常见十大(内部)排序算法 - Sorting Algorithms C++
基本概念
内部和外部排序
内部排序在这里指的是只用到了电脑内存而不使用外存的排序方式。相对的,外部排序就是同时动用了电脑内存和外存的排序方式。本文在这里只讨论内部排序。
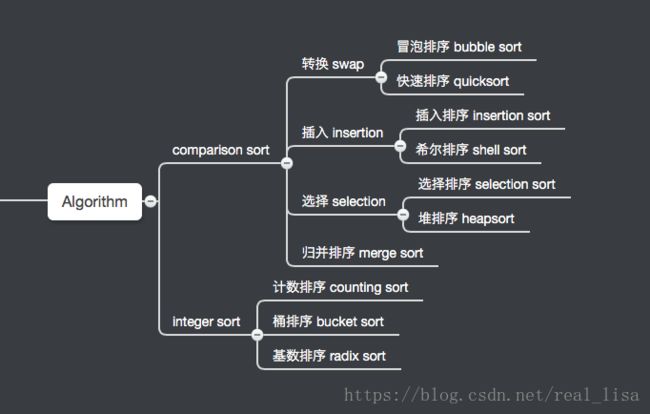
分类
比较和非比较排序
比较在这里指的是需要比较两个元素的大小(前后)才能进行的排序。难道有排序算法不需要比较吗?的确有,但是不多。常见的有三种:计数排序,桶排序,基数排序。它们用统计的方法规避了比较,详细的可查看之后讲到的这些算法。
转换
每次只调换两个元素之间的位置。
插入
遍历到的元素放入之前维护的已完成排序的序列中。
选择
选择剩余元素中最大或最小的元素。
知道了以上概念后,就能更好的看懂分类了(建议先略看,看完所有排序算法后再回看)
稳定度 (Stability)
定义:如果排序算法并不改变两个相同值的元素的相对位置,则此算法稳定度高。
这张图十分形象地解释了以上定义:

这个概念为什么重要?如果是稳定算法的话,我们可以先排序名,在排序姓。
(from:https://stackoverflow.com/questions/1517793/what-is-stability-in-sorting-algorithms-and-why-is-it-important)
冒泡排序 (Bubble Sort)
1 算法
从第一个元素开始遍历,比较当前元素跟下一个元素的大小,如果不符合排序,交换位置。结束最后一个元素后,再从头开始不断遍历,直到完成排序。

剖析:每遍历完一次,最小数前进一位,但是最大数到达最终位;末尾已经是最终排序。
2 代码
基本
void bubble(vector& arr){
for(int i=0;iarr[j+1]) swap(arr[j],arr[j+1]);
//arr[j]>arr[j+1] stable
//arr[j]>=arr[j+1] unstable
}
}
} 优化1: 每遍历完一遍,看是否已经提前完成排序(用 hasSorted)。如是,提早结束。
void bubble1(vector& arr){
bool hasSorted = false;
for(int i=0;iarr[j+1]){
hasSorted = false;
swap(arr[j],arr[j+1]);
}
}
}
} 优化2: 根据“剖析:每遍历完一次,最小数前进一位,但是最大数到达最终位;末尾已经是最终排序。”,每遍历完一次,里面的loop就可以少遍历一个元素。但其实由此我们可以推论,最后一个swap的j和j+1, j之后的元素(不包括j)都已经完成排序了。
void bubble2(vector& arr){
int n = arr.size()-1;
for(int i=0;iarr[j+1]){
upto = j; //upto=j不定大小的最后一位, j+1 已经完成排序(最后一个if)
swap(arr[j],arr[j+1]);
}
}
n=upto;
if(n==0) break;
}
} 优化3: 可以进行双向的循环,正向循环把最大元素移动到末尾,逆向循环把最小元素移动到最前,这种优化过的冒泡排序,被称为鸡尾酒排序(Cocktail Sort)
void bubble4(vector& arr){
int beg = 0;
int end = arr.size()-1;
while(begarr[i+1]){
nend=i;
swap(arr[i],arr[i+1]);
}
}
if(nend==end) break;
end = nend;
//逆向循环
for(int i=end; i>beg;i--){
if(arr[i] 
3 分析
3.1 稳定度
决定于比较的时候用的是大于等于(小于等于)还是大于(小于)
arr[i]>arr[i+1] --> 稳定
arr[i]>=arr[i+1] --> 不稳定
3.2 时间
逆向排序时是最差的情况,O(n^2)
3.3 空间
需要O(1)来完成swap等
快速排序 (Quicksort)
1 算法
利用了 divide & conquer 的思想。
在序列中任意选择一个数,然后把序列分成比这个数大的和比这个数小的两个子序列。不断重复以上步骤完成排序。

2 代码
int partition1(vector& arr, int beg, int end){
int pivot = arr[beg];
int l=beg+1, r=end;
while(l<=r){
if(arr[l]pivot) r--;
else if(arr[l]>=pivot && arr[r]<=pivot){
swap(arr[l++], arr[r--]);
}
}
swap(arr[r], arr[beg]);
return r;
}
int partition2(vector& arr, int beg, int end){
int pivot = arr[beg];
int index = beg+1;
for(int i=index;i<=end;i++){
if(arr[i]& arr, int beg, int end){
if(beg 优化1 切换到插入排序
因为快速排序在小数组中也会递归调用自己,对于小数组,插入排序比快速排序的性能更好,因此在小数组中可以切换到插入排序。
优化2 三数取中
最好的情况下是每次都能取数组的中位数作为切分元素,但是计算中位数的代价很高。人们发现取 3 个元素并将大小居中的元素作为切分元素的效果最好。
优化3 三向切分
对于有大量重复元素的数组,可以将数组切分为三部分,分别对应小于、等于和大于切分元素。
等之后review的时候再贴code吧~ 写这个太烧脑了~
3 分析
3.1 稳定度
3.2 时间
最好的情况是pivot都是中点 -- O(n log n) (平均情况也是如此,所以有些快排算法会在一开始随意打乱数列)
最差的情况是本来就是有序数列 -- O(n^2)
3.3 空间
尽管没有用另外的数据结构,但是不是O(1)哦~ 因为recursion需要在stack frames里面重新建array。我上面的code需要O(n) extra space, 最优的话,可以达到O(log n)
4 变形
LeetCode - Top K Frequent Elements
插入排序 (Insertion Sort)
1 算法
维护一段有序数列,同时遍历待排序的数列,在有序数列里找到合适的位置,插入元素。

2 代码
void insertion(vector& arr){
for(int i=1;i=0;j--){
if(arr[temp] 优化1 找到当前元素该插入的位置后,再插入
void insertion1(vector& arr){
for(int i=1;i=0 && temp 3 分析
3.1 稳定度
arr[temp] 最优情况是正向排序 -- O(n) 最差是逆向排序,每次插入都需要比较已完成数列元素的个数 -- O(n^2) O(1) - 如上code -> temp 简单插序的改进版,选择先插入距离远的元素。 选择一个间距,将序列分成很多子序列并进行插入排序。降低间距并重复插入排序,直到间距降为1完成排序。 对于相同的两个数,可能由于分在不同的组中而导致它们的顺序发生变化。 希尔排序的时间复杂度与增量(即,步长gap)的选取有关。例如,当增量为1时,希尔排序退化成了直接插入排序,此时的时间复杂度为O(N²),而Hibbard增量的希尔排序的时间复杂度为O(N3/2)。 O(1) - 如上code -> temp 当gap最大时,相当于bubble sort; 当gap=1时,就相当于insertion sort。 维护一段有序数列,同时遍历待排序的数列,通常找最小的元素插入到有序数列中。重复直到待排序数列没有剩余元素。 arr[j] 无论好坏都需要O(n^2), 因为每次选出最小值都需要遍历所有剩余元素。 O(1) 了解推(Heap) 利用了 divde & conquer 的思维方式,有时候也称为合并排序。 将序列不断分解为子序列直到只剩于0或1位。再将子序列不断按大小合并,最终恢复为原来序列的长度。 a[ba]<=b[bb] -- 当元素相等时并不改变元素的前后位置, 所以归并排序是稳定的。 每次都将子序列分为母序列的一半,所以O(n log n) 需要另外的空间来存子序列 -- O(n) 顾名思义统计待排序数列中每个数字出现的次数。填入数据结构的过程其实就是排序的过程。最后再按照统计结果覆盖原序列就行了。 不是基于比较的排序,但是前提条件是知道排序元素的范围。 stable - https://stackoverflow.com/questions/2572195/how-is-counting-sort-a-stable-sort O(n+k), k为range O(n+k), 用来存计数结果 基于计数排序,增加了函数映射(hashmap),把元素归于不同的桶中便于排序。 比如说,需要排序1-100的数字。如果是计数排序,就需要一个100的vector来存;桶排序可以用一个10的vector来存,每个元素进入(元素/10)index的vector。 因为不同数据对函数映射的要求不同,这里就不贴代码了。 最好 - O(n+k) 最差 - O(n^2) O(n*k) 基数排序是按照低位先排序,然后收集;再按照高位排序,然后再收集;依次类推,直到最高位。有时候有些属性是有优先级顺序的,先按低优先级排序,再按高优先级排序。最后的次序就是高优先级高的在前,高优先级相同的低优先级高的在前。 贴个别人家的 基数排序基于分别排序,分别收集,所以是稳定的。但基数排序的性能比桶排序要略差,每一次关键字的桶分配都需要O(n)的时间复杂度,而且分配之后得到新的关键字序列又需要O(n)的时间复杂度。假如待排数据可以分为d个关键字,则基数排序的时间复杂度将是O(d*2n) ,当然d要远远小于n,因此基本上还是线性级别的。 基数排序的空间复杂度为O(n+k),其中k为桶的数量。一般来说n>>k,因此额外空间需要大概n个左右。 https://www.cnblogs.com/onepixel/articles/7674659.html https://blog.csdn.net/hguisu/article/details/7776068 https://github.com/francistao/LearningNotes/blob/master/Part3/Algorithm/Sort/面试中的%2010%20大排序算法总结.md3.2 时间
3.3 空间
希尔排序 (Shell Sort)
1 算法

2 代码
//只需要把之前insert function的gap=1改成变量gap就行
void shellInsert(vector3 分析
3.1 稳定度
3.2 时间
3.3 空间
3.4 对比其他算法
选择排序 (Selection Sort)
1 算法

2 代码
void select(vector3 分析
3.1 稳定度
3.2 时间
3.3 空间
堆排序 (Heapsort)
1 算法
2 代码
3 分析
3.1 稳定度
3.2 时间
3.3 空间
归并排序 (Mergesort)
1 算法
2 代码
vector3 分析
3.1 稳定度
3.2 时间
3.3 空间
计数排序 (Counting Sort)
1 算法

2 代码
void count(vector3 分析
3.1 稳定度
3.2 时间
3.3 空间
桶排序 (Bucket Sort)
1 算法

2 代码
3 分析
3.1 稳定度
3.2 时间
3.3 空间
基数排序 (Radix Sort)
1 算法
2 代码
// LSD Radix Sort
var counter = [];
function radixSort(arr, maxDigit) {
var mod = 10;
var dev = 1;
for (var i = 0; i < maxDigit; i++, dev *= 10, mod *= 10) {
for(var j = 0; j < arr.length; j++) {
var bucket = parseInt((arr[j] % mod) / dev);
if(counter[bucket]==null) {
counter[bucket] = [];
}
counter[bucket].push(arr[j]);
}
var pos = 0;
for(var j = 0; j < counter.length; j++) {
var value = null;
if(counter[j]!=null) {
while ((value = counter[j].shift()) != null) {
arr[pos++] = value;
}
}
}
}
return arr;
}3 分析
3.1 稳定度
3.2 时间
3.3 空间
Reference: