FPGA实现串口与iic控制器总结(2)
在剖析了《深入浅出玩转FPGA》的串口代码和IIC控制器代码、xilinx官方的xilinx的iic控制器(参见书《FPGACPLD设计工具──Xilinx ISE使用详解》)、《片上系统设计思想与源代码分析》一书中带有wishbone接口的iic控制器后,本文尝试对以上做一些总结,并分析不同的iic控制器的实现区别。
上一讲,我们分析了串口代码的实现以及testbench的设计,这一讲,我们开始分析不同的iic控制器的实现并总结。 下一讲将继续另2种带有总线接口和更充分实现iic协议的例子,敬请期待。
2、IIC控制器
2.1 特权的iic控制器
关于IIC的协议就不再赘述了,可以看看网上的一些资料,主要是scl和sda信号线的高低电平的变化的要求和一些约定。实际上的iic是支持共享总线,但是任何时候只能由一个主设备,这样就需要仲裁。但是特权的例子只是模拟了iic的时序接口,做了一个最基本的控制,这点需要明确。他的例程实现的效果是按下键1,iic控制器写入EEPROM芯片AT24CXX,按下键2,读出存储的值并显示在数码管上。
2个文件和一个顶层文件:
module iic_top(
clk,rst_n,
sw1,sw2,
scl,sda,
sm_cs1_n,sm_cs2_n,sm_db //数码管片选
);
input clk; // 50MHz
input rst_n; //复位信号,低有效
input sw1,sw2; //按键1、2,(1按下执行写入操作,2按下执行读操作)
output scl; // 24C02的时钟端口
inout sda; // 24C02的数据端口
output sm_cs1_n,sm_cs2_n; //数码管片选信号,低有效
output[6:0] sm_db; //7段数码管(不包括小数点)
wire[7:0] dis_data; //在数码管上显示的16进制数
iic_com iic_com(
.clk(clk),
.rst_n(rst_n),
.sw1(sw1),
.sw2(sw2),
.scl(scl),
.sda(sda),
.dis_data(dis_data)
);
led_seg7 led_seg7(
.clk(clk),
.rst_n(rst_n),
.dis_data(dis_data),
.sm_cs1_n(sm_cs1_n),
.sm_cs2_n(sm_cs2_n),
.sm_db(sm_db)
);
endmodule 改顶层模块比较好理解。注意,scl这里仅为out型,即只能做主设备。

先看看iic_com实现
输入输出接口:
input clk; // 50MHz
input rst_n; //复位信号,低有效
input sw1,sw2; //按键1、2,(1按下执行写入操作,2按下执行读操作)
output scl; // 24C02的时钟端口,很明显只是作为主机,并不能接收时钟
inout sda; // 24C02的数据端口
output[7:0] dis_data; //数码管显示的数据按键检测:
//--------------------------------------------
//按键检测
reg sw1_r,sw2_r; //键值锁存寄存器,每20ms检测一次键值
reg[19:0] cnt_20ms; //20ms计数寄存器
//这个的习惯是,计数与判断分成2个always来写
always @ (posedge clk or negedge rst_n)
if(!rst_n) cnt_20ms <= 20'd0;
else cnt_20ms <= cnt_20ms+1'b1; //不断计数
always @ (posedge clk or negedge rst_n)
if(!rst_n) begin
sw1_r <= 1'b1; //键值寄存器复位,没有键盘按下时键值都为1
sw2_r <= 1'b1;
end
else if(cnt_20ms == 20'hfffff) begin //50mhz,这个时间为10的6次方乘以20ns即为20ms
sw1_r <= sw1; //按键1值锁存
sw2_r <= sw2; //按键2值锁存
end
//这个按键锁存并不到位,并没有与的操作iic支持的传输速度有多种,此处设置为100k,下面即是对时钟分频的处理,需在产生这么时钟,并区分出上升沿,下降沿等。
//---------------------------------------------
//分频部分
reg[2:0] cnt; // cnt=0:scl上升沿,cnt=1:scl高电平中间,cnt=2:scl下降沿,cnt=3:scl低电平中间
reg[8:0] cnt_delay; //500循环计数,产生iic所需要的时钟
reg scl_r; //时钟脉冲寄存器
always @ (posedge clk or negedge rst_n)
if(!rst_n) cnt_delay <= 9'd0;
else if(cnt_delay == 9'd499) cnt_delay <= 9'd0; //计数到10us为scl的周期,即100KHz,50MHZ
else cnt_delay <= cnt_delay+1'b1; //时钟计数
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) cnt <= 3'd5;
else begin
case (cnt_delay) //将一个50%的时钟clk划分为4个时间点,画图可知
9'd124: cnt <= 3'd1; //cnt=1:scl高电平中间,用于数据采样
9'd249: cnt <= 3'd2; //cnt=2:scl下降沿
9'd374: cnt <= 3'd3; //cnt=3:scl低电平中间,用于数据变化
9'd499: cnt <= 3'd0; //cnt=0:scl上升沿
default: cnt <= 3'd5;
endcase
end
end
`define SCL_POS (cnt==3'd0) //cnt=0:scl上升沿
`define SCL_HIG (cnt==3'd1) //cnt=1:scl高电平中间,用于数据采样
`define SCL_NEG (cnt==3'd2) //cnt=2:scl下降沿
`define SCL_LOW (cnt==3'd3) //cnt=3:scl低电平中间,用于数据变化
always @ (posedge clk or negedge rst_n)
if(!rst_n) scl_r <= 1'b0;
else if(cnt==3'd0) scl_r <= 1'b1; //scl信号上升沿
else if(cnt==3'd2) scl_r <= 1'b0; //scl信号下降沿
assign scl = scl_r; //产生iic所需要的时钟
//---------------------------------------------
//需要写入24C02的地址和数据
`define DEVICE_READ 8'b1010_0001 //被寻址器件地址(读操作)
`define DEVICE_WRITE 8'b1010_0000 //被寻址器件地址(写操作)
`define WRITE_DATA 8'b0001_0001 //写入EEPROM的数据
`define BYTE_ADDR 8'b0000_0011 //写入/读出EEPROM的地址寄存器
reg[7:0] db_r; //在IIC上传送的数据寄存器
reg[7:0] read_data; //读出EEPROM的数据寄存器
这里是对开发板上的at24c02的实际情况的设定,根据该芯片手册,读写的地址如上。
接下来就是状态机了:
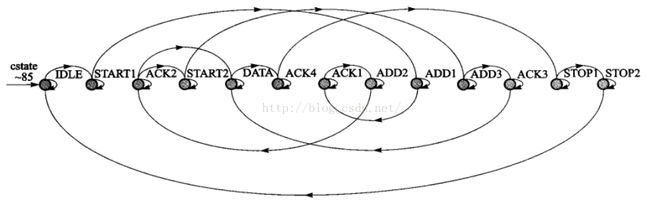
//---------------------------------------------
//读、写时序
parameter IDLE = 4'd0;
parameter START1 = 4'd1; //scl为高电平时的sda表示启动
parameter ADD1 = 4'd2; //add1表示的写地址位,会延续8个
parameter ACK1 = 4'd3; //等待应答
parameter ADD2 = 4'd4;
parameter ACK2 = 4'd5;
parameter START2 = 4'd6;
parameter ADD3 = 4'd7;
parameter ACK3 = 4'd8;
parameter DATA = 4'd9;
parameter ACK4 = 4'd10;
parameter STOP1 = 4'd11;
parameter STOP2 = 4'd12;
reg[3:0] cstate; //状态寄存器
reg sda_r; //输出数据指示寄存器
reg sda_link; //输出数据sda信号inout方向控制位,1表示从发数据到ee中
reg[3:0] num; //计数8位
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
cstate <= IDLE;
sda_r <= 1'b1;
sda_link <= 1'b0;
num <= 4'd0;
read_data <= 8'b0000_0000;
end
else
case (cstate)
IDLE: begin
sda_link <= 1'b1; //数据线sda为output
sda_r <= 1'b1;
if(!sw1_r || !sw2_r) begin //SW1,SW2键有一个被按下
db_r <= `DEVICE_WRITE; //送器件地址(写操作)
cstate <= START1;
end
else cstate <= IDLE; //没有任何键被按下
end
START1: begin
if(`SCL_HIG) begin //scl为高电平期间
sda_link <= 1'b1; //数据线sda为output
sda_r <= 1'b0; //拉低数据线sda,产生起始位信号,364行assign输出该信号
cstate <= ADD1;
num <= 4'd0; //num计数清零
end
else cstate <= START1; //等待scl高电平中间位置到来
end
ADD1: begin
if(`SCL_LOW) begin //scl为低电平期间才可以变化数据
if(num == 4'd8) begin //发完8个,不再发了,准备接收应答
num <= 4'd0; //num计数清零
sda_r <= 1'b1;
sda_link <= 1'b0; //sda置为高阻态(input)
cstate <= ACK1;
end
else begin
cstate <= ADD1;
num <= num+1'b1;
case (num)
4'd0: sda_r <= db_r[7]; //高位在前
4'd1: sda_r <= db_r[6];
4'd2: sda_r <= db_r[5];
4'd3: sda_r <= db_r[4];
4'd4: sda_r <= db_r[3];
4'd5: sda_r <= db_r[2];
4'd6: sda_r <= db_r[1];
4'd7: sda_r <= db_r[0];
default: ;
endcase
// sda_r <= db_r[4'd7-num]; //送器件地址,从高位开始
end
end
// else if(`SCL_POS) db_r <= {db_r[6:0],1'b0}; //器件地址左移1bit
else cstate <= ADD1;
end
ACK1: begin
if(/*!sda*/`SCL_NEG) begin //注:24C01/02/04/08/16器件可以不考虑应答位,下降沿表示应答
cstate <= ADD2; //从机响应信号
db_r <= `BYTE_ADDR; // 要写或读的地址
end
else cstate <= ACK1; //等待从机响应 //一直等,没有冗余机制
end
ADD2: begin
if(`SCL_LOW) begin //下降沿开始数据变化,发送地址
if(num==4'd8) begin
num <= 4'd0; //num计数清零
sda_r <= 1'b1;
sda_link <= 1'b0; //sda置为高阻态(input)
cstate <= ACK2;
end
else begin
sda_link <= 1'b1; //sda作为output
num <= num+1'b1;
case (num)
4'd0: sda_r <= db_r[7];
4'd1: sda_r <= db_r[6];
4'd2: sda_r <= db_r[5];
4'd3: sda_r <= db_r[4];
4'd4: sda_r <= db_r[3];
4'd5: sda_r <= db_r[2];
4'd6: sda_r <= db_r[1];
4'd7: sda_r <= db_r[0];
default: ;
endcase
// sda_r <= db_r[4'd7-num]; //送EEPROM地址(高bit开始)
cstate <= ADD2;
end
end
// else if(`SCL_POS) db_r <= {db_r[6:0],1'b0}; //器件地址左移1bit
else cstate <= ADD2;
end
ACK2: begin
if(/*!sda*/`SCL_NEG) begin //从机响应信号
if(!sw1_r) begin //这个建是写
cstate <= DATA; //写操作,进入data状态
db_r <= `WRITE_DATA; //写入的数据
end
else if(!sw2_r) begin //读
db_r <= `DEVICE_READ; //送器件地址(读操作),特定地址读需要执行该步骤以下操作
cstate <= START2; //读操作
end
end
else cstate <= ACK2; //等待从机响应,一直等着,知道案件按下
end
START2: begin //读操作起始位
if(`SCL_LOW) begin //为低的时候等高电平
sda_link <= 1'b1; //sda作为output
sda_r <= 1'b1; //拉高数据线sda
cstate <= START2;
end
else if(`SCL_HIG) begin //scl为高电平中间
sda_r <= 1'b0; //拉低数据线sda,产生起始位信号
cstate <= ADD3;
end
else cstate <= START2;
end
ADD3: begin //送读操作地址
if(`SCL_LOW) begin
if(num==4'd8) begin
num <= 4'd0; //num计数清零
sda_r <= 1'b1;
sda_link <= 1'b0; //sda置为高阻态(input)
cstate <= ACK3;
end
else begin
num <= num+1'b1;
case (num)
4'd0: sda_r <= db_r[7]; //读器件地址
4'd1: sda_r <= db_r[6];
4'd2: sda_r <= db_r[5];
4'd3: sda_r <= db_r[4];
4'd4: sda_r <= db_r[3];
4'd5: sda_r <= db_r[2];
4'd6: sda_r <= db_r[1];
4'd7: sda_r <= db_r[0];
default: ;
endcase
// sda_r <= db_r[4'd7-num]; //送EEPROM地址(高bit开始)
cstate <= ADD3; //等到满足送出8位再来
end
end
// else if(`SCL_POS) db_r <= {db_r[6:0],1'b0}; //器件地址左移1bit
else cstate <= ADD3;
end
ACK3: begin //拉低表示应答,其实应该是从机拉低表示应答,这里全部是主机自己根据时间来掐时间认为正确
if(/*!sda*/`SCL_NEG) begin
cstate <= DATA; //从机响应信号
sda_link <= 1'b0; //数据线为z,表示准备接受数据
end
else cstate <= ACK3; //等待从机响应
end
DATA: begin
if(!sw2_r) begin //读操作
if(num<=4'd7) begin
cstate <= DATA;
if(`SCL_HIG) begin
num <= num+1'b1;
case (num)
4'd0: read_data[7] <= sda; //先接受高位,eeprom中读出的数据
4'd1: read_data[6] <= sda;
4'd2: read_data[5] <= sda;
4'd3: read_data[4] <= sda;
4'd4: read_data[3] <= sda;
4'd5: read_data[2] <= sda;
4'd6: read_data[1] <= sda;
4'd7: read_data[0] <= sda;
default: ;
endcase
// read_data[4'd7-num] <= sda; //读数据(高bit开始)
end
// else if(`SCL_NEG) read_data <= {read_data[6:0],read_data[7]}; //数据循环右移
end
else if((`SCL_LOW) && (num==4'd8)) begin
num <= 4'd0; //num计数清零
cstate <= ACK4;
end
else cstate <= DATA;
end
else if(!sw1_r) begin //写操作
sda_link <= 1'b1;
if(num<=4'd7) begin
cstate <= DATA;
if(`SCL_LOW) begin
sda_link <= 1'b1; //数据线sda作为output
num <= num+1'b1;
case (num)
4'd0: sda_r <= db_r[7];
4'd1: sda_r <= db_r[6];
4'd2: sda_r <= db_r[5];
4'd3: sda_r <= db_r[4];
4'd4: sda_r <= db_r[3];
4'd5: sda_r <= db_r[2];
4'd6: sda_r <= db_r[1];
4'd7: sda_r <= db_r[0];
default: ;
endcase
// sda_r <= db_r[4'd7-num]; //写入数据(高bit开始)
end
// else if(`SCL_POS) db_r <= {db_r[6:0],1'b0}; //写入数据左移1bit
end
else if((`SCL_LOW) && (num==4'd8)) begin
num <= 4'd0;
sda_r <= 1'b1;
sda_link <= 1'b0; //sda置为高阻态
cstate <= ACK4;
end
else cstate <= DATA;
end
end
ACK4: begin
if(/*!sda*/`SCL_NEG) begin
// sda_r <= 1'b1;
cstate <= STOP1;
end
else cstate <= ACK4;
end
STOP1: begin
if(`SCL_LOW) begin
sda_link <= 1'b1;
sda_r <= 1'b0;
cstate <= STOP1;
end
else if(`SCL_HIG) begin
sda_r <= 1'b1; //scl为高时,sda产生上升沿(结束信号)
cstate <= STOP2;
end
else cstate <= STOP1;
end
STOP2: begin
if(`SCL_LOW) sda_r <= 1'b1;
else if(cnt_20ms==20'hffff0) cstate <= IDLE; //防止死循环,又跳到了idle状态
else cstate <= STOP2;
end
default: cstate <= IDLE;
endcase
endassign sda = sda_link ? sda_r:1'bz; //准备接收数据时为z状态,表示悬空的三态
assign dis_data = read_data; //eeprom中读出的数据给输出给数码管显示
所以整个的思路还是很清晰的,但是并没有接受实践的从机的应答,也没有冗余机制,通信失败了怎么办,而是主机一直在哪个地方等,可能会卡死,所以这个仅仅算一个iic时序模拟器吧,有点这种感觉。
最后数据传给dis_data到数码管显示。
简单说下数码管显示:
module led_seg7(
clk,rst_n,
dis_data,
sm_cs1_n,sm_cs2_n,sm_db
);
input clk; // 50MHz
input rst_n; // 复位信号,低有效
input[7:0] dis_data; //显示数据
output sm_cs1_n,sm_cs2_n; //数码管片选信号,低有效
output[6:0] sm_db; //7段数码管(不包括小数点)
reg[7:0] cnt;
always @ (posedge clk or negedge rst_n)
if(!rst_n) cnt <= 8'd0;
else cnt <= cnt+1'b1;
//-------------------------------------------------------------------------------
/* 共阴极 :不带小数点
;0, 1, 2, 3, 4, 5, 6, 7,
db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h
;8, 9, a, b, c, d, e, f , 灭
db 7fh,6fh,77h,7ch,39h,5eh,79h,71h,00h */parameter seg0 = 7'h3f,
seg1 = 7'h06,
seg2 = 7'h5b,
seg3 = 7'h4f,
seg4 = 7'h66,
seg5 = 7'h6d,
seg6 = 7'h7d,
seg7 = 7'h07,
seg8 = 7'h7f,
seg9 = 7'h6f,
sega = 7'h77,
segb = 7'h7c,
segc = 7'h39,
segd = 7'h5e,
sege = 7'h79,
segf = 7'h71;
reg[6:0] sm_dbr; //7段数码管(不包括小数点)
wire[3:0] num; //显示数据
assign num = cnt[7] ? dis_data[7:4] : dis_data[3:0]; //用2个数码管,每个数码管为4位
assign sm_cs1_n = cnt[7]; //数码管1常开 //一下只显示一个数码管,开一个就关另一个,50%到50%的显示比例
assign sm_cs2_n = ~cnt[7]; //数码管2常开
always @ (posedge clk)
case (num) //NUM值显示在两个数码管上
4'h0: sm_dbr <= seg0;
4'h1: sm_dbr <= seg1;
4'h2: sm_dbr <= seg2;
4'h3: sm_dbr <= seg3;
4'h4: sm_dbr <= seg4;
4'h5: sm_dbr <= seg5;
4'h6: sm_dbr <= seg6;
4'h7: sm_dbr <= seg7;
4'h8: sm_dbr <= seg8;
4'h9: sm_dbr <= seg9;
4'ha: sm_dbr <= sega;
4'hb: sm_dbr <= segb;
4'hc: sm_dbr <= segc;
4'hd: sm_dbr <= segd;
4'he: sm_dbr <= sege;
4'hf: sm_dbr <= segf;
default: ;
endcase
assign sm_db = sm_dbr;
endmodulecnt溢出计数,仅根据最高位是0还是1来实现究竟显示哪个数码管,所以是50%的显示,扫描的时间也可根据cnt与时钟频率来算。比较简单。
总的来说,思路还是比较清晰的,这是一个状态机的例子,与上一讲的串口的实现方式不一样,一个是状态跳转,一个是多个always块中的信号传递来实现控制。这里面也有作者的很多个人的习惯,比如cnt‘的always作者习惯分成2部分来写等等。
但是这只是一个非常粗陋的iic控制器,不接受从机的应答,相对于完整的iic协议来说,非常不完整,并且移植性也不好。我们在学单片机时,知道有的单片机有iic,我们只需在写51代码时,操纵寄存器即可,那么那个部件是怎么实现,显然跟我们这里讲的这种方式是不一样的。
下一讲就来讲讲xilinx官方的一个完整的iic的控制器和or1200中带有wishbone总线接口的iic控制器的实现,相比于这种方式完整得多。