ℓ(yTδ(qt+1),at+1)
其中 ℓ \ell ℓ代表交叉熵损失函数, δ \delta δ代表one-hot编码。
Optimization
为了防止过拟合,在使用中间的隐层状态 h t h_{t} ht通过dense层得到 y t y_{t} yt时加了dropout,同时在反向传播时为了避免梯度爆炸,增加了梯度裁剪,评价指标使用的是AUC(area under the curve)。
实验结果
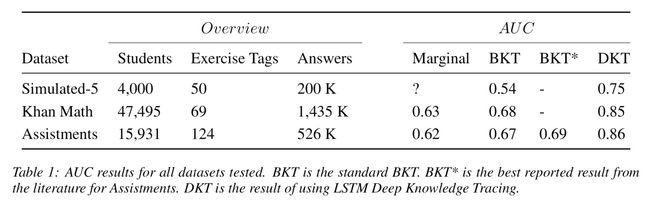
作者在三个数据集上进行了实验,在当时都达到了SOTA
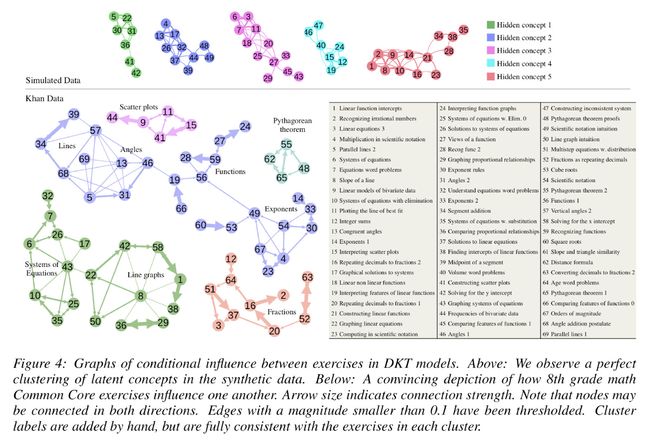
并且在Khan Data和Simulated Data上做了可视化,发现RNN成功捕捉到了相似题目之间的关联,将同一概念下的题目如函数、几何聚到了一起。
优缺点
优点
- 能根据学生最近的答题情况记录较长时间的知识情况。
- 能根据每次答题更新知识状态,只需要保存上一个隐层状态,不需要重复计算,适合线上部署。
- 不需要domain specific的知识,对任何用户答题数据集都适用。
- 能够自动捕捉相似题目之间的关联。
缺点
- 当答题序列被打乱时,模型输出的结果波动大,即相同的题目和相同的回答,当答题顺序不一致时,得到的知识状态不同。
- 由于上述问题,且学生在答题过程中对知识的掌握程度不一定具有连续一致性,导致对学生知识状态的预测受顺序影响发生偏差。
- 黑盒,有时会出现第一题答对导致对之后的预测概率都偏高,而第一题答错对之后的预测概率都偏低的奇怪情况。
总结
介绍的这篇论文是深度知识追踪的开山之作,之后有许多论文对它进行的完善,几个具有代表性的是:
- How Deep is Knowledge Tracing?
- Going Deeper with Deep Knowledge Tracing
- Incorporating Rich Features into Deep Knowledge Tracing
- Addressing Two Problems in Deep Knowledge Tracing via Prediction-Consistent Regularization
- A Self-Attentive model for Knowledge Tracing
参考文献:
[1] Piech, C. et al. Deep knowledge tracing. in Advances in Neural Information Processing Systems 505–513 (2015).