Unity3d-旋转Quaternion、Matrix4x4、 Euler
矩阵:Matrix4x4
namespace UnityEngine
{
public struct Matrix4x4
{
public float m00;
public float m10;
public float m20;
public float m30;
public float m01;
public float m11;
public float m21;
public float m31;
public float m02;
public float m12;
public float m22;
public float m32;
public float m03;
public float m13;
public float m23;
public float m33;
}
}变换后点的(X’,Y’,Z’)= (x,y,z) * ( 4*4矩阵)

scale:模型的大小变化,在透视投影中用来产生场景深度效果

public static Matrix4x4 Scale(Vector3 v)
{
return new Matrix4x4
{
m00 = v.x,
m01 = 0f,
m02 = 0f,
m03 = 0f,
m10 = 0f,
m11 = v.y,
m12 = 0f,
m13 = 0f,
m20 = 0f,
m21 = 0f,
m22 = v.z,
m23 = 0f,
m30 = 0f,
m31 = 0f,
m32 = 0f,
m33 = 1f
};
}translate:物体沿着三个坐标轴的任意一个到另一个位置的移动

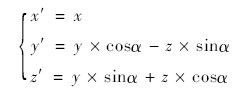
rotate:顶点的每个坐标值乘上θ角(物体旋转的角度)的sin或cos值就得到了旋转后的坐标
当点P(x,y,z)绕X轴旋转α度时,点P的x坐标值不变,其旋转前后的坐标关系为:
当点P(x,y,z)绕Y轴旋转β度时,点P的y坐标值不变,其旋转前后的坐标关系为:

当点P(x,y,z)绕Z轴旋转γ度时,点P的z坐标值不变,其旋转前后的坐标关系为:
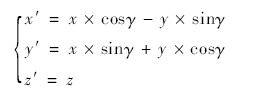
得出的变换矩阵如下

在unity中Matrix4x4没有单独实现translate和rotate的方法,统一使用SetTRS方法来完成
参见另一篇文章:平移、旋转和缩放矩阵
四元数:Quaternion = (xi + yj + zk + w ) = (x,y,z,w).
四元数是最简单的超复数。 复数是由实数加上元素 i 组成,其中i^2 = -1。 相似地,四元数都是由实数加上三个元素 i、j、k 组成,而且它们有如下的关系: i^2 = j^2 = k^2 = -1 , 每个四元数都是 1、i、j 和 k 的线性组合,即是四元数一般可表示为w + xi + yj + zk,其中x、y、z 、w是实数
namespace UnityEngine
{
public struct Quaternion
{
public float x;
public float y;
public float z;
public float w;
}
}
四元数中的方向由三个旋转轴(x、y、z)和一个旋转角 (w) 确定
q = cos(A/2)+sin(A/2)*(x*i+y*j+z*k)
Q.w = cos (angle / 2)
Q.x = axis.x * sin (angle / 2)
Q.y = axis.y * sin (angle / 2)
Q.z = axis.z * sin (angle / 2)
四元数可提供平滑差值,没有Euler旋转的万向锁。
四元数到矩阵
public void SetTRS(Vector3 pos, Quaternion q, Vector3 s)
Quaternion q = Quaternion.LookRotation(new Vector3(0,0.5,1));
Matrix4x4 rot = new Matrix4x4();
rot.SetTRS(new Vector3(0,0,0),q,new Vector3(1,1,1));矩阵到四元数
public void SetLookRotation(Vector3 view, [DefaultValue("Vector3.up")] Vector3 up)
Matrix4x4 rot = new Matrix4x4();
rot.SetTRS(new Vector3(0,0,0),q,new Vector3(1,1,1));
Vector4 vy = rot.GetColumn(1);
Vector4 vz = rot.GetColumn(2);
Quaternion newQ = Quaternion.LookRotation(new Vector3(vz.x,vz.y,vz.z),new Vector3(vy.x,vy.y,vy.z));
//newQ==q这个函数建立一个旋转使z轴朝向view y轴朝向up
var obj1: Transform;
var obj2: Transform;
var q:Quaternion;
q.SetLookRotation(obj1.position, obj2.position);
transform.rotation=q;
然后大家拖动obj1和obj2就可以看到物体永远保持z轴朝向obj1, 并且以obj2的位置来保持y轴的倾斜度。
欧拉角:Euler
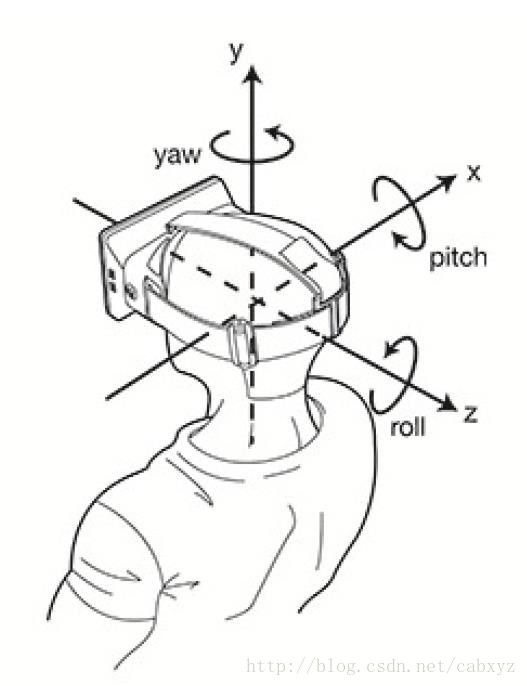
欧拉旋转,我们最常用的旋转方法应该是使用yaw, roll和pitch。
yaw是在XZ轴平面上围绕Y轴左右旋转,当开车时使用的是yaw。
pitch在YZ轴平面上围绕X轴上下旋转,喷气机飞行或爬坡时用pitch向上或向下。
roll是在XY轴平面上绕Z轴倾斜旋转,
从字面意思上说,当你驾驶汽车高速急转弯时,你的汽车会出现roll运动,表现一个方向就可以通过三个欧拉角 (α,β,γ) 来定义。
游戏物体的属性视图中调整的角度就是欧拉角

Quaternion q3 = new Quaternion();
q3.eulerAngles = new Vector3(10, 30, 20);
Quaternion qx3 = Quaternion.AngleAxis(10,Vector3.right);
Quaternion qy3 = Quaternion.AngleAxis(30,Vector3.up);//绕y轴旋转30度
Quaternion qz3 = Quaternion.AngleAxis(20,Vector3.forward);
Quaternion qxyz3 = qz3*qy3*qx3;上面的代码可以得到q3和qxyz3值一样。从这里可以看出unity中旋转顺序也是按先绕x轴旋转,然后y,最后z。unity中对向量应用旋转量使用的是向量右乘,即如下:
Vector3 newV = qxyz3*v=qz3*qy3*qx3*v;
// A rotation 30 degrees around the y-axis
//绕y轴旋转30度
var rotation = Quaternion.Euler(0, 30, 0);
//返回一个旋转角度,绕z轴旋转z度,绕x轴旋转x度,绕y轴旋转y度(像这样的顺序)。欧拉角eulerAngles在Unity3D是一个Vector3类的变量,官方约定俗成的层级关系是ZXY,即最里层是Z轴先旋转,中间层是X轴,最外层是Y轴。
unity中的欧拉角有两种方式可以解释:
1,当认为顺序是yxz时(其实就是heading - pitch - bank),是传统的欧拉角变换,也就是以物体自己的坐标系为轴的。
2,当认为顺序是zxy时(roll - pitch - yaw),也是官方文档的顺序时,是以惯性坐标系为轴的。后者比较直观一些,但其实两者的实际效果是一样的,只是理解不一样。
无论以何种方式旋转三个轴,都会有出现万向锁的情况,万向锁主要在动画里面旋转时出现我们不希望见到的旋转路径,所以官方以ZXY顺序来旋转的时候可以最大程度上避免普通情况下会出现的万向锁。
对比:
| 各方法比较 | Matrix4x4 | Euler | Quaternion |
|---|---|---|---|
| 在坐标系间(物体和惯性)旋转点 | 能 | 不能(必须转换到 矩阵) | 不能(必须转换到矩阵) |
| 连接或增量旋转 | 能能,但经常比四元数慢,小心矩阵蠕变的情况 | 不能 | 能,比矩阵快 |
| 插值 | 基本上不能 | 能,但可能遭遇万 向锁或其他问题 | Slerp提供了平滑插值 |
| 易用程度 | 难 | 易 | 难 |
| 在内存或文件中存储 | 9个数 | 3个数 | 4个数 |
| 对给定方位的表达方式是否唯一 | 是 | 不是,对同一方位 有无数多种方法 | 不是,有两种方法 |
| 可能导致非法 | 矩阵蠕变 | 任意三个数都能构成合法的欧拉角 | 可能会出现误差积累,从而产生非法的四元数 |