【源码】实时交通融合的SimEvents模型:一个分散、计算高效、实时的交通融合管理框架仿真...
该仿真设计框架旨在优化交通路口和自主车辆(CAV)融合的过程,同时保证状态、控制和安全约束条件。
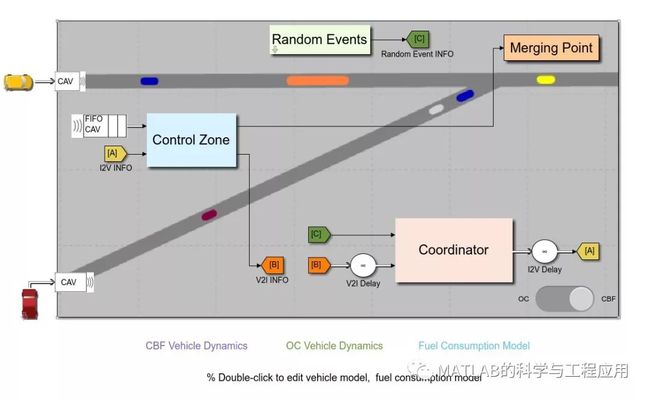
This framework aims to optimize the process of Connected and Automated Vehicles (CAVs) merging at a traffic intersection while guaranteeing the state, control and safety constraints.
我们将融合点周围控制区内所有CAV的自动融合任务分解为相同车道安全约束和不同车道安全融合,并使用控制屏障功能(CBF)实现这些要求。
We decompose the task of automatic merging for all the CAVs in a control zone around a merging point into same-lane safety constraints and different-lane safe merging, and implement these requirements using control barrier functions (CBFs).
我们考虑两个主要目标。
We consider two main objectives.
首先,为了最大限度地缩短行驶时间,我们利用指数稳定控制李雅普诺夫函数(CLF)使CAV达到道路行驶的最大速度。
First, to minimize travel time, we make the CAVs reach the road maximum speed with exponentially stabilizing control Lyapunov functions (CLF).
其次,在优化问题中,我们将能耗作为代价进行惩罚。
Second, we penalize energy consumption as a cost in an optimization problem.
然后我们将融合问题分解成分散的子问题,这些子问题被表示为一个二次规划序列(QP),并进行实时求解。
We then decompose the merging problem into decentralized subproblems formulated as a sequence of quadratic programs (QP), which are solved in real time.
框架主要特点如下:
Main features:
1. 保证所有约束条件(安全、控制和速度)。
1. All constraints (safety, control and speed) guaranteed.
2. 分散,计算效率高,实时性强(能够处理噪声)。
2. Decentralized, computational efficient and real-time (capable to handle noise).
3. 能够求解非线性车辆动力学和复杂目标函数。
3. Able to solve non-linear vehicle dynamics and complex objective functions.
参考文献:
Wei Xiao, Calin Belta, and Christos G. Cassandras. Decentralized merging control in traffic networks: A control barrier function approach. In Proc. ACM/IEEE International Conference on Cyber-Physical Systems, pages 270–279, Montreal, Canada, 2019. https://doi.org/10.1145/3302509.3311054
注意:
Note:
在这个版本中,主车道和融合车道使用不同的CAV生成器,因此两个CAV可能同时来自这两个不同的车道。
* In this version, the main and merging lanes use different CAVs generator, so two CAVs may come from these two different lanes at the same time (discretized time instant).
如果两个CAV同时来自两个不同的车道,则由于FIFO队列的原因,会出现一些问题。当这种情况发生时,在下一个到达CAV上施加扰动(其位置变为-0.1,i和i-1之间的距离变为0.1而不是0)。
* If two CAVs come from two different lanes at the same time, there will be some problems because of the FIFO queue. When this happens, perturbation is enforced on the next arrival CAV (its position changes to -0.1 and the distance between i and i-1 changes to 0.1 instead of 0).
此版本仅适用于CBF控制器,最佳控制器(OC)尚不可用。
* This version only works for CBF controller, Optimal Controller (OC) is not available yet.
完整源码下载请点击“阅读原文”