表示3D的向量和点。
这个结构用于在Unity传递3D位置和方向。它也包含做些普通向量运算的函数。
除了下面列出的函数,其他类用于处理向量和点。例如Quaternion和Matrix4x4类用于旋转或变换向量和点。


1、Vector3.this[int] 操作索引
使用[0], [1], [2]分别访问组件x, y, z组件。简单来说就是用索引号代替x, y, z组件。
using UnityEngine;
using System.Collections;
public class ExampleClass : MonoBehaviour {
public Vector3 p;
void Example() {
p[1] = 5;
}
}
API详解
A、Vector3类实例属性
1、normalized:单位化向量
public Vector3 normalized{ get; }
此属性用来获取Vector3实例的单位向量,即返回向量的方向与原方向相同,而模长变为1。
此属性和实例方法Normalized( )的区别:
设A、C均为Vector3实例,则:
执行代码C=A.normalized后只是将向量A的单位向量赋给向量C,而向量A自身未变
执行代码A=Normalize()便会将向量A进行单位化处理,使得原向量A变成了单位向量
执行代码C=Vector3.Normalize(A)的结果与执行代码C=A.normalized的相同,即只是将A的单位向量赋给了向量C,而向量A未被改变,因此编程中常用代码C=A.normalized代替。
2、sqrMagnitude:模长平方
public float sqrMagnitude{ get; }
此属性用于返回Vector3实例模长的平方值,由于计算开方值比较消耗资源,在非必要情况下,可以考虑用
sqrMagnitude代替属性magnitude,例如比较两个向量长度的大小
B、Vector3类实例方法
1、Scale:向量放缩
public void Scale(Vector3 scale);
此方法可以对Vector3实例按参照向量scale进行放缩,注意与静态方法Scale(a:Vector3,b:Vector3)的区别:
实例方法直接更改实例的值,静态方法将值赋给新的实例
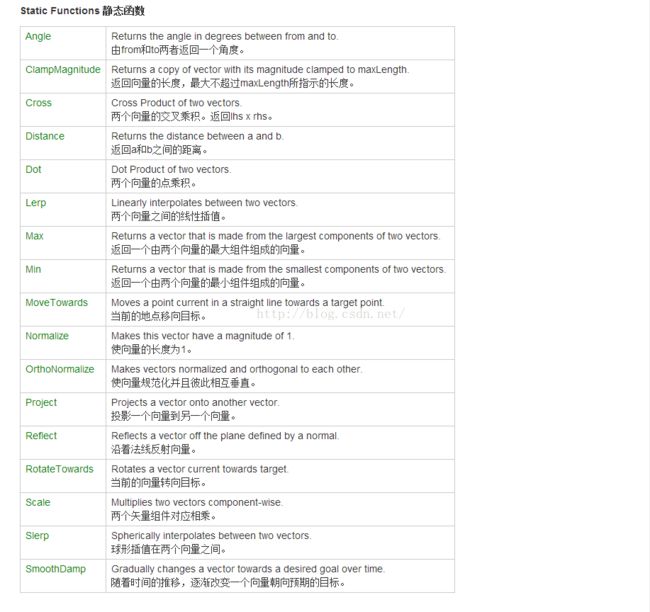
C、Vector3类静态方法
1、Angle:求两个向量夹角
public static float Angle(Vector3 from, Vector3 to );
返回向量from和to的夹角,单位为角度,返回值的范围为[0,180],且当from和to至少一个为Vector.zero时,返回值为90
2、ClampMagnitude:向量长度
public static Vector3 ClampMagnitude(Vector3 vector,float maxLength);
此方法用于返回向量vector3的一个同方向向量,其模长受maxLength的限制
返回向量的方向和vector方向相同
当maxLength大于vector的模长时,返回向量与vector相同
当maxLength小于vector的模长时,返回向量的模长等于maxLength,但方向与vector相同
3、Cross方法:向量叉乘
public static Vector3 Cross(Vector3 lhs,Vector3 rhs);
此方法用于求两个向量的叉乘,满足:
c⊥a,c⊥b;
|c|=|a|*|b|sin(e);
a,b,c满足右手法则,即四指指向b的方向,然后向a的方向旋转,大拇指指向的方向是c的方向
4、Dot:向量点乘
public static float Dot(Vector3 lhs, Vector3 rhs);
此方法用于返回参数lhs和rhs的点乘
c=Vector3.Dot( a,b );
c=|a|*|b|cos(e)
在实际开发中,通常利用点乘来确定两个物体的相对位置关系,例如敌人相对主角的位置关系
5、Lerp:向量插值
public static Vector3 Lerp(Vector3 from, Vector3 to, float t);
此方法用于返回一个参数from到to的线性插值向量
C=Vector3.Lerp(A,B,t)
当t<=0时,向量C=A;
当t>=1时,向量C=B;
当0
6、MoveTowards:向量插值
public static Vector3 MoveTowards(Vector3 current, Vector3 target, float maxDistanceDelta);
此方法用于返回一个从参数current到参数target的插值向量。
C=Vector3.MoveTowards(A,B,sp);
向量C为:C=A+K*(B-A)
其中K=sp>(dx^2+dy^2+dz^2)^(1/2)?1:sp/(dx^2+dy^2+dz^2)^(1/2)
7、OrthoNormalize:两个坐标轴的正交化
public static void OrthoNormalize(ref Vector3 normal, ref Vector3 tangent);
此方法用于对向量normal进行单位化处理,并对向量tangent进行正交化处理
Vector3.OrthoNormalize(ref v1, ref v2);
v1、v2变换为v3、v4
v3=v1.normalized
v4与v3垂直,且v4模长为1
8、OrthoNormalize:3个坐标轴的正交化
public static void OrthoNormalize(ref Vector3 normal, ref Vector3 tangent,ref Vecotor3 binormal );
此方法用于对向量normal进行单位化处理,并对向量tangent和binormal进行正交化处理
向量binormal垂直于向量normal和tangent组成的平面,且向量binormal变换前后的夹角小于90度,即执行OrthoNormalize之后,bi'normal的方向可能垂直于由normal和tangent组成的平面的正面也可能是负面,到底垂直于哪个面由初始binormal的方向决定
9、Project:投影向量
public static Vector3 Project(Vector3 vector,Vector3 onNormal);
此方法用于返回向量vector在向量onNormal上的投影向量
projects=Vector3.Project(from_T.position,to_T.position);
projects为from_T在to_T方向上的投影向量,另外,向量to_T无需为单位向量
10、Reflect:反射向量
public static Vector3 Reflect(Vector3 inDirection,Vector3 inNormal);
其中,参数inDirection为入射向量,参数inNormal为镜面向量
此方法用于返回向量inDi'rection的反射向量
参数inNormal向量必须为单位向量,否则入射角和反射角不相等
当inNormal取反时,反射向量不受影响
入射向量、反射向量和镜面向量共面
11、RotateTowards:球形插值
public static Vector3 RotateTowards(Vector3 ccurrent, Vector3 target, float maxRadiansDelta,
float maxMagnitudeDelta);
其中参数current到target的球形旋转插值向量,此方法可控制插值向量的角度和模长
12、Scale:向量放缩
public static Vector3 Scale(Vector3 a, Vector3 b);
此方法用于返回向量a和b的乘积,注意和实例方法a.Scale(b)的区别
13、Slerp:球形插值
public static Vector3 Slerp(Vector3 from,Vector3 to,float t);
此方法用于返回参数from点到参数to点的球形插值向量,参数t范围为[0,1]
C=Vector3.Slerp(from,to,t);
K=e*(1-t)
|C|=(ax^2+ay^2+az^2)^(1/2)+[(bx^2+by^2+bz^2)^(1/2)-(ax^2+ay^2-az^2)^(1/2)]*t
14、SmoothDamp:阻尼移动
public static Vector3 SmoothDamp(Vector3 current,Vector3 target,ref Vector3 currentVelocity,
float smoothTime);
public static Vector3 SmoothDamp(Vector3 current,Vector3 target,ref Vector3 currentVelocity,
float smoothTime,float maxSpeed);
public static Vector3 SmoothDamp(Vector3 current,Vector3 target,ref Vector3 currentVelocity,
float smoothTime,float maxSpeed,float deltaTime);
current为起始坐标,target为终点坐标,currentVelocity为当前帧移动向量,参数smoothTime为接近目标的阻尼强度,
参数maxSpeed为最大移动速度,默认值为无穷大,参数deltaTime为控制当前帧实际移动距离,即为maxSpeed*deltaTime,
默认值为Time.deltaTime
此方法用于模拟GameObject对象从current点到target点之间的阻尼运动
D、Vector3类运算符
1、operator==
用于判断向量是否足够接近或相等
经验总结:
控制游戏对象向目标点移动有三种方法:
(1)、用Lerp方法(插值函数):
this.gameObject.transform.position=Vector3.Lerp(this.gameObject.transform.position,target.transform.position,speed);
(2)、用MoveTowards方法
this.gameObject.transform.position=Vector3.MoveTowards(this.gameObject.transform.position, target.transform.position,speed);
(3)、用Distance和Translate方法
if(Vector3.Distance(this.gameObject.transform.position,target.transform.position)>0.1)
{
this.gameObject.transform.Translate(target.transform.up);
}
三者之间的不同点:
用Lerp方法控制游戏对象向目标点移动,其是按比例进行移动的,只能无限接近,不能到达目标位置点。
用MoveTowards方法控制游戏对象向目标点移动,每次移动一个设定的步长,其可以到达目标位置点。
用Distance和Translate方法控制游戏对象向目标点移动,有很大的局限性,其必须先要知道要移动的方向才可以,况且只能是正方向,并且其也只能接近,不能到达目标点位置。