数据结构 - 第六章 图
定义
图 (Graph) 是由顶点的有穷非空集合和顶点之间边的集合组成,结点之间存在多对多的关系。通常表示为:G ( V, E )。其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合。
简单图:不存在顶点到其自身的边,且同一条边不重复出现。
完全图:任意两个顶点之间都存在边。有向图中,要求两个顶点存在互相指向的边。
有向图:两顶点间的边有方向,用<>表示。
无向图:两顶点间的边无方向,用()表示。
稀疏图:有很少条边或弧的图,反之称为稠密图。
网:边或弧具有与它相关的数字的图,数字即权重。
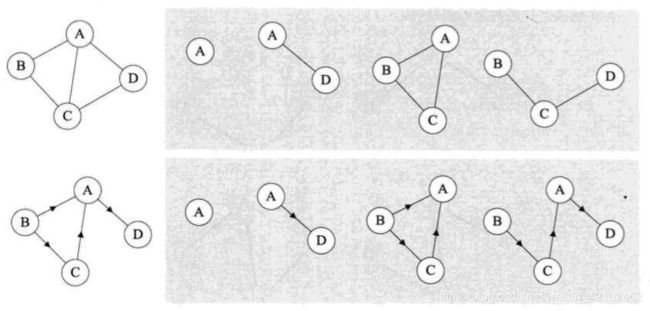
图与子图的关系,如下图所示。
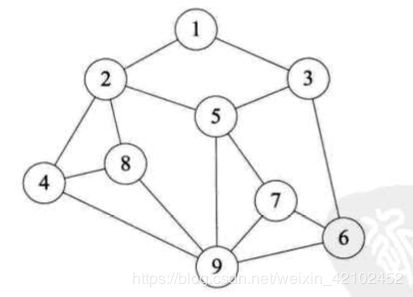
路径:构成两点间通路的顶点序列,路径的长度是路径上的边或弧的数目。
环/回路:第一个顶点到最后一个顶点相同的路径。
连通图:图中任意两个结点都是连通的。
连通分量:无向图中的极大连通子图。
强连通分量:有向图中的极大强连通子图。
极小连通子图:连通图的生成树,它含有图中全部的n个顶点,但只有足以构成一棵树的 n-1 条边。非连通图的多棵生成树构成一个生成森林。
存储结构
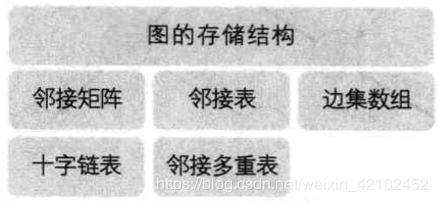
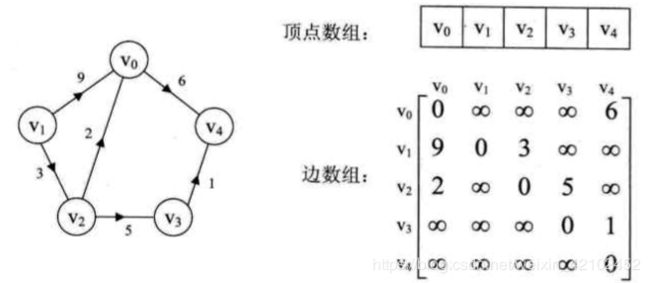
邻接矩阵存储方式是用两个数组来表示图。一个一维数组存储图中顶点信息,一个二维数组(称为邻接矩阵)存储图中的边或弧的信息。适用于稠密图。


邻接表是一种数组与链表相结合的存储方法。适用于稀疏图。
1、图中顶点用一个一维数组存储,当然,顶点也可以用单链表来存储,不过数组可以较容易地读取顶点信息,更加方便。另外,对于顶点数组中,每个数据元素还需要存储指向第一个邻接点的指针,以便于查找该顶点的边信息。
2、图中每个顶点Vi的所有邻接点构成一个线性表,由于邻接点的个数不定,所以用单链表存储,无向图称为顶点VI的边表,有向图则称为顶点Vi作为弧尾的出边表。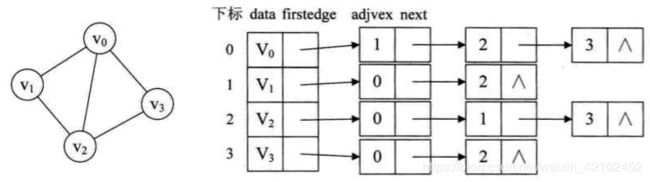
十字链表即有向图的邻接多重表,把邻接表与逆邻接表结合起来,同时关心了入度和出度的问题。
顶点的结点结构为![]() 。其中firstin表示入边表头指针,指向该顶点的入边表中第一一个结点, firstout 表示出边表头指针,指向该顶点的出边表中的第一个结点。
。其中firstin表示入边表头指针,指向该顶点的入边表中第一一个结点, firstout 表示出边表头指针,指向该顶点的出边表中的第一个结点。
边的结点结构为![]() 。其中tailvex 是指弧起点在顶点表的下标,headvex 是指弧终点在顶点表中的下标,headlink 是指入边表指针域,指向终点相同的下一条边,taillink 是指边表指针域,指向起点相同的下一条边。如果是网,还可以再增加一个weight域来存储权值。
。其中tailvex 是指弧起点在顶点表的下标,headvex 是指弧终点在顶点表中的下标,headlink 是指入边表指针域,指向终点相同的下一条边,taillink 是指边表指针域,指向起点相同的下一条边。如果是网,还可以再增加一个weight域来存储权值。
邻接多重表即无向图的邻接多重表,仿照了十字链表的格式。
边的结点结构为![]() 。其中ivex和jvex是与某条边依附的两个顶点在顶点表中下标。ilink 指向依附顶点ivex的下一条边,jlink 指向依附顶点jvex的下一条边。
。其中ivex和jvex是与某条边依附的两个顶点在顶点表中下标。ilink 指向依附顶点ivex的下一条边,jlink 指向依附顶点jvex的下一条边。
图的遍历
深度优先遍历,简称DFS。
基本思想是从图中某个顶点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。对于非连通图,只需要对它的连通分量分别进行深度优先遍历,即在先前一个顶点进行一次深度优先遍历后,若图中尚有顶点未被访问,则另选图中一个未曾被访问的顶点作起始点,重复上述过程,直至图中所有顶点都被访问到为止。
对比两个不同存储结构的深度优先遍历算法,对于n个顶点e条边的图来说,邻接矩阵由于是二维数组,要查找每个顶点的邻接点需要访问矩阵中的所有元素,因此都需要O(n2)的时间。而邻接表做存储结构时,找邻接点所需的时间取决于顶点和边的数量,所以是O(n+e)。
显然对于点多边少的稀疏图来说,邻接表结构使得算法在时间效率上大大提高。
广度优先遍历,简称BFS。
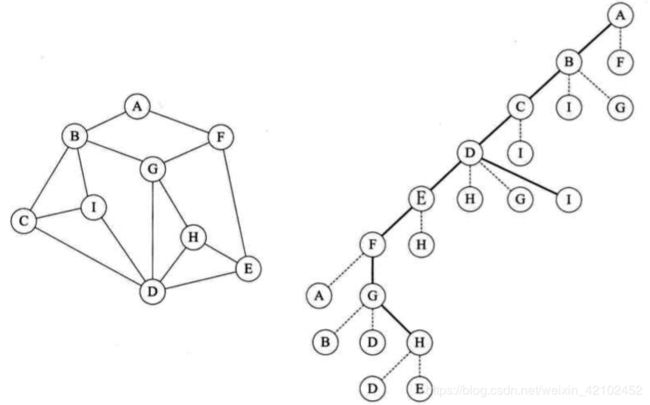
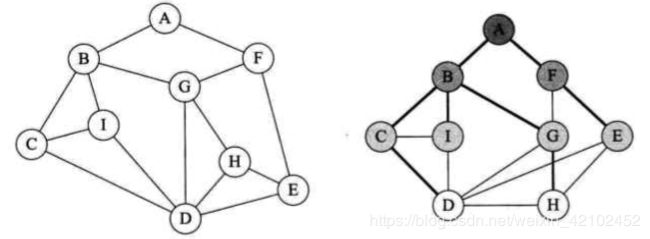
基本思想类似于树的层序遍历。我们将第一幅图稍微变形,变形原则是顶点A放置在最上第一层,让与它有边的顶点B、F为第二层,再让与B和F有边的顶点C、I、G、E为第三层,再将这四个顶点有边的D、H放在第四层,如第二幅图所示。此时在视觉上感觉图的形状发生了变化,其实顶点和边的关系还是完全相同的。
BFS与DFS的时间复杂度完全相同。
最小生成树
最小生成树即构造连通网的最小代价生成树。对比两个算法,克鲁斯卡尔算法主要是针对边来展开,边数少时效率会非常高,
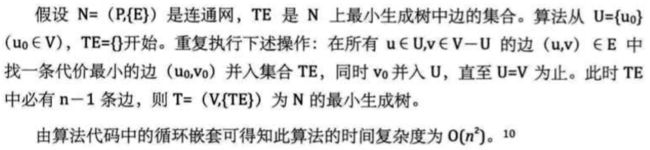
所以对于稀疏图有很大的优势;而普里姆算法对于稠密图,即边数非常多的情况会更好一些。
Prim算法
Kruskal算法
最短路径
在网图和非网图中,最短路径的含义是不同的。
由于非网图它没有边上的权值,可看做是所有的边的权值都为1的网。所谓的最短路径,其实就是指两顶点之间经过的边数最少的路径。而对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。
Dijkstra算法(单源最短路径)
时间复杂度为O(n^2)。具体实现方式见例题。
Floyd算法(多源最短路径)
时间复杂度为O(n^3)。具体实现方式见例题。
拓扑排序
AOV网:在一个表示工程的有向图中,用顶点表示活动,用弧表示活动之间的优先关系。AOV网中的弧表示活动之间存在的某种制约关系。即只有完成了某项活动,才能开始下一项。
设G=(V,E)是一个具有n个顶点的有向图,V中的顶点序列V1, V2, ..... Vn,满足若从顶点vi到vj有一条路径,则在顶点序列中顶点vi必在顶点vj之前。则我们称这样的顶点序列为一个拓扑序列。
所谓拓扑排序,其实就是对一个有向图构造拓扑序列的过程。构造时会有两个结果,如果此网的全部顶点都被输出,则说明它是不存在环的AOV网;如果输出顶点数少了,哪怕是少了一个,也说明这个网存在环,不是AOV网。
整个算法的时间复杂度为O(n+e)。
关键路径
AOE网:在一个表示工程的带权有向图中,用顶点表示事件,用有向边表示活动,用边上的权值表示活动的持续时间。即针对有权值的网络的排序。
我们把AOE网中没有入边的顶点称为始点或源点,没有出边的顶点称为终点或汇点。由于一个工程,总有一个开始,一个结束,所以正常情况下,AOE网只有一个源点和一个汇点。Vo即是源点,表示一个工程的开始,V9是汇点,表示整个工程的结束,顶点 Vo, V1,..... V9分别表示事件,弧
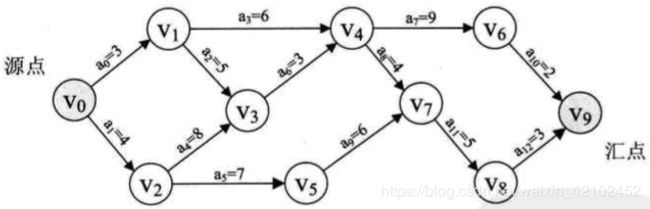
我们把路径上各个活动所持续的时间之和称为路径长度,从源点到汇点具有最大长度的路径叫关键路径,在关键路径上的活动叫关键活动。只有缩短关键路径上的关键活动时间才可以减少整个工期长度。
1、事件的最早发生时间 etv:即顶点Vk的最早发生时间。
2、事件的最晚发生时间 ltv:即顶点Vk的最晚发生时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个工期。
3、活动的最早开工时间 ete:即弧ak的最早发生时间。
4、活动的最晚开工时间 lte:即弧ak的最晚发生时间,也就是不推迟工期的最晚开工时间。


整个算法的时间复杂度为O(n+e)。
参考教材:
《数据结构与算法》,熊岳山著,清华大学出版社,2016,第二版
《2020年数据结构考研复习指导》,电子工业出版社,2020