IntelRealSense D435i
Resources
- Get started
- IntelRealSense/librealsense-Github
- Intel® RealSense™ SDK 2.0 Github User Guide
Preparation
- Ubuntu 16.04
Ubuntu 16.04/18.04 LTS (Linux Kernels 4.4, 4.8 ,4.10, 4.13, 4.15 and 4.16)
Linux yubao-Z370M-S01 4.15.0-46-generic #49~16.04.1-Ubuntu SMP Tue Feb 12 17:45:24 UTC 2019 x86_64 x86_64 x86_64 GNU/Linux
- ROS Kinetic
- Intel® RealSense™ SDK 2.0 (build 2.19.0) Download
- Intel® RealSense™ Depth Cameras D435i
- ROS Wrapper 2.0 for Intel® RealSense™ Devices (build 2.2.1) Download
Important notes:
- Don’t use the Using pre-build packages, try to build with source code. I don’t know why
- Make sure the SDK’s version is compatible with ROS Wrapper’s version
Building librealsense2 SDK
Refer Linux Ubuntu Installation
Error when execute ./scripts/patch-realsense-ubuntu-lts.sh
Error Description:
make: Leaving directory '/home/yubao/GitProject/librealsense-2.19.0/ubuntu-xenial-hwe'
Patched kernels modules were created successfully
Replacing videodev :
Module videodev is used by videobuf2_core
Unloading dependency videobuf2_core
modprobe: FATAL: Module videobuf2_core is in use.
Failed to unload module videobuf2_core. error type 1 . Operation is aborted
yubao@yubao-Z370M-S01:~/GitProject/librealsense-2.19.0$
Solution:
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
videobuf2_core 40960 2 videobuf2_v4l2,uvcvideo
videodev 180224 3 videobuf2_core,videobuf2_v4l2,uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ sudo modprobe -r uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
build and installation
mkdir build && cd build
cmake ../ -DBUILD_EXAMPLES=true -DCMAKE_BUILD_TYPE=Release
make && sudo make install
Recompile and install librealsense binaries
sudo make uninstall && make clean && make && sudo make install
Remove all RealSense™ SDK-related packages with:
dpkg -l | grep "realsense" | cut -d " " -f 3 | xargs sudo dpkg --purge
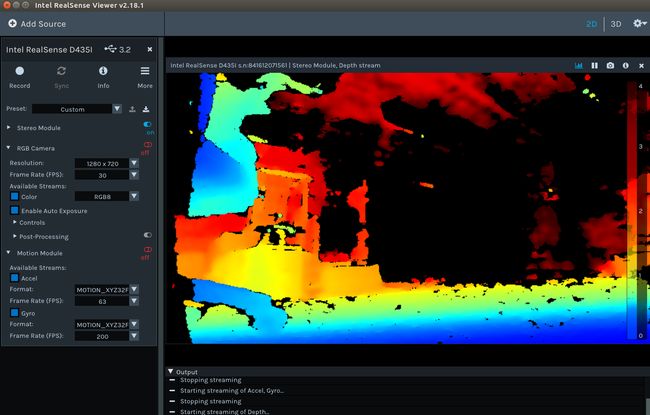
realsense-viewer
Reconnect the Intel RealSense depth camera and run:
realsense-viewer
to verify the installation.
If not working, reboot your PC and try again.
ROS: RGBD Poind Cloud
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
ROS: Start the camera node
roslaunch realsense2_camera rs_camera.launch

SLAM with D435i
wiki
OpenNI2 Interface
refer
cd build
cmake-gui ..
![]()
make
cp _out/librs2driver.so ~/GitProject/OpenNI2/Bin/x64-Release/OpenNI2/Drivers/
cp librealsense2.so ~/GitProject/OpenNI2/Bin/x64-Release/OpenNI2/Drivers/
./SimpleViewer
./NiViewer
