ROS学习笔记#基础篇#(三)——ROS通信机制
目录
- 一、计算图级
- 1.1 关键概念
- 1.2 理解节点(Node)
- 二、通信方式
- 2.1 话题(Topic)
- 2.1.1 话题的概念
- 2.1.2 话题的消息文件(.msg)
- 2.1.3 话题的示例
- 2.2 服务(Service)
- 2.2.1 服务的概念
- 2.2.2 服务的消息文件(.srv)
- 2.2.3 服务的示例
- 2.3 动作(Action)
- 2.3.1 动作的概念
- 2.3.2 动作的消息文件(.action)
- 2.4 参数(Parameter)
- 2.4.1 参数的概念
- 2.4.2 参数的示例
- 三、总结
一、计算图级
1.1 关键概念
计算图是ROS处理数据的一种点对点的网络形式。程序运行时,所有进程以及他们所进行的数据处理,将会通过一种点对点的网络形式表现出来,包括以下几个重要概念:
- 节点(
Node)
一个节点其实只不过是ROS程序包中的一个可执行文件,ROS节点之间可以通过多种通信机制进行通信。 - 主节点(
Master)
主节点负责管理节点到节点的连接和消息通信,故亦可称“节点管理器”,通过roscore命令即可启动。 - 话题(
Topic)
话题(亦可称为“主题”)是一种单向通信方式。 - 服务(
Service)
服务是一种 请求Request– 响应Response式 的双向通信方式。 - 动作(
Action)
动作是一种 目标Goal– 结果Result– 反馈Feedback式 的双向通信方式。 - 消息(
Message)
消息是节点之间通信的数据结构。 - 包(
Bag)
用户可以保存ROS中发送和接收的消息的数据,这时用于保存的文件以*.bag作为文件扩展名。
1.2 理解节点(Node)
先了解一下节点Node操作命令rosnode的用法:
| 命令 | 说明 |
|---|---|
| rosnode ping | test connectivity to node |
| rosnode list | list active nodes |
| rosnode info | print information about node |
| rosnode machine | list nodes running on a particular machine or list machines |
| rosnode kill | kill a running node |
| rosnode cleanup | purge registration information of unreachable nodes |
一个节点其实只不过是ROS程序包中的一个可执行文件,ROS节点可以使用ROS客户端库(rospy、roscpp等)与其他节点通信,可以发送或接收消息Message。
首先你已经根据 搭建ROS开发环境教程 创建catkin工作空间,并启动ROS:
$ roscore
再新开一个终端,并使用rosnode list查看当前存在的节点Node:
$ rosnode list
/rosout
可见此时仅存在1个节点rosout,rosout节点用于收集和记录节点调试输出信息,所以它总是在运行的。
启动Turtle例程:
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
注意:执行以上命令均需新开一个终端并配置ROS环境变量
使用rosnode list查看当前存在的节点Node:
$ rosnode list
/rosout # rosout节点用于收集和记录节点调试输出信息,所以它总是在运行的
/teleop_turtle # turtle_teleop_key的节点
/turtlesim # turtlesim_node的节点
也可以借助可视化工具rqt_graph便于直观理解:
$ rqt_graph
Hide一栏不勾选debug:

上图中椭圆框即为节点Node,节点之间的箭头说明它们之间存在通信,箭头上的备注即为话题Topic。
二、通信方式
ROS使用的通信方式包括 话题Topic、服务Service、动作Action,此外,某种意义上 参数Parameter 也可认为是一种通信方式。下面将对这4种通信方式进行详细介绍:
2.1 话题(Topic)
先了解一下话题Topic操作命令rostopic的用法:
| 命令 | 说明 |
|---|---|
| rostopic bw | display bandwidth used by topic |
| rostopic delay | display delay of topic from timestamp in header |
| rostopic echo | print messages to screen |
| rostopic find | find topics by type |
| rostopic hz | display publishing rate of topic |
| rostopic info | print information about active topic |
| rostopic list | list active topics |
| rostopic pub | publish data to topic |
| rostopic type | print topic or field type |
以下内容参考 ROS官方教程 | 理解ROS话题。
2.1.1 话题的概念
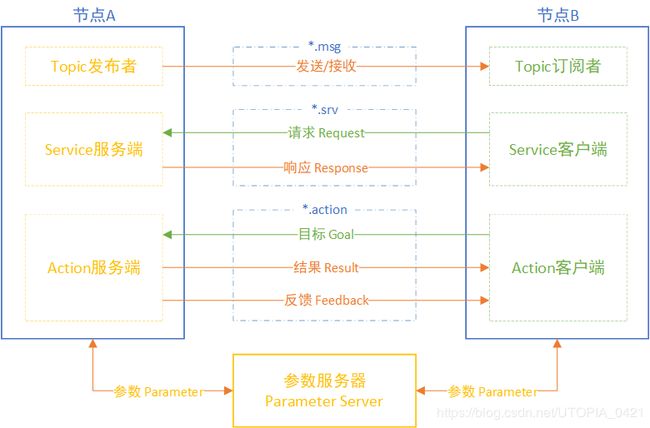
话题Topic是一种单向通信方式, 其中发布消息的节点称为发布者Topic-Publisher,而接收消息的节点称为订阅者Topic-Subscriber。
如上图所示,节点A和节点B分别到主节点Master注册为Topic-Publisher和Topic-Subscriber。在主节点master的管理下,节点A发布Topic,节点B订阅该Topic,实现节点A到节点B的单向通信。
2.1.2 话题的消息文件(.msg)
msg文件是用于话题的消息文件,扩展名为*.msg。相关操作命令为rosmsg:
| 命令 | 说明 |
|---|---|
| rosmsg show | Show message description |
| rosmsg info | Alias for rosmsg show |
| rosmsg list | List all messages |
| rosmsg md5 | Display message md5sum |
| rosmsg package | List messages in a package |
| rosmsg packages | List packages that contain messages |
msg文件是最简单的消息文件,只需定义Topic-Publisher到Topic-Subscriber的消息的数据结构,以下文的geometry_msgs/Twist为例:
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
2.1.3 话题的示例
继续1.2节的内容,使用rqt_graph可视化工具,将鼠标放到箭头上会有高亮显示:
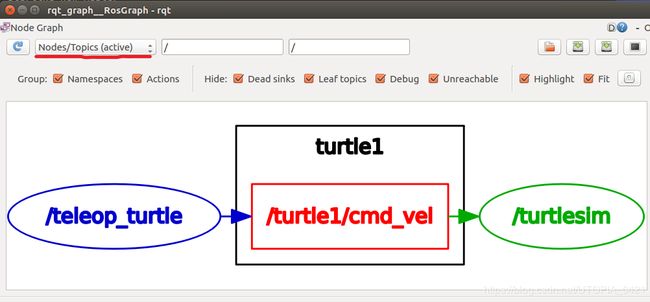
可知turtle1为主节点Master,/turtle1/cmd_vel为话题Topic,其中/teleop_turtle为发布者Topic-Publisher,/turtlesim为订阅者Topic-Subscriber。我们也可以使用rostopic来进行操作:
- 查看当前存在的
Topic:
$ rostopic list
/rosout
/rosout_agg
/statistics
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
- 查看话题
/turtle1/cmd_vel的具体信息:
$ rostopic info /turtle1/cmd_vel
Type: geometry_msgs/Twist
Publishers:
* /teleop_turtle (http://ubuntu:35093/)
Subscribers:
* /turtlesim (http://ubuntu:35745/)
- 查看话题
/turtle1/cmd_vel的消息类型:
$ rostopic type /turtle1/cmd_vel
geometry_msgs/Twist
查看该消息类型msg的详细定义:
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
- 查看话题
/turtle1/cmd_vel发布的消息:
$ rostopic echo /turtle1/cmd_vel
此时需要选中运行turtle_teleop_key终端,按下方向键,rostopic终端会输出/teleop_turtle发布的消息,类似如下内容:
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
- 向节点
/turtlesim发布消息:
发送1条消息便退出:
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
按照固定的频率发布消息:
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
可以看到ROS小乌龟进行圆周运动:

2.2 服务(Service)
先了解一下话题Service操作命令rosservice的用法:
| 命令 | 说明 |
|---|---|
| rosservice args | print service arguments |
| rosservice call | call the service with the provided args |
| rosservice find | find services by service type |
| rosservice info | print information about service |
| rosservice list | list active services |
| rosservice type | print service type |
| rosservice uri | print service ROSRPC uri |
以下内容参考 ROS官方教程 | 理解ROS服务和参数。
2.2.1 服务的概念
服务通信是双向的,它不仅可以发送消息,同时还会有反馈。一个服务Service被分成服务端Service-Server和客户端Service-Client,其中服务端只在有请求Request的时候才响应Response,而客户端会在发送请求后接收响应,这样通过类似“请求-应答”的机制完成整个服务通信。
与话题Topic不同,服务Service是一次性消息通信。因此,当服务的请求和响应完成时,两个连接的节点将被断开。服务Service通常被用作请求机器人执行特定操作时使用的命令,或者用于根据特定条件需要产生事件的节点。由于它是一次性的通信方式,又因为它在网络上的负载很小,所以它也被用作代替话题的手段,因此是一种非常有用的通信手段。
如上图所示,节点A和节点B分别到主节点Master注册为服务的服务端Service-Server和客户端Service-Client。在主节点Master的管理下,节点B(客户端)向节点A(服务端)发送请求,节点A响应该请求,实现节点之间的双向通信。
2.2.2 服务的消息文件(.srv)
srv文件是服务使用的消息文件,扩展名为*.srv。相关操作命令为rossrv:
| 命令 | 说明 |
|---|---|
| rossrv show | Show service description |
| rossrv info | Alias for rossrv show |
| rossrv list | List all services |
| rossrv md5 | Display service md5sum |
| rossrv package | List services in a package |
| rossrv packages | List packages that contain services |
由于服务是双向的,所以需定义请求与响应两个部分,以下文的turtlesim/Spawn为例:
$ rossrv show turtlesim/Spawn
float32 x
float32 y
float32 theta
string name # 服务的客户端请求的数据结构
--- ---
string name # 服务的服务端响应的数据结构
请求与响应的数据结构用---分隔。
2.2.3 服务的示例
继续2.1.3节的内容,使用rosservice list查看当前存在的Service:
$ rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/rqt_gui_py_node_22277/get_loggers
/rqt_gui_py_node_22277/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
可见当前存在多个Service,下面以clear, spawn这2个服务示例:
使用rosservice type查看clear的消息Message类型:
$ rosservice type clear
std_srvs/Empty
可见该服务的类型为空(Empty),这表明在调用这个服务是不需要参数(比如,请求不需要发送数据,响应也没有数据)。下面我们使用rosservice call命令调用服务,因为服务类型是空,所以进行无参数调用:
$ rosservice call clear
便清除了turtlesim_node的背景上的轨迹
再来使用rosservice type查看spawn的消息类型srv:
$ rosservice type spawn
turtlesim/Spawn
$ rossrv show turtlesim/Spawn
float32 x
float32 y
float32 theta
string name # 服务的客户端请求的数据参数
--- ---
string name # 服务的服务端响应的数据参数
这个服务使得我们可以在给定的位置和角度生成一只新的乌龟。名字参数是可选的,这里我们不设具体的名字,让turtlesim自动创建一个。
$ rosservice call spawn 2 2 0.2 ""
name: "turtle2"
可见服务返回了新产生的乌龟的名字为turtle2,如下图:

2.3 动作(Action)
以下内容参考 ROS官方Wiki | actionlib。
2.3.1 动作的概念
与服务Service非常相似,动作Action具有与请求和响应分别对应的目标Goal和结果Result,除此之外动作中还多了反馈Feedback。如下图:
Action本质上是基于Topic的扩展,目标Goal、结果Result、反馈Feedback是通过Topic接口实现的。主要弥补了Service通信的一个不足,如果Service的请求迟迟得不到响应,将会导致消息阻塞。而Action可以查看状态进度,也可以终止请求,所以适合用于长时间的任务。
2.3.2 动作的消息文件(.action)
action消息文件是动作中使用的消息文件,它使用*.action扩展名,与msg和srv不同,它不是一个比较常见的消息文件,也没有专有的命令行操作。下文以Fibonacci.action 为例:
$ roscd actionlib_tutorials
$ cat action/Fibonacci.action
#goal definition
int32 order
---
#result definition
int32[] sequence
---
#feedback
int32[] sequence
目标、结果、反馈的数据结构用---分隔。
2.4 参数(Parameter)
先了解一下参数Parameter操作命令rosparam的用法:
| 命令 | 说明 |
|---|---|
| rosparam set | set parameter |
| rosparam get | get parameter |
| rosparam load | load parameters from file |
| rosparam dump | dump parameters to file |
| rosparam delete | delete parameter |
| rosparam list | list parameter names |
注:rosparam使用YAML标记语言的语法。
2.4.1 参数的概念
与上文提到的通信方式不同,参数也可以说是特殊的“通信方式”。特殊点在于参数服务器是节点存储参数的地方,可以认为参数Parameter是节点中使用的全局变量。参数服务器使用网络传输,在节点管理器Master中运行,实现整个通信过程。
2.4.2 参数的示例
继续2.2.3节的内容,使用rosparam list查看当前存在的Parameter:
$ rosparam list
/background_b
/background_g
/background_r
/rosdistro
/roslaunch/uris/host_ubuntu__35757
/rosversion
/run_id
获取与设置参数:
$ rosparam get / #获取所有参数
background_b: 255
background_g: 86
background_r: 69
#其它省略...
$ rosparam get /background_r #获取特定参数
69
$ rosparam set background_r 150 #设置背景色中Red值为150
$ rosservice call clear #调用清除服务使得修改后的参数生效
如下图,背景色发生了变化:

三、总结
ROS存在多种通信方式,总结如下:
| 类型 | 方向 | 同/异步 | 备注 | 使用场景 |
|---|---|---|---|---|
话题Topic |
单向 | 异步 | 连续单向地发送/接收数据 | 实时性、周期性的消息 |
服务Service |
双向 | 同步 | 请求Request – 响应Response |
临时而非周期性的消息,应避免消息阻塞 |
动作Action |
双向 | 异步 | 目标Goal – 结果Result – 反馈Feedback |
长时间的任务,解决服务Service消息阻塞的问题 |
参数Parameter |
双向 | 异步 | 可以认为Parameter是节点中使用的全局变量 |
配置文件 |
如下图:
ROS学习资源推荐:
[1] ROS Wiki
[2] ROS Robot Programming (EN) / ROS机器人编程 (CN)
[3] 机器人操作系统入门(MOOC课程)
[4] 古月居博客 推荐阅读ROS探索总结专栏
记录学习所得,如有错误,欢迎指正。
如有侵权,联系删除。