光流(Optical Flow)
1 相关概念
光流(场):表示空间运动的物体在观察成像平面上的像素运动。
如下图所示,为了从第一个子图转移到第二个子图,
图像中每个像素点的运动如右子图所示。

运动场:物体在真实世界中的运动。
2 如何计算光流(Lucas-Kanade 算法)
2.1 亮度恒常性约束
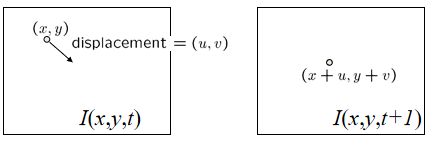
已知连续的两帧图像,如上图所示,求解光流。
为了简化问题,在求解之前假设:
- 亮度恒常性:同一点在每一帧中的投影看起来都是一样的
- 小运动:点不会移动太远
- 空间一致性:点像它们的邻居一样移动
由第一条假设:亮度恒定

等式右边用泰勒公式展开:


所以:
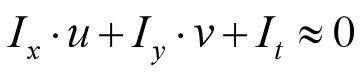

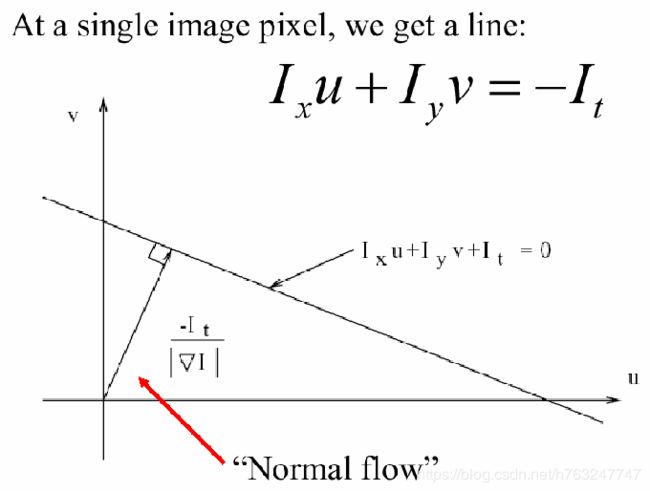
对于一个像素点,只有一个公式,两个未知数(u, v),无法求解。
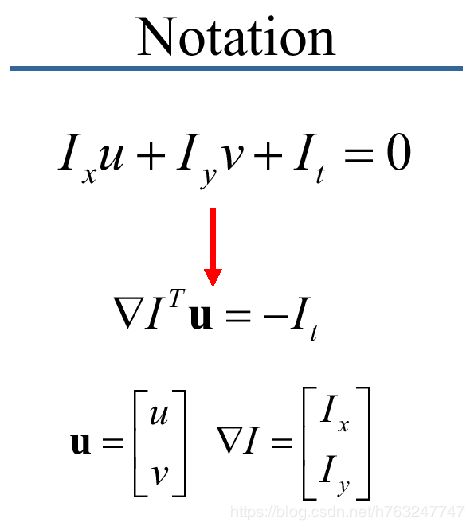
但是从公式可以知道,运动垂直于亮度的梯度
2.2 孔穴问题(aperture problem)

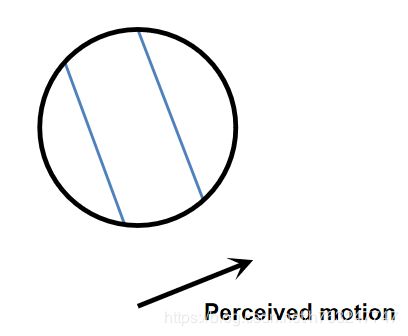
如上图所示,孔穴后面的一条直线沿右下方向移动,通过孔穴观察到的运动为左上方向
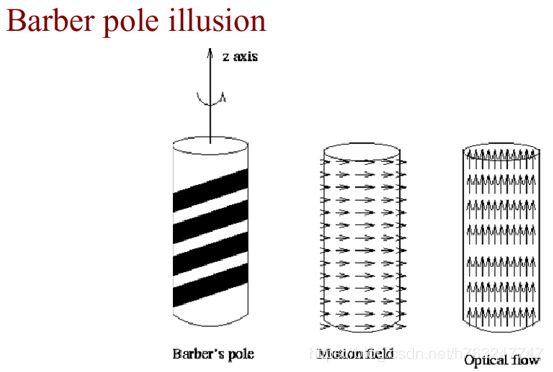
还有 barber pole 错觉,如下图所示:
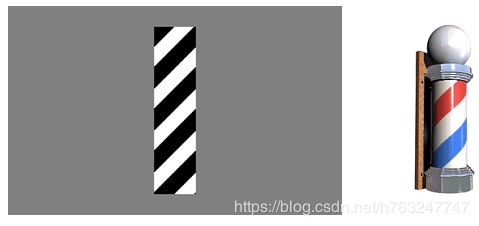
圆柱体旋转,通过孔穴观察到的运动方向为上下
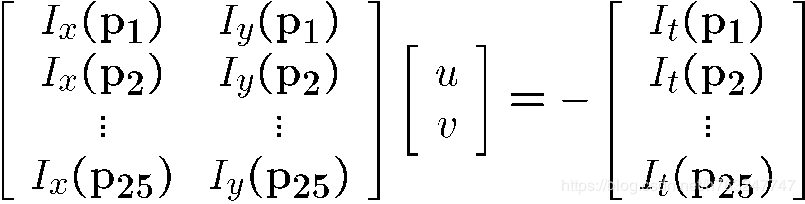
2.3 空间一致性约束(Spatial coherence constraint)
假设该像素点四周的像素点有相同的位移(u,v)
如果选择5*5 的窗口,这样每一个像素点有25个公式:
![]()
用矩阵的形式表示:
简化表示:
两边同时乘以A的转置:

即:
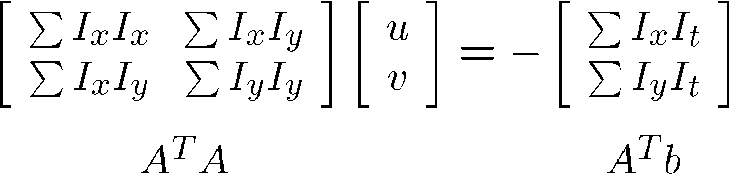
这个公式被称为Lucas-Kanade equation。
上式左边矩阵即是Harris corner detector 的H矩阵,

要想使上式存在解,则:
 可逆
可逆
的特征值不能太小(不能是一个平面,即low texture region)
的特征值不能一个太大,一个太小(不能是一个边,避免孔穴问题)
3 位移大的求解
在第二章,为了简化运算,设置了一个前提条件,运动的位移小。
如果这一条件不满足呢?这里引入LK光流的迭代算法
- 初始化,(x’,y’) = (x,y)
- 计算(u,v)根据Lucas-Kanade公式:

其中:
![]()
- 移动窗口,位移大小为(u,v),即另x’=x’+u; y’=y’+v
- 计算

- 重复上面的过程直到的值很小
此算法有一个问题:容易混淆,如下图所示:
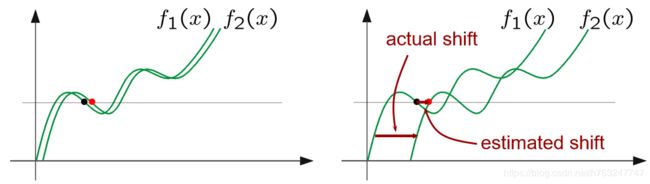
上方右图中,计算的值和实际值不一样。
4 Iterative Lukas-Kanade Algorithm
对于不满足2.1中三个条件,可以使用Iterative Lukas-Kanade Algorithm提高求解精度。
其步骤如下:
- 通过求解Lucas-Kanade方程估计每个像素处的速度(这里假设满足三个条件)
- 使用估计的流场,对I(t-1)进行变换,求变换后的图像与图像I(t)的光流
- 重复以上步骤,直到收敛
5 基于金字塔的LK光流算法
在第二章,为了简化运算,设置了三个前提条件,如果这三个前提条件不再满足,即:
- 亮度恒常性不满足
- 运动的位移不小
- 邻点的运动位移与中心像素点不一样
5.1 思路
当物体的运动速度很快时,两帧之间物体的运动位移很大,为了减小运动的位移,缩小图像的尺寸。
假设图像为400*400,物体的位移为16*16,
当图像缩小为200*200时,物体的位移为8*8,
当图像缩小到100*100时,物体的位移为4*4,
缩小后LK光流法又变得可以使用了。
5.2 具体步骤
4.2.1 对每一张建议一个高斯金字塔,最顶层为最低分辨率图像,最底层为原始图像(分辨率最高)
4.2.2 计算光流
- 最顶层图像的光流估计值为0,即

- 上一层的光流计算结果反馈到下一层,作为该层初始光流值:
![]()
其中 d 可以理解为特征窗口的位移,g 为光流值(物体的像素点的位移)。如下图所示,黑色方块表示邻域窗口,黄色的方框代表物体,在图像金字塔的各层中,邻域窗口的大小是不变的。

如果原图中,邻域窗口的位移为d
则图像金字塔中每层的位移为 ,这里默认每次图像尺寸缩为原来的一半。
,这里默认每次图像尺寸缩为原来的一半。
- 对于每一层
 , 根据上一层求得的该层的初始光流值,先对该层的左边图像进行变换,
, 根据上一层求得的该层的初始光流值,先对该层的左边图像进行变换,
再求取变换后的图像与右边的图像的光流值,这样就满足条件2(运动很小)了。

假设变换后的图像与右边的图像的光流值为:
![]()
这时,领域内所有像素点的匹配误差和记为:

其中,A,B为坐标处的灰度值。
为了使匹配误差和最小,在最优处,导数为0,即:
匹配误差和的导数为:

利用泰勒公式,展开![]() ,这里为什么可以展开?
,这里为什么可以展开?
因为变换后的图像与右边的图像相比,物体的位移(即光流)很小了。

因此,匹配误差和的导数变为:

令:
![]()
代入原公式,可得:


定义:

所以:

因为:
所以:
![]()
所以该层更新的光流值为:![]() 。
。
根据该值,求得下一层的初始光流值。重复 层的过程。
这样一层一层传递下来,就可以求得最后的光流了。
最终原图的光流值就是每一层的光流值的叠加。如下图所示:
