RT-Thread Nano是RT-Thread的精简版,只有内核、shell(msh)、设备驱动三大功能,以Keil5的pack形式发布。RT-Thread Nano在保证了具备完整功能的RTOS实时内核的前提下实现了极小的FLASH和RAM占用,默认配置下,FLASH可小至2.5KB, RAM可以小至1KB,对于当今主流32位MCU/SoC来说,跑起来毫无压力。
下面就跟随小编一起,看看如何在机智云gokit智能硬件开发板上将RT-Thread Nano跑起来吧~
一、RT-Thread Nano Pack安装
1. 使用STM32CubeMX创建一个可以点亮板载LED的基本工程,参考:http://club.gizwits.com/thread-3859-1-1.html
2. 在MDK5主界面上点击“Pack Install”按钮,进入Pack Install界面: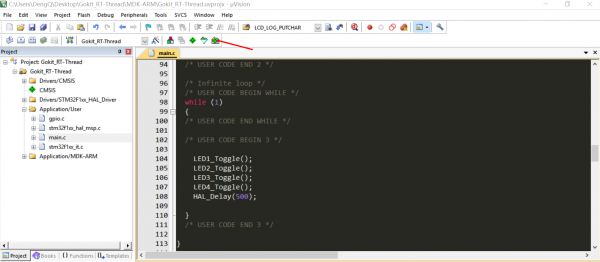
3. 在Pack Install界面下,RT-Thread Pack在右边栏中。点击“Install”可下载,点击“Update”可更新。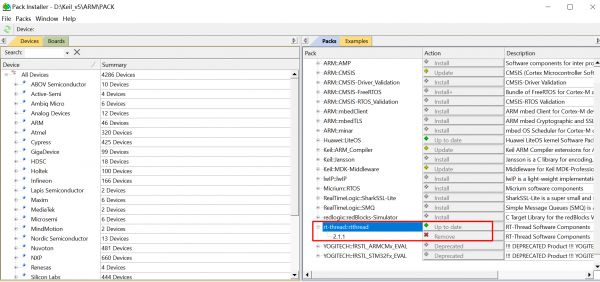
4. 如果在上图界面“Packs”栏中未发现“RT-Thread”,通过两种方法获取RT-Thread Pack。
第一种方法是直接从http://www.rt-thread.org/downloa ... rtthread.2.1.1.pack下载2.1.1版本的的RT-Thread Pack,然后双击完成安装。
第二种方法是在菜单“Packs”下点击“Check for Updates”,Update完成后,将可看到RT-Thread Pack,然后下载Pack再安装它。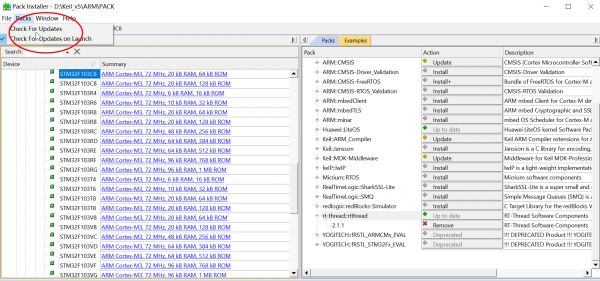
二、kernel加载与应用
1. 在主界面点击“ManageRun-TimeEnvironment”进入加载页:
在“RTOS”一栏中选中“RT-Thread”,并在列表中选中“kernel”: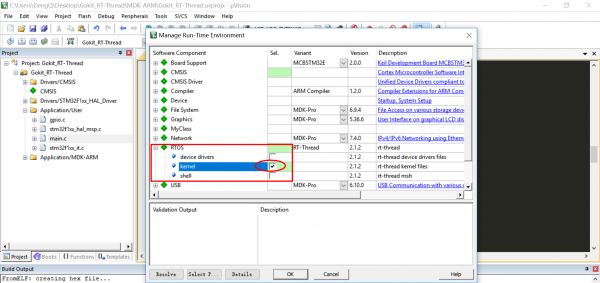
2. 确定后,RT-Thread的kernel文件会被自动添加进来: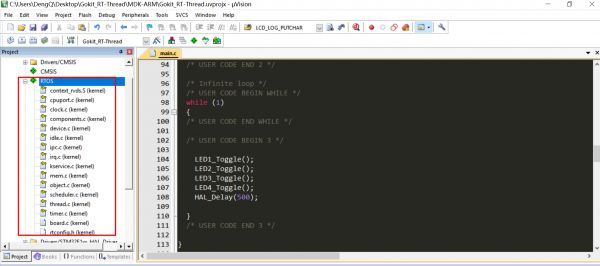
Kernel文件包括:
clock.c
components.c
device.c
idle.c
ipc.c
irq.c
kservice.c
mem.c
object.c
scheduler.c
thread.c
timer.c
Cortex-M芯片内核移植代码:
cpuport.c
context_rvds.s
应用代码及配置文件:
board.c
rtconfig.h
三、修改源码适配机智云Gokit
1.需要做一些微小的修改才能在Gokit上跑起来:
1)修改Application/User分组下的stm32f1xx_it.c文件,删除如下3个函数:
void HardFault_Handler(void);
void PendSV_Handler(void);
void SysTick_Handler(void);
2)修改RTOS分组下的board.c上文件:
修改第24行为:
- #include "stm32f1xx_hal.h"
修改第66行:取消注释,并加入2行代码如下。
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_IncTick();
HAL_SYSTICK_IRQHandler();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
3)在rtconfig.h使能动态内存管理: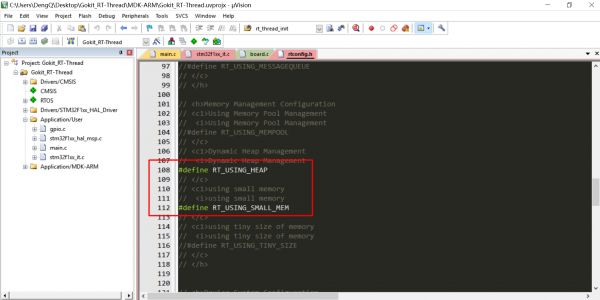
此外,第15行,修改RT_TICK_PER_SECOND为1000。
2. 修改main.c文件,屏蔽掉while(1)死循环,加入测试代码: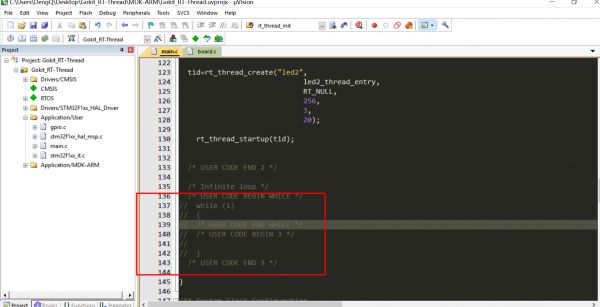
/**
****************************************************
* File Name : main.c
* Description : Main program body
****************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2017 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
****************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "rtthread.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
//线程LED1
static void led1_thread_entry(void* parameter)
{
while(1)
{
LED1_Toggle();
rt_thread_delay(500); //延时
}
}
//线程LED2
static void led2_thread_entry(void* parameter)
{
while(1)
{
LED2_Toggle();
rt_thread_delay(100); //延时
}
}
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
rt_thread_t tid1=RT_NULL;//线程句柄
rt_thread_t tid2=RT_NULL;//线程句柄
//创建动态线程
tid1=rt_thread_create("led1",//线程名字
led1_thread_entry,//线程入口函数
RT_NULL,//线程参数
256,//线程栈大小
3,//线程优先级
20);//线程时间片
//启动线程
rt_thread_startup(tid1);
//创建动态线程
tid2=rt_thread_create("led2",//线程名字
led2_thread_entry,//线程入口函数
RT_NULL,//线程参数
256,//线程栈大小
4,//线程优先级
20);//线程时间片
//启动线程
rt_thread_startup(tid2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
// while (1)
// {
// /* USER CODE END WHILE */
// /* USER CODE BEGIN 3 */
//
// }
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/**************** (C) COPYRIGHT STMicroelectronics ****END OF FILE***/
测试代码使用RT-Thread的动态线程创建函数rt_thread_create()创建了2个线程,在线程里面间隔不同的时间翻转LED。
将程序下载到开发板,可以看到LED1和LED2不同频率闪烁: