ubuntu18 安装ROS
安装版本
| ubuntu16 | ubuntu18 |
|---|---|
| kinetic kame | Melodic |
安装步骤
添加跟新源
跟新来自packages.ros.org的软件
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或者国内的源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
选第二个
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
![]()
坑一
跟新的时候碰到:签名不能被验证
解决:上面提示: NO_PUBKEY F42ED6FBAB17C654
修改签名:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
再次更新完成
安装
- 桌面完整安装:ROS,rqt,rviz,机器人通用库,2D / 3D模拟器,导航和2D / 3D感知
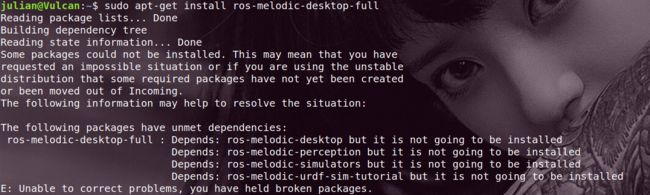
sudo apt-get install ros-melodic-desktop-full
- 桌面安装:ROS,rqt,rviz和机器人通用库
sudo apt-get install ros-melodic-desktop
- ROS基础:ROS包,构建和通信库,没有GUI工具
sudo apt-get install ros-melodic-ros-base
- 特定包:
sudo apt-get install ros-melodic-PACKAGE
e.g.
sudo apt install ros-melodic-slam-gmapping
坑二
安装桌面完全版本的时候:缺少依赖
 解决:
解决:
sudo apt-get install aptitude
sudo aptitude install ros-kinetic-desktop-full
安装的时候可能会让你选择移除一些包什么的,尽量保留
初始化 rosdep
在使用ROS之前,应该初始化rosdep,它可以让你在编译源码的时候更方便的安装系统的依赖项,而且它也是需要的对于ROS中的核心部件。
sudo rosdep init
rosdep update
有时候会碰到

解决方案参考
或者添加链接描述
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装rosinstsll
rosinstall是一种常用的命令行工具可安装上
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
小海龟测试
一个终端
roscore
第二个终端
rosrun turtlesim turtlesim_node
再开起一个终端控制
rosrun turtlesim turtle_teleop_key
在第三个终端里键盘控制上下左右小海龟就能运动了。
