ROS基础学习笔记(五):自定义消息练习以及订阅者发布者节点代码简介
ROS中我们自定义的消息文件以".msg"作为后缀名,我们在功能包文件夹下新建msg文件路径,并且在其中:
vim Hello.msgstring Hello //定义消息
int64 Count //定义数据返回到功能包文件夹下的src文件夹中
vim TheTalker2.cpp#include
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "rostest2/Hello.h"
/*
This header file is created by ROS with Config information
*/
int main(int argc , char ** argv)
{
ros::init( argc , argv , "talker");
/*
named node "talker" and initialize it
*/
ros::NodeHandle nh;
/*
get a node handle to operate the package
*/
ros::Publisher Sender = nh.advertise( "Sender" , 1000 );
/*
PAY ATTENTION!!! You should use
package::.msg file's name!!
named a Sender to be Publisher and give
it node handle , the length of queue is
1000 , if too long then quit
*/
ros::Rate loop_rate(10);
/*
wait for 10 hz each times,equals 100ms
*/
int count = 0;
rostest2::Hello msg;
while( ros::ok )
{
std::stringstream ss;
ss << "Hello World by sender: " ;
msg.Hello = ss.str();
msg.Count = count;
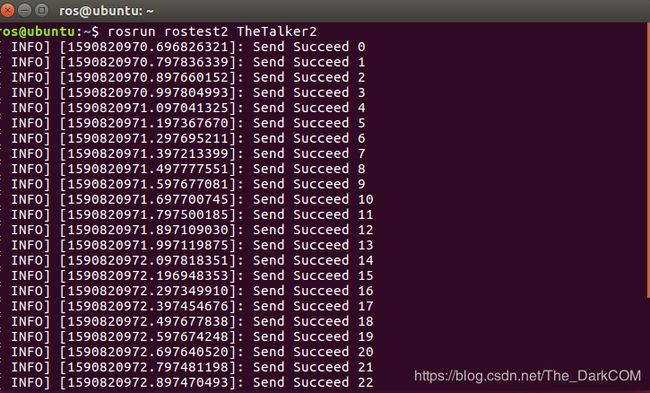
ROS_INFO( "Send Succeed %d" , count );
Sender.publish(msg);
ros::spinOnce();
loop_rate.sleep();
count++;
}
return 0;
} vim TheListener2.cpp#include "ros/ros.h"
#include "std_msgs/String.h"
#include "rostest2/Hello.h"
void SenderCallback( const rostest2::Hello::ConstPtr& msg )
{
/*
When Sender sending a message , this founction will do something
ROS_INFO will misunderstand what you want to say , so , remember
add ".c_str()" to transfer format
*/
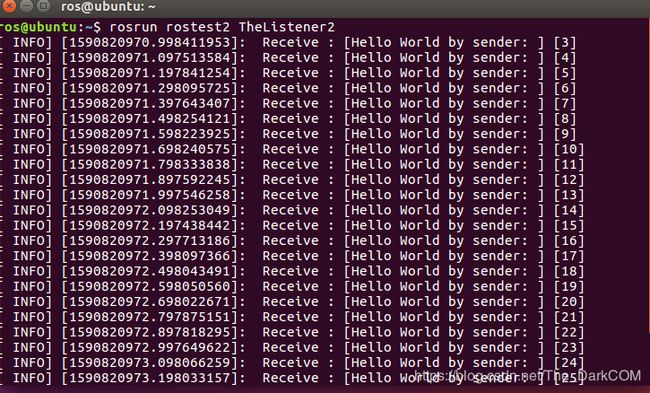
ROS_INFO( " Receive : [%s] [%d] " , msg->Hello.c_str() , msg->Count );
}
int main( int argc , char ** argv )
{
ros::init( argc , argv , "Receiver" );
/*
named node "Receiver" and initialize it
*/
ros::NodeHandle nh;
/*
get a node handle to operate the package
*/
ros::Subscriber rec = nh.subscribe( "Sender" , 1000 , SenderCallback );
/*
named a rec to be Subscriber and give
it node handle , the length of queue is
1000 , if too long then quit
*/
ros::spin();
/*
if there are no message , just wait .
*/
return 0;
}
上次讲到这里就结束了,但其实还有两个重要的文件需要修改,分别是CMakelist.txt 和package.xml , 用于添加依赖辅助编译
vim package.xmlmessage_generation
......
message_generation
......
message_runtime 看到这一堆depend,想必就不用多说了吧
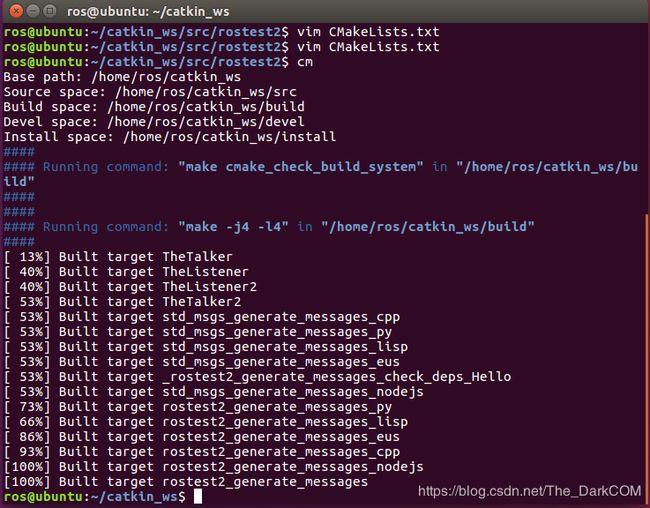
vim CMakeLists.txt剩下的部分由于太过冗长,仅挑选必要部分列出,ROS生成的源文档中这些大部分都被注释,只需删除注释符号并补充部分内容即可
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
/*
All of these files is the ROS system dependencies at compile time,
but we haven't used message_generation when we create package
*/add_message_files(
FILES
Hello.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES rostest2
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
DEPENDS system_lib
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable( TheTalker2 src/TheTalker2.cpp)
add_executable( TheListener2 src/TheListener2.cpp)
//add our filestarget_link_libraries( TheTalker2 ${catkin_LIBRARIES} )
target_link_libraries( TheListener2 ${catkin_LIBRARIES} )
这些都编辑完成后任务就结束啦,下面编译一下,可使用之前定义的cm命令或者cd ~/catkin_ws , catkin_make