基于AT89C51单片机的超声波传感器测距
目录
基于超声波测距传感器的汽车倒车报警器
问题咨询及项目源码请加群:
QQ群:
名称:IT项目交流群
群号:245022761
一、项目目的
1. 了解超声波测距传感器工作原理及引脚功能。
2. 学会使用超声波测距传感器测量距离。
3. 会使用1602液晶显示器显示测量距离。
4. 学会控制LED灯亮灭。
5. 学会使用蜂鸣器发出报警声
二、项目要求
为避免汽车倒车时与后方障碍物发生碰撞,请设计一款基于超声波测距传感器的汽车倒车报警器,要求如下:
①在显示屏上随时显示汽车与车后物体间的距离。
②一旦进入危险距离(<=1m)范围内,蜂鸣器将发出“嘀。。。嘀。。。”声音,LED灯开始闪烁,提示驾驶员;当距离越来越近是,提示声音越急促,LED灯闪烁越快(亮灭间隔越短)。
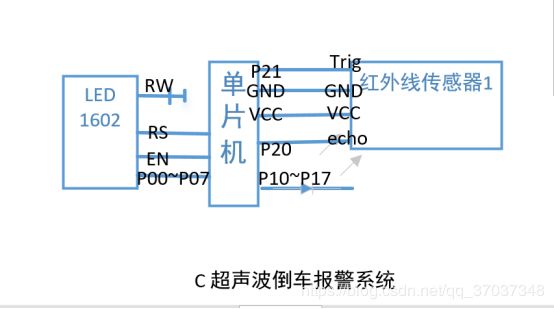
三、系统连接图:
四、代码实现
1602液晶显示代码:
#include <1602.h>
sbit LCDEN=P3^4;
sbit RS=P3^5;
//RW直接接地,只允许写不允许读
sbit BF=P0^7;
//u8 DectectBusyBit(void)//状态判断函数(忙/闲?)
//{
// bit result;
// P0 = 0xff; //读状态前先置高电平,防止误判
// RS = 0;
// delay_ms(5);
// RW = 1;
// LCDEN = 1;
// delay_ms(5);
// result=BF; //若LCM忙,则反复测试,在此处原地踏步;当LCM闲时,才往下继续
// LCDEN = 0;
// return result;
//}
//u8 RdACAdr(void)//读当前光标地址
//{
// u8 result;
// P0 = 0xff; //读地址前先置高电平,防止误判
// RS = 0;
// delay_ms(5);
// RW = 1;
// LCDEN = 1;
// delay_ms(5);
// result=P0&0x7f; //去掉最高位忙闲标记,只保留低7位地址值
// LCDEN = 0;
// return result;
//}
void WrComLCD(u8 ComVal)//写命令函数
{
// while(DectectBusyBit()==1); //先检测LCM是否空闲
RS = 0;
delay_ms(1);
// RW = 0;
LCDEN = 1;
P0 = ComVal;
delay_ms(1);
LCDEN = 0;
}
void WrDatLCD(u8 DatVal)//写数据函数
{
// while(DectectBusyBit()==1);
RS = 1;
delay_ms(1);
// RW = 0;
LCDEN = 1;
P0 = DatVal;
delay_ms(1);
LCDEN = 0;
}
void LCD1602_Init(void)//1602初始化函数
{
WrComLCD(0x38); // 功能设定:16*2行、5*7点阵、8位数据接口
WrComLCD(0x38);
WrComLCD(0x38);
//多次重复设定功能指令,因为LCD启动后并不知道使用的是4位数据接口还是8位的,所以开始时总是默认为4位,这样刚开始写入功能设定指令时,低4位被忽略,为了可靠,最好多写几遍该指令
WrComLCD(0x01); // 清屏
WrComLCD(0x06); // 光标自增、屏幕不动
delay_ms(1); // 延时,等待上面的指令生效,下面再显示,防止出现乱码
WrComLCD(0x0C); // 开显示、关光标
delay_ms(5);
}
void LCD1602pos(u8 x,u8 y)//1602显示坐标定位函数:x为行标,0:第一行,1:第二行;y为列标,0-15
{
u8 t;
t=x?0x40:0x00;
WrComLCD(0x80+t+y);
}
void LCD1602_disstr(u8 *p,u8 x,u8 y)//从指定坐标开始显示英文字符串(长度不超过32)
{
u8 i=0,t;
LCD1602pos(x,y);
while(p[i]!='\0')
{
WrDatLCD(p[i]);
i++;
delay_ms(5);
// t=RdACAdr();
// if(t==0x10) LCD1602pos(1,0);//读当前坐标,如果第1行写完换行到第2行
// if(t==0x50) LCD1602pos(0,0);//读当前坐标,如果第2行写完换行到第1行
if(y+i==16) {x=x^0x01;LCD1602pos(x,0);}//x=x^0x01;//如果第1行写完换行到第2行,如果第2行写完换行到第1行
}
}
void LCD1602_disch(u8 ch,u8 x,u8 y)//显示一个英文字符
{
LCD1602pos(x,y);
WrDatLCD(ch);
delay_ms(5);
}
void LCD1602_clear(void)//1602清屏函数
{
WrComLCD(0x01); // 清屏
}
void LCD1602_backspace(void)//向左删除一个字符
{
WrComLCD(0x10);//光标左移
WrDatLCD(' ');//输出空格
WrComLCD(0x10);//光标左移
}超声波 Supersonic代码实现:
#include
#define VELOCITY_30C 3495 //30摄氏度时的声速,声速V= 331.5 + 0.6*温度;速度扩大了10倍,
#define VELOCITY_23C 3453 //23摄氏度时的声速,声速V= 331.5 + 0.6*温度;速度扩大了10倍,
sbit ECHO = P2^0; //回声接收端口
sbit TRIG = P2^1; //超声触发端口
u8 count;
void Init_Timer0(void)//定时器0初始化
{
TMOD = TMOD|0x01; //定时器0初始化,设置为:工作方式1(16位计数值)
TL0 = 0x66;
TH0 = 0xfc; //定时1ms
EA = 1; //总中断使能
ET0 = 1; //开定时器0
}
void Init_Supersonic()//超声波传感器初始化
{
TRIG =0;
ECHO = 0;
count = 0;
Init_Timer0();
}
void Trig_SuperSonic()//发出声波
{
TRIG = 1;
delay_us(1); //延时10微秒;
TRIG = 0;
}
u32 Measure_Distance()//计算距离函数,返回为距离值,单位mm
{
u32 distance=0; //距离变量
u8 l;
u16 h,y;
while(ECHO == 0); //等待回声
TR0 = 1;
while(ECHO);
TR0 = 0;
l = TL0;
h = TH0;
y = (h << 8) + l;//将计数值转换为16位
y = y - 0xfc66;//us部分,不足1ms的时间
distance = y + 1000 * count;
count = 0;
//计算总时间(单位us)=若干(count)ms+us(y)
TL0 = 0x66;
TH0 = 0xfc;
delay_us(30);
distance = VELOCITY_30C * distance / 20000;//距离单位换算成MM
return distance;
}
void timer0 () interrupt 1//T0中断处理函数
{
TL0 = 0x66;
TH0 = 0xfc;
count++;
if(count == 18)//超声波回声脉宽最多18ms
{
TR0 =0;
TL0 = 0x66;
TH0 = 0xfc;
count = 0;
}
} //输出到串口代码实现
Uart代码部分:
#include
void Init_COM(void) //串口初始化 9600
{
TMOD = TMOD|0x20;
PCON = 0x00;
SCON = 0x50;
TH1 = 0xFd;
TL1 = 0xFd;
TR1 = 1;
}
void Print_str_COM(u8 *str)//输出字符串到串口
{
TI=1;
printf("%s\n",str);
while(!TI);
TI=0;
} Main函数代码实现:
#include
#include
#include
#include <1602.h>
u8 print[20];//缓冲区
u8 *p={"Distance:"};
sbit beep=P2^3; //蜂鸣器引脚
void delay_ms(u16 x)//毫秒延时函数
{u16 i;
u8 j;
for(i=0;i 四、效果实现
实验现象:当程序下载到实验板上后,打开实验板,测试距离在试验所选超声波所能检测范围之内,基本实现了实验要求的现象:
①在显示屏上随时显示汽车与车后物体间的距离。
②一旦进入危险距离(<=1m)范围内,蜂鸣器将发出“嘀。。。嘀。。。”声音,LED灯开始闪烁,提示驾驶员;当距离越来越近是,提示声音越急促,LED灯闪烁越快(亮灭间隔越短)
本设计存在不足还请各位码友多多指教,旨在互相交流,共同进步,还请多多关注。
附上本人在大学学习期间所有学习实现的demo,这些项目的实现都通过本人亲自测试运行,也是自己学习中知识的一点一点积累,整理不易,希望能帮到大家,不足之处大家多多交流。
项目源码请加群下载:
QQ群:
名称:IT项目交流群
群号:245022761
世界不同角落共同努力,变成更优秀的我们。
1.51单片机学习整理
基于51单片机的智能光控路灯 :https://download.csdn.net/download/qq_37037348/11071869
基于51单片机超声波测距(内含源程序,原理图及PCB源文件):https://download.csdn.net/download/qq_37037348/11071866
基于51单片机的智能安防报警系统:https://download.csdn.net/download/qq_37037348/11071865
基于51单片机模块化编程模块 (红外、液晶显示屏、温湿度等传感器模块化)
:https://download.csdn.net/download/qq_37037348/11053222
基于51单片机pwm控制的呼吸灯程序
https://download.csdn.net/download/qq_37037348/11053195
51单片机与上位机串口通信实例包含详细讲解的完整代码
https://download.csdn.net/download/qq_37037348/11053164
基于51单片机的直交流电压表仿真 (详细代码实现,设计讲解)
https://download.csdn.net/download/qq_37037348/11053145
基于51单片机胸牌 详细代码实现,设计讲解)
https://download.csdn.net/download/qq_37037348/11053125
基于51单片机3x4按键拨号 (详细代码实现,设计讲解)
https://download.csdn.net/download/qq_37037348/11053093
基于51单片机拨号 (详细代码实现,设计讲解)
https://download.csdn.net/download/qq_37037348/11053090
基于51单片机警灯系统设计(详细代码实现,设计讲解)
https://download.csdn.net/download/qq_37037348/11053086
基于51单片机点亮一个小灯(详细代码实现,设计讲解,学习51基础实验)
https://download.csdn.net/download/qq_37037348/11053084
基于51单片机开发的排球计时器,附有详细注释讲解,为大家提供最真心的帮助
https://download.csdn.net/download/qq_37037348/11053024
基于51单片机的音乐播放器,源码详细注释
https://download.csdn.net/download/qq_37037348/11053022
2.Android 开发学习整理:
Android-serialport 手机App串口通信代码实现:
https://download.csdn.net/download/qq_37037348/11050521
Android-serialport 手机App网络通信实例代码实现:
https://download.csdn.net/download/qq_37037348/11050516
Android 第一个App详细教程、基础实验 :
https://download.csdn.net/download/qq_37037348/11050515
3.计算机视觉(深度学习、神经网络的学习)
feature extraction(深度学习,特征提取,神经网络:https://download.csdn.net/download/qq_37037348/11065968
feature extraction(深度学习,特征提取,神经网络多种训练模型详细实现):
https://download.csdn.net/download/qq_37037348/11065974
欢迎大家加入学习项目交流,为大家分享各类个人学习项目及学习资料,互相交流互相学习。
问题咨询及项目源码请加群:
QQ群:
名称:IT项目交流群
群号:245022761