单目slam LoopClosing之Sim3优化
sim3群运算
最小表示: [ω,ν,σ] , 其中 ω∈R3,ν∈R3,σ∈R ,分别表示旋转、位移、尺度增量。
逆运算:
指数运算:
A=eσsin(θ) , B=eσcos(θ) , θ=∥ω∥2
则 s=eσ , R=exp([ω]×) , t=Wν
对数运算
乘法运算:
闭环纠正
由于我们slam系统一般都是增量式运动估计,所以随着系统的运行,误差不断的累计,譬如旋转误差和位移误差,而回环检测可以用来消除这种累计误差。
对于视觉slam我们常用基于视觉词典方法来检测回环,如DBow、FABMap等方法,本文着重介绍回环检测后的误差纠正,因此对于回环检测的方法不再细述。
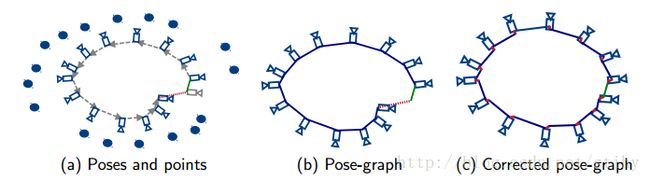
为了纠正累计误差,我们一般使误差大致均匀分布在整个相机Pose链上,从而当前帧和回环匹配帧误差不至于过大。如果我们优化所有的相机Pose和Point,一方面计算量过于庞大,另一方面由于要优化模型存在非凸性,因此可能做Full BA并不能达到我们我们期待收敛的结果。所以一般如图b只对相机的Pose作PoseGraph优化,然后再做个Pose和Point的Global Bundle Adjustment。
1. 6自由度的PoseGraph优化
假设对于相机两个Pose Tiw 和 Tjw ,两个Pose的相对变换 Tji=TjT−1i 。既然我们要优化两个相机的Pose Tiw 和 Tjw ,那么我们总要有测量量吧?而又不能优化特征所对应的MapPoint,所以就把初始两个相机的位姿相对变换作为测量值,这样优化前后整个相机Pose链帧间相对变换基本保持不变。
我们在 tangent space定义两个Pose误差为:
其中 log(.)∨:=(log(.))∨ ,先对SE3进行对数运算转换成se3,再vee-operator转装成 R6 矢量。则对整个PoseGraph作优化目标energy function:
其中 Ωij为信息矩阵 ,第一帧相机Pose固定,优化 T2,T3⋯Tm 。
2. 7自由度的PoseGraph优化
由于单目是纯相机投影模型。如下图所示,两个地图点距离相机5m、6m,相机运动2m,和两个地图点距离相机10m、12m,相机运动4m,所观察到的图像平面投影点坐标变换情况一样的。所以单目slam所构建地图与所估计的运动均up to sclae。
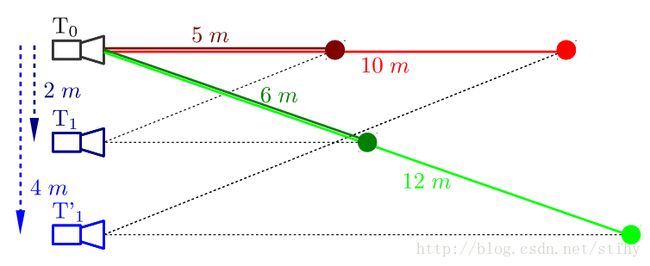
相机运动带来不只包括旋转误差、位移误差,还伴随带来尺度飘逸,比较明显现象如上图随着相机的运动,相机的轨迹越来越小,尺度也在不断的改变。如果我们像上述方法在SE3上作6自由度优化,虽然可以纠正旋转和位移飘逸,却不能处理scale drift。
定义在sim3上误差:
和上述6自由度优化类似,我们定义优化初始估计值和测量值:
其中对于回环帧 sloop≠1 ,我们不能像其他帧一样假设s=1,否则所有帧尺度都为1,没有尺度误差怎么优化尺度呢。一般对于检测到回环匹配两帧,我们都会采用附录【1】方法计算两帧间Sim3。
假设优化后Pose的Sim3为 Scorjw=(Rjw,tjw,s) ,则纠正之后Pose:
Point的3D坐标 Pkw 纠正为:
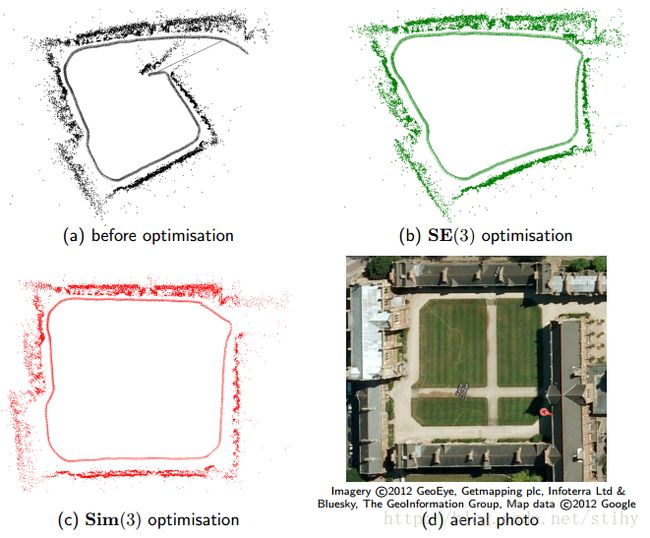
对比6自由度优化和7自由度优化,会发现在7自由Sim3上优化后结果更加接近于真实值。
附录:
[1]Closed-form solutionof absolute orientation using unit quaternions.
[2]Scale Drift-Aware Large Scale Monocular SLAM.