全国大学生智能汽车竞赛-室外光电组无人驾驶挑战赛-2019
全国大学生智能汽车竞赛-室外光电组无人驾驶挑战赛-2019
赛事简介链接:钢铁侠教育平台:http://www.artrobot.com/h-col-114.html
钢铁侠科技_伍门学院:http://www.wmcollege.club/
ROS教育基金会:http://www.roseducation.org/
实验楼:https://www.shiyanlou.com/
串口资料:
1. https://github.com/wjwwood/serial
2. https://github.com/garyservin/serial-example
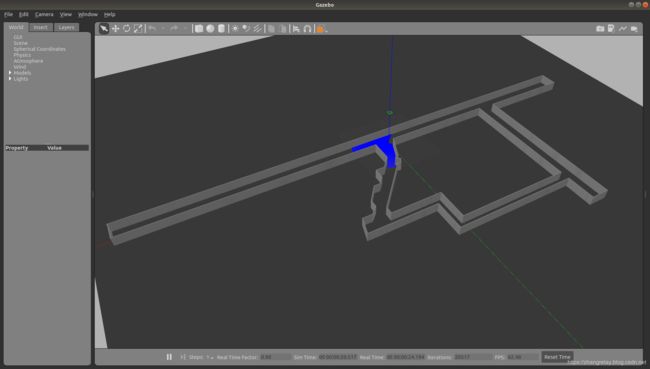
仿真赛测试环境:
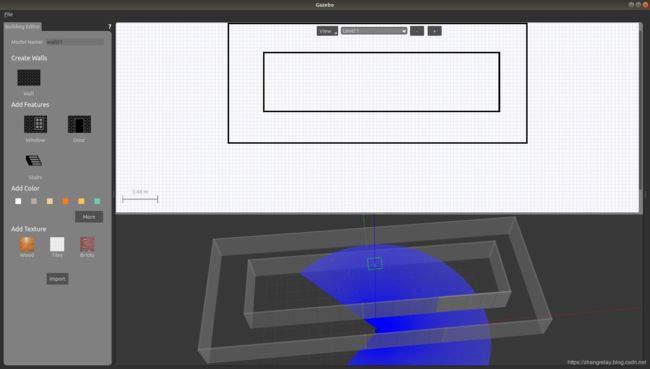
环境搭建

环境测试
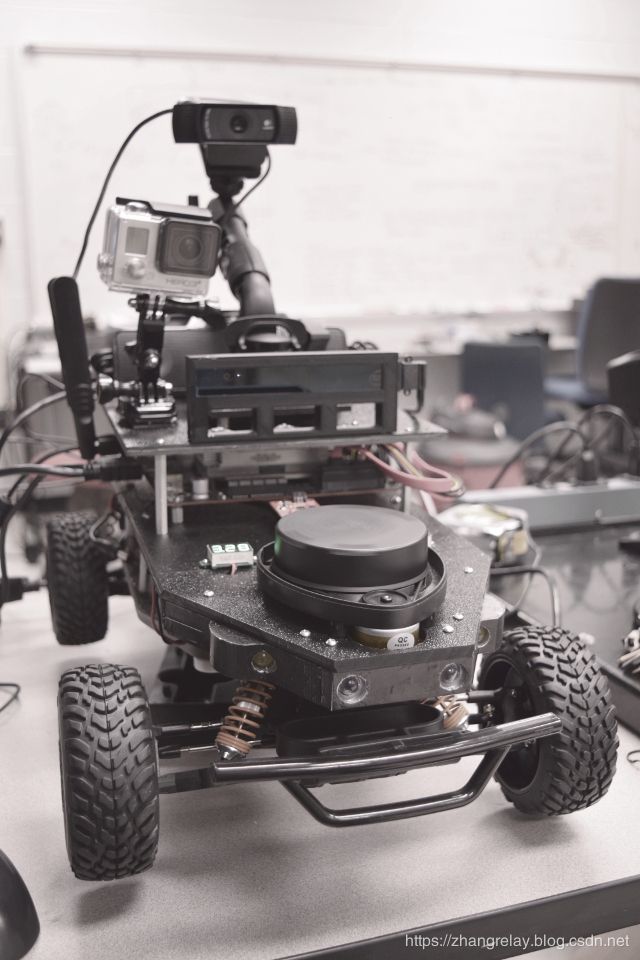
实车测试
MIT小车室内测试
竞速小车仿真环境
严格意义上来说,这是racecar不是smartcar或intelligent vehicle,为竞速小车并非智能小车。
赛事起源,参考如下介绍,分为大学本科和高中组。
参考链接:http://fast.scripts.mit.edu/racecar/courses/
课程(MIT 2015-2016)
到目前为止,RACECAR平台已用于麻省理工学院三个课程。对于高中生来说,在2016年夏天已经完成。所有课程都使用强大的RACECAR平台,功能技术讲座和实验练习,最终将完全自主地在现实环境中进行比赛。
2015年1月:Hackathon 1
该课程的第一次提供是在2015年1月作为麻省理工学院独立活动期(IAP)课程。团队使用了RACECAR的第一个版本。他们将小车编程为完全自主地在麻省理工学院的走道中进行比赛。
2016年1月:Hackathon 2
第二次黑客马拉松于2015年1月举行。小车更新了新硬件,包括Nvidia Jetson TX 1电脑,目标是更快速度。
2016年春季:麻省理工学院本科课程
麻省理工学院的机器人课程名为“机器人:科学与系统”(6.141/16.405),用RACECAR平台教授机器人技术。讲座教授机器人技术的基础。实验练习允许学生练习构建感知软件以及运动规划和控制软件的技能。现在的挑战包括障碍和地板标记,为团队赢得额外积分。它已经于2016年5月结束。
2016年夏季:高中生机器人课程
RACECARs将由高中学生2016年完成,课程内容类同本科课程,以团队协作和项目学习为核心。
国内高中组课程由TechX提供,具体可网络查询相关信息。
麻省理工学院海狸工程暑期学院(BWSI)是一个针对高中生的暑期课程,旨在探索团队合作和基于项目的学习。在第一年,该计划提供了一个机器人课程,模仿麻省理工学院的本科机器人学科6.141/16.405。
这个为期4周的课程招收了来自美国各地的46名高中生。学生们学习了机器人技术的基础,并使用RACECAR平台在实验室练习相应的技能。
教学还包括关于团队合作,协作和技术交流的主题。学生们受益于来自麻省理工学院,林肯实验室,科技行业和蓬勃发展的机器人创业世界的研究人员,企业家和创新者提供的日常技术研讨会。
之后,学生们开展了一项具有挑战性的项目:编写一款自动驾驶迷你赛车!
赛车必须快速行驶,从相机图像中检测标记并根据标记颜色做出决定。
学生们以五人一组的形式工作,需要自己设计并实现了所有软件。
竞速小车推荐源码学习链接:
1. Implementation of the CNN from End to End Learning for Self-Driving Cars
on a Nvidia Jetson TX1 using Tensorflow and ROS
https://github.com/DJTobias/Cherry-Autonomous-Racecar
2. Rapid Autonomous Complex-Environment
Competing Ackermann-steering Robot
https://github.com/mit-racecar

3. Low-cost, high speed (600USD, 3 m/s)
1/10 Autonomous ROS RaceCar (with tutorial for beginner)
https://github.com/Hypha-ROS/hypharos_racecar

4. 第十四届全国大学生智能汽车竞赛室外光电竞速创意赛
ART-Racecar
https://github.com/ART-Robot-Release/racecar
仿真的重要性!!!
引用:
- https://github.com/mit-racecar/racecar_gazebo
- https://github.com/mit-racecar/racecar_simulator
gazebo与rviz并非是对应的,只做示意演示。

算法的重要性!!!
引用:
- https://github.com/Hypha-ROS/hypharos_minicar
- https://hypharosworkshop.wordpress.com/
下文仅供参考,需要具体资料,参考如上链接!!!
需要深入学习并理解传统控制(如PID)与先进控制(如MPC)之间的差异。
HyphaROS MiniCar(1/20尺寸MPC赛车)
摘要
低成本、高速1/20赛车用于控制算法评估!
完全开源(硬件和软件),总成本<300美元(或<2000元人民币)。
目前支持:Pure-Pursuit、Model-Predictive-Control模型预测控制(非线性)

关于HyphaROS
开发者:
- HaoChih, LIN(中国台湾,现在ETH苏黎世联邦理工学院)
日期:2018/08/16
许可证:Apache 2.0
特征描述
- 基于非线性小车模型的MPC(通过ipopt求解器)
- Pure-Pursuit控制器
- 板载地图构建模式支持(Gmapping、Hector-SLAM、Karto-SLAM、MRPT-ICP)
- STM32用于电机速度闭环控制
- AMCL定位(基于编码器 - 测距法)
- 动态避障
- stage仿真模拟(支持:MPC和Pure-Pursuit)
路线图展望
- 添加EKF支持(使用mpu6050测距)
- MPC用于避障
- 在不同的求解器上实现MPC(ACADO、OSQP等)
- 多辆赛车通过ROS 2.0控制赛车(目前为ROS 1.0)
- 高速漂移
硬件
- Odroid XU4
(参考:Ref: https://www.hardkernel.com/main/products/prdt_info.php) - YDLidar X4
(参考:Ref: http://www.ydlidar.com/product/X4 ) - STM32(F103)MCU(带OLED显示屏)
- 带A / B编码器的差动电机(res:340)
- Ackermann基于1/20汽车底盘
(参考:Ref: https://item.taobao.com/item.htm?spm=a312a.7700824.w4004-15726392027.68.79503c88Rqwzb9&id=554619475840)
总费用:<300 USD)(约2000元人民币)
文献
HyphaROS MPC MiniCar 1日工作坊:
https://drive.google.com/open?id=1yX0aeA4spf_szpxXFpIlH0EQKIgiwJx7
中国ROS暑期学校2018年幻灯片:
https://goo.gl/RpVBDH操作说明
仿真
$ roslaunch hypharos_minicar HyphaROS_Simulation_Stage.launch
默认控制器是mpc,可以通过param切换到pure-pursuit或DWA:“controller”

有线连接
Odroid映像上的默认静态IP为10.0.0.1,因此,要通过电缆连接到Odroid,请将主机IP设置为10.0.0.X
注意:首次启动时,必须通过HDMI更新Odroid MAC地址Dispaly!
无线连接
使用以太网或显示连接使Odroid连接到本地Wifi AP。记得在Odroid和主机上的“.bashrc”文件中设置ROS_MASTER_URI和ROS_IP。
地图构建
-
MiniCar(Odroid)方面:
$ roslaunch hypharos_minicar HyphaROS_MiniCar_Mapping.launch
默认的地图构建算法是gmapping,可以通过param开关到其他slam方法:“slam_type”
(crrently支持:gmapping,karto_slam,mrpt_icp和hector_slam) -
主机(桌面)端:
$ roslaunch hypharos_minicar HyphaROS_Desktop_Mapping.launch
使用键盘控制小车。
完成地图构建后,记得保存两个地图,一个用于amcl,另一个用于move_base!
竞速测试
-
MiniCar(Odroid)方面:
$ roslaunch hypharos_minicar HyphaROS_MiniCar_Racing.launch
默认控制器是mpc,可以通过param切换到其他slam方法:“controller”
(crrently支持:mpc和pure_pursuit) -
主机(桌面)端:
$ roslaunch hypharos_minicar HyphaROS_Desktop_Racing.launch
使用键盘来中断控制器的行为(优先级判定)。

Fin