ADAS/AD控制器模块开发03 - 系统架构设计及通用需求定义
上文中对功能和产品进行了区分。从本文开始,正式开始介绍组成产品的Building Blocks。
本文着重介绍System Architecture Design and General Requirement.
介绍系统架构之前,先简单介绍下ADAS/AD ECU常见的硬件架构。不展开描述,后续有专门章节深入探讨。目前主流的ADAS/AD ECU的硬件架构,一般有多个芯片(Core)构成;芯片种类也很多,有MCU(单片机),也有多核处理器(multi-core processor), 且多核处理器常以SoC形式存在(System On Chips,片上系统)。
ADAS-ECU:常见的ADAS-ECU包括智能前视摄像头模块、前向毫米波雷达模块、侧前毫米波雷达模块、侧后毫米波雷达模块、自动泊车控制模块、360环视控制器模块等。以智能前视摄像头模块为例,该模块一般至少包含两个芯片,一种是充当Host(主芯片)的MCU,对应关系是,在系统和软件范畴,常用Host相称,对应硬件范畴的MCU芯片。一种是实现视觉感知的视觉处理芯片,常以ARM+DSP的双核处理器形式存在(常用SoC称呼),本案例中的视觉处理芯片采用Mobileye公司的EyeQ3芯片。
AD-ECU:即自动驾驶域控制器(AD Domain Controller, ADC),目前ADC属于新生事物,因此技术路线百花齐放。有使用SoC(例如英飞凌的AURIX TC397)做Host,用MCU做Vehicle-Control的;有使用SoC做Host,用MCU做高精地图下载、存储、抽取的;有用MCU作为Host,并使用多个SoC分别做图像处理、数据融合的等等。
- Product Overview - 产品概览
以智能前视摄像头模块(IFC,Intelligent Frontal Camera)为例分析系统架构设计,如下图所示:
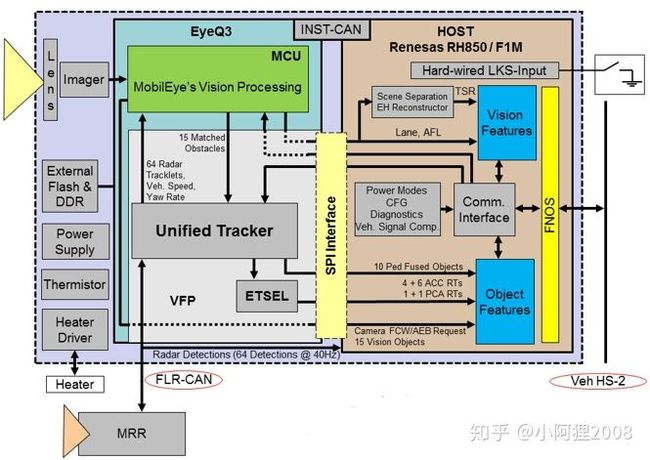
图1 基于Camera视角的1R1V方案系统架构
目前的L1-L2级别智能驾驶,产品配置方案上常采用1R1V方案(注意强调的是产品配置方案,并不是指硬件方案;硬件方案指单个产品的电子电路硬件的架构设计方案),即1xRadar+1xCamera的目标融合方案。具体的,前视摄像头提供视觉信息,包括车道线、路面上的目标(车辆、行人、骑自行车的人等)、道路旁边和道路上空的各种交通信号标志等信息;前向毫米波雷达提供路面上的目标信息;非目标信息之外的视觉信息,如车道线、交通信号标志等,直接发送给上层应用程序使用;来自两种传感器的目标信息,会经过融合算法计算后,再经过跟踪、目标筛选和轨迹预测后,最后生成结构化数据发送给上层应用程序。这里的目标融合方案,一般由Radar提供目标的Range(相对距离)、RangeRate(相对速率)和RangeAccel(相对加速度)信息,摄像头提供目标的Angle(角度)及目标分类(Classification),最后将可融合的目标融合在一起。该融合方案,也可称为Mobileye融合方案(Mobileye公司是ADAS领域、视觉感知方向的、到目前为止的绝对霸主,具体大家自己百度吧...),主要借助EyeQ3视觉算法芯片的VFP(Vision Fusion Processor, 视觉融合处理器)模块,利用私有CAN(Private-CAN,以下简称PCAN)将毫米波雷达模块的原始目标数据传入VFP中,利用目标融合算法和目标筛选算法,获得最终的feature可用的目标信息。在这条技术路线中,如果按照主从关系来描述的话,IFC智能前视摄像头为主模块,前毫米波雷达为从模块。因为所有Features都是放在IFC中的,与整车CAN(Vehicle-CAN,以下简称VCAN)交互的也只有IFC,雷达模块的地位已经削弱到纯粹的传感器的层面,且只能通过PCAN与IFC连接,自身并无法与整车直接取得交互(也无必要)。关键词总结:强者更强、弱者更弱的强耦合型1R1V关系。
值得一提的是,1R1V融合方案中,除了上述技术路线,还存在另一种技术路线。这条技术路线,主要由德国的两个Tier1巨头采用,博世和大陆。这两个公司共同的特点就是,当年ADAS刚开始兴起时,对雷达的需求特别大,而且加上雷达的硬件技术门槛很高,这两个公司利用其技术实力,迅速占领市场,一直霸占雷达模块市场的前两名,直到目前为止仍旧是这样。讲这个背景故事,主要是为了展现雷达产品在这两个公司中的绝对强势地位、雷达团队的强势话语权、资源掌握的优先权。而这两位大哥又不愿意在技术上受制于人,因此在IFC产品上,都采用自己研发视觉检测算法的方式,拒绝采用Mobileye的视觉技术。但是视觉技术上的积累,确实跟Mobileye还有一定差距。因此,两相对比,雷达模块的强势、摄像头的弱势,就导致了它们采用以雷达模块作为主模块,与VCAN通信,同时利用PCAN接收来自IFC的视觉目标信息,融合后用于纵向feature的控制。雷达模块之所以成为主模块,是因为有Safety相关的架构做在了雷达中。而这条技术路线中的IFC也有自己的特点,就是IFC本身并未降级为纯粹的传感器,模块里面仍旧保留了一些安全等级较低、且只依靠视觉感知就能工作的features,例如AHBC智能远光灯控制、LDW/LKA车道偏离报警及车道保持辅助等功能。由于IFC有功能,因此也需要连接至VCAN,跟车辆交互。关键词总结:强者不太强强、弱者不太弱的弱耦合型1R1V关系。
2. Power Moding - 电源模块设计需求(硬件实现)
- Power Moding强调硬件范畴;下文还会出现Power Mode Manager,强调软件范畴,指电源管理模块;
- 唤醒需求:IFC所在CAN网络上的所有ECU节点,在有持续高电压输入的情况下(即通信使能线Communication Enable Line),能够自动唤醒;
- 当通信使能线激活时(即处于高电平状态),IFC唤醒后,通信要hold下再开始通信(Bus Wakeup Delay Time),用来等待CAN总线初始化。当通信使能线关闭时(处于低电平状态),IFC应立即停止通信。
- 当通信使能线状态从低电平跳转到高电平后(即允许通信后),IFC应该在XXms之内进入正常通信状态。
3. Host MCU Section - 主MCU芯片部分
- MCU:Microcontroller Unit,微控制器单元,即单片机;
- Host MCU可通过SPI接口与其他SoC芯片建立通信、传输信号,例如EyeQ3芯片等;
- Host MCU接收的SPI信号主要包括以下几类:a.来自EyeQ3中的私有MCU的视觉信号;b.来自EyeQ3中的Fusion Tracker(融合跟踪器)的融合行人目标信息;c.来自ETSEL(目标筛选算法)的12个ACC目标(6静态6动态);d.来自ETSEL的2个FCW/AEB目标(1静1动)
- Host MCU中需要实现的软件模块包括:
1. PowerModeManager(电源模块管理者)
2. ConfigurationManager(配置管理者)
3. FeatureFunctions(功能和功能点),主要包括:a. LORS(即feature与host-sw的参数接口信息); b. 视觉features(LDW/LKA/TSR); c. 目标features(FSRA/FCW/AEB)
4. Environmental Conditions Evaluation / Heater Control (环境条件评估/加热控制): a. 温度处理; b.传感器遮挡处理; c. 镜头加热去雾控制; d. 内部状态处理
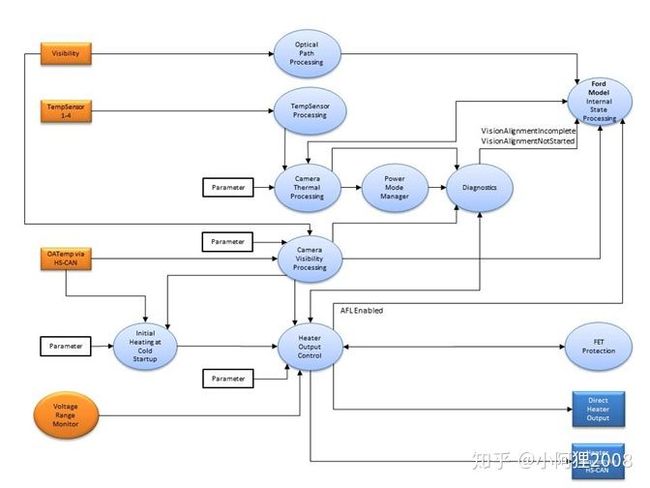
图2 环境条件评估数据流图示
a.温度处理:在Host MCU与EyeQ3芯片之间,布置了一个温度传感器;EyeQ3芯片上布置了两个温度传感器,一个靠近MIPS(充当MCU)核心,一个靠近VMP(矢量微码处理器);图像传感器位置,布置了一个温度传感器。利用温度传感状态机(Temperature Sensing State Machine)控制温度:
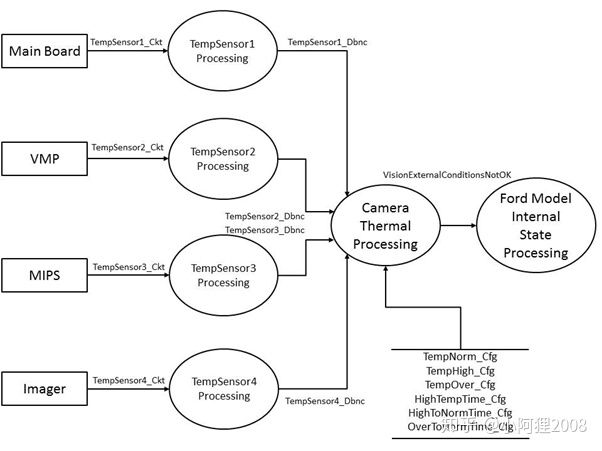
图3 温度感知数据流图示
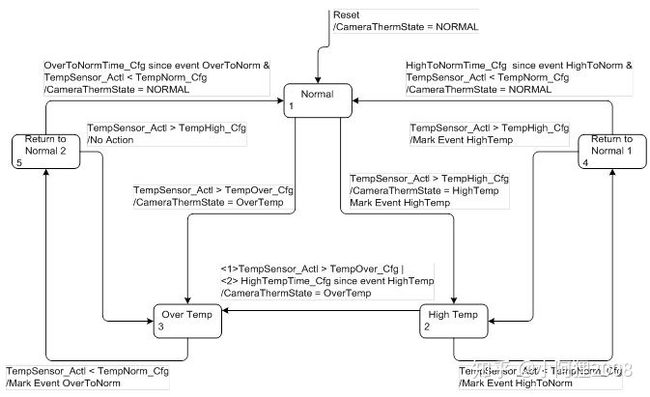
图4 温度感知状态机
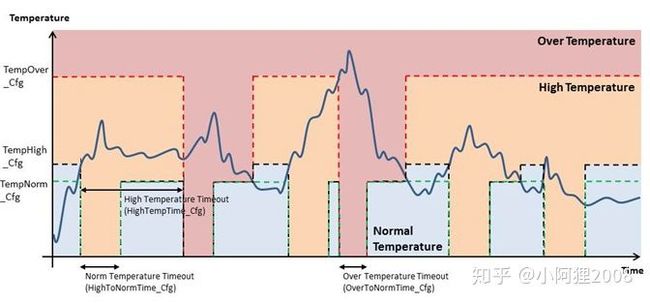
图5 温度状态迟滞现象
b.传感器遮挡:摄像头的遮挡需要合理的标定来匹配,遮挡时间可重新标定。同时要考虑雨刷状态、车速、阳光直射角度过低导致的反光等因素。一些重要的blockage参数需要底层SoC(EyeQ3)提供,例如:完全遮挡严重度等级、图像模糊严重度等级、液体飞溅斑点严重度等级、阳光直射角度过低导致反光的遮挡严重度等级、阳光衍射导致的遮挡严重度等级、大雾严重度等级、涂抹导致的遮挡严重度等级、自车开远光灯导致的视线炫目的严重度等级、根据目标融合算法-雷达报摄像头低可见度的严重度等级、雷达需要重新标定严重度影响、因为天气条件差-可见度低导致的图像涂抹严重度等级。白天时段(根据光照条件判断)摄像头开机后没有blockage的话,Blockage检测时间一般7分钟一个周期,假如开机后就存在部分blockage,那么每2分钟检测一次。夜晚时段,检测到部分blockage的话,每1分钟运行一次blockage算法;夜晚被检测到完全blockage的话,每15秒检测一次。
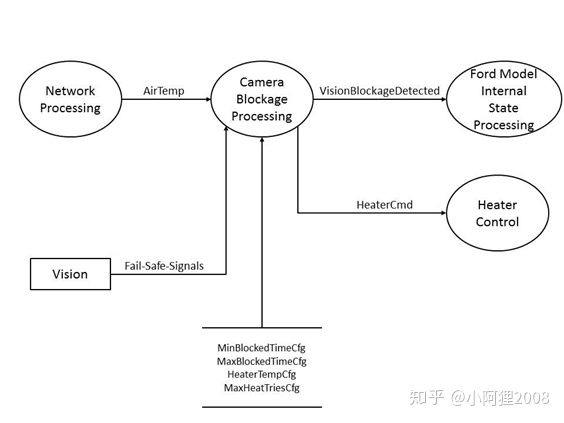
图6 遮挡模块与其他模块的关系
一旦检测到blockage,系统就会关掉feature功能,若温度低于一定阈值,还会打开加热功能,尝试排除有水雾造成的遮挡等因素。当然,假如并没有水雾,加热操作还是会继续进行,只不过这项操作没有实际效果而已。假如blockage消失,说明加热有效(正好蒙对了,确实是由于水雾造成的遮挡),则开启所有feature。假如加热无效,那么系统会进入临时blockage状态,并继续加热,同时再分配一定时间,看能否尝试解决(或者就是被动的等待,等待一些不知名的因素会在该时间内消失)。如果该时间段内问题仍未解决,则进入blockage状态,并通知驾驶员IFC发生遮挡。
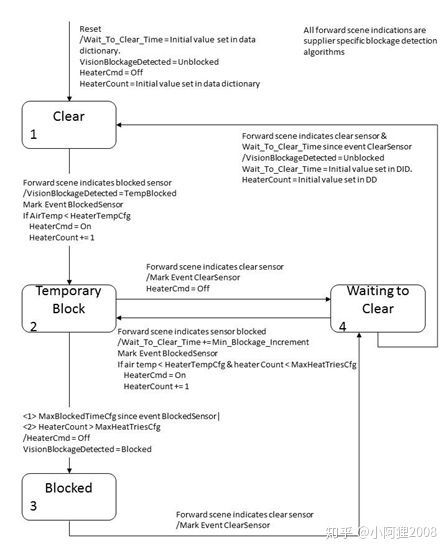
图7 Blockage状态机切换
c.光路处理:Optical Path Processing,Mobileye提供的接口(结构体)cads4_active_light_sensor_info_t中包含信号clearFieldOfView,coding值有0/1/2;0代表光路还未评估,1代表模糊不清,2代表光路畅通。
5. 诊断:诊断功能要做到Host MCU中;
6. 初始化完成状态确认:Host MCU需要有能力监控并确认EyeQ3芯片已经初始化完成并可用。EyeQ3中反馈自己初始化状态的接口为cads4_vision_application_init_info_t。
7. 标定/XML/Utility文件刷写功能:Host MCU需要实现标定文件/XML文件/Utility文件的刷写功能。
8. SPI通信接口:HOST MCU应该支持视觉信号/来自融合跟踪器中的行人信号/来自ETSEL算法中的、给ACC功能使用的12个目标信息(6静6动)/来自ETSEL算法中的、给FCW-AEB功能使用的2个目标信息(1静1动)。
9. 与前向毫米波雷达通信的私有CAN:Host MCU应该实现PCAN通信。
10. VCAN通信:Host应该实现与车辆CAN的通信。
11. XCP标定协议:Host要实现XCP协议。
12. 网关功能:Host要实现从VCAN转发数据给前向毫米波雷达的网关功能。
13. 传感器的EOL/Server/Online校准功能:Host MCU要实现三种传感器校准功能。
4. EyeQ3 MCU Section - EyeQ3 MCU芯片部分
EyeQ3是Mobileye公司的视觉处理芯片,属于一个多核的SoC(System on Chips, 片上系统芯片),包括4个MIPS和4个VMP。
MIPS:全称Microprocessor without Interlocked Piped Stages,无内部互锁流水级的微处理器,作为MCU,控制外围单元。
VMP:全称Vector Microcode Processor,矢量微码处理器,视觉算法运算核心。架构采用Transmeta全美达的VLIW架构。
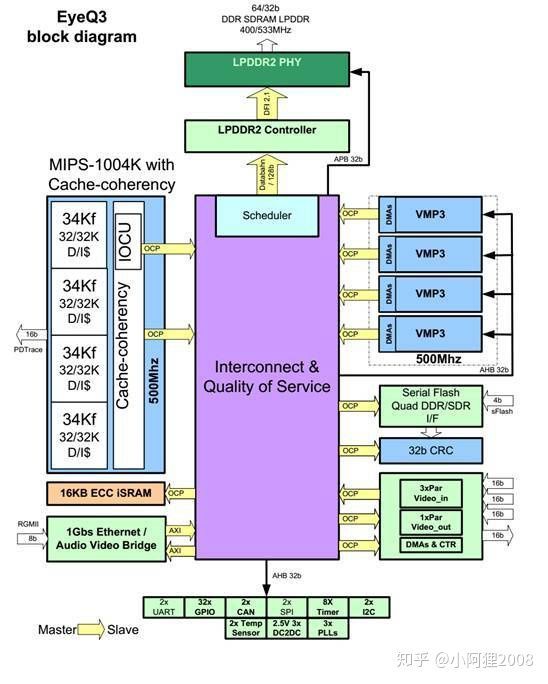
图8 EyeQ3内部框架图
a. EyeQ3的视觉算法:Mobileye在推广自己的视觉处理算法时,担心算法被抄袭,采用了算法固化在芯片中的方法,以卖芯片的方式卖算法。算法包括:图像处理、创建视觉轨迹、对视觉目标进行分类、与雷达跟踪片段(tracklets)匹配、供融合跟踪器使用的典型视觉跟踪信息等。
b. Tier1的VFP算法部分:如德尔福的ETSEL算法(Enhanced Target Selection,增强型目标选择算法)。
c. Tracklet-Tracker跟踪片段的跟踪器算法:该算法会接收128个目标,并处理成相关跟踪片段。跟踪片段的跟踪滤波器应采用笛卡尔等速加速运动模型。该算法的目的是提供持续的雷达信息。
d. Fusion-Tracker融合跟踪器:融合跟踪器从跟踪片段跟踪器中抓取跟踪片段,并从Mobileye视觉算法中抓取15个与能够与跟踪片段匹配的上的目标信息。之后将这15个融合后的目标信息传给ETSEL目标选择算法。具体地,算法通过雷达和视觉信息生成融合轨迹;对车辆目标使用CTCA模型(Coordinated Turn-Constant Acceleration motion model,协调转弯恒加速度运动模型)进行跟踪滤波,对非车辆目标信息使用CCA模型(Cartesian Constant Acceleration motion model,笛卡尔恒定加速度运动模型)进行跟踪滤波。对一些特定目标,将目标的轨迹与雷达跟踪片段进行关联融合,获得一条融合轨迹。融合轨迹可以有0到1个视觉轨迹以及0到15个雷达跟踪片段。轨迹滤波器一般将车辆目标的前脸和后脸的中心作为参考点。
e. ETSEL增强型目标选择算法:计算车辆侧滑状态;利用自车转向轨迹路径、前车运行轨迹来估算前方道路曲率和自车的heading angle;根据估算曲率获得自车前方车道的估算车道中心线;根据车道中线、计算每个目标的XOHP(X-Offset Host Path, 指前方其他车辆距离自车所在车道的车道中心线的距离);筛选12个动态和静态目标信息(6动6静给ACC,1动1静给FCW/AEB)。
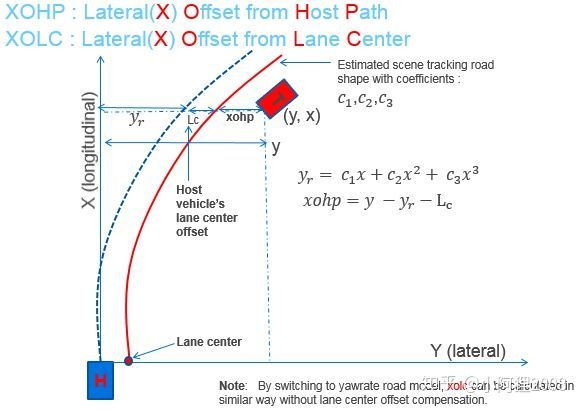
图9 XOHP和XOLC的定义
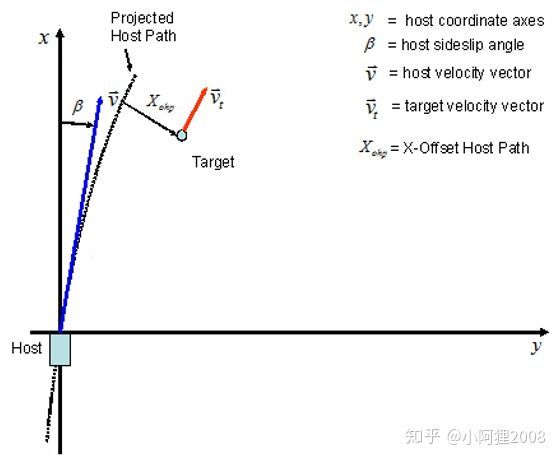
图10 XOHP详细定义

图11 XOLC详细定义
f. Mobileye视觉算法与Tier1的VFP之间的接口定义
g. 外部Flash和DDR
h. EyeQ3芯片与前毫米波雷达之间的PCAN通信接口
5. Component Functional Requirement 产品零部件需求
不再详细展开,主要是一些一般化的技术需求,例如电源需求、接地需求、ACC/AEB/LKA等功能的硬开关需求、产品外围架构原理图(如图12)、产品内部架构原理图(如图13)等。
6. Electrical Requirement 电子需求(硬件需求)
不再详细展开,主要是一些诸如:电气接口定义、微控制器通用需求(时钟频率、供电、Flash、数据刷写保护、NVM、调试、晶体和晶振)、静态电流牵引、EMC等需求。
7. Mechanical Requirement 机械需求
不再详细展开,主要是一些诸如:无铅制造要求、保型涂料(conformal coating)、外观、焊点(Solder Joints)、连接器(Connector)、包装、安装位置、固定等需求。
针对于镜头模组(Lens+Imager),无需使用保型涂料。
8. Dimensional Requirement 几何尺寸需求
不再详细展开,主要是一些诸如:产品尺寸、连接器的形状尺寸及PIN脚定义、产品在整车上的安装策略等需求。
9. General Software Requirement 通用软件需求
不再详细展开,主要是一些诸如:算力(Computing Resources)、检测目标和检测系统的状态权限定义(即通过UDS和XCP对系统进行诊断和标定等要求)、工厂/服务站等校准功能、基于模型的设计(这对feature的开发)等需求。
10. System Test Requirement 系统测试需求
TBD
10. Environment Requirement 环境需求
不再详细展开,主要是一些诸如:产品在整车的安装位置环境要求、产品运行环境(温度、相对湿度、气压)等需求。
11. Recyclability / Substance of Concern Requirement 可回收性和关注物质要求
TBD
12. Validation Requirement 验证需求
不再详细展开,主要是一些诸如:验证测试计划、EMC试验、VCRI(Validation Cross-Reference Index,验证交叉引用索引)、支持段(Supporting Paragraphs)、记忆完整性(Memory Integrity)需求等。
其中,验证测试计划需要覆盖上文规定的所有环境需求和机械需求;
VCRI表格,主要用于供应商定义验证步骤。包括分析、开发、验证的计划和对应的报告;
对于记忆完整性验证,所有的NVM需要在刷写过程中,接受至少500次的连接器的插拔测试,来验证记忆完整性需求。
13. Manufacturing Requirement 制造需求
不再详细展开,主要是一些诸如:MPI(Manufacturing Process Instructions,生产作业指导)文件创建需求、DFM(Design for Manufacture,可制造设计)需求、DFA(Design for Assembly,可组装设计)需求、PFMEA(过程FMEA)需求、可追溯性需求、老化(Burn-in)需求、焊接过程(Soldering Process)需求、搬运与成型(Handling & Singulation)需求、紧固件(Fasteners)需求、铸造(castings)需求、机械接口的防呆矩阵(Mechanical Interface Error-Proofing Matrix)需求、包装标签(Package Labeling)需求、测试需求。
14. Logistic Requirement 逻辑需求
TBD
15. Functional Safety Requirement 功能安全需求
后续详细展开。
16. Reliability Requirement 可靠性需求
主要包括:REP(Reliability Evaluation Point,可靠性评估点,一般要求10年或16万公里)、长期质量需求(如下表)、RPR(Reliability Performance Requirement,可靠性性能要求,一般要求大于0.97)、可靠性测试需求。

表1 长期质量需求表
17. Quality Requirement 质量需求
主要包括:DFMEA需求、质量计划、P-Diagram(参数图表)、PPAP质量要求等。
18. Serviceability Requirement 可维护性需求
主要包括:产品维护需求、产品维修需求(即诊断通信,CAN Diagnostic)、产品更换需求、4S店工程需求、交付活动(Delivery Activities)等需求。