树莓派智能小车
最近在研究树莓派,也从CSDN上面汲取了很多大神的代码。
我的小车目前正在开发中,已经基本成型。
我把我的代码和物理连接设计图共享出来。
希望能够和树莓派爱好者们一起开发出高水平的树莓派机器人。
有问题想讨论可以发邮件给我,或者Github。
https://gist.github.com/CC12345PI
物理连接图:
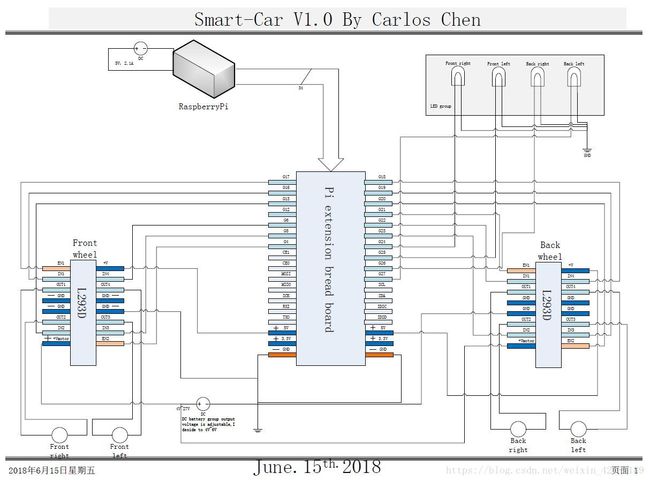
设计图:
# -*- coding: utf-8 -*-
"""
Created on Sat May 26 11:03:58 2018
small car control main progress
Platform is python+raspberrypi 3B.
Follow scripts not include rear wheel and LED control.
Those part will updated soon.
@author: [email protected]
"""
def system_ini():
GPIO.setmode(GPIO.BCM)
GPIO.setup(Red,GPIO.OUT) #RED LED
GPIO.setup(Blue,GPIO.OUT) #BLUE LED
GPIO.setup(Green,GPIO.OUT) #GREEN LED
GPIO.setup(Enable1_Pin,GPIO.OUT,initial=GPIO.LOW) #
GPIO.setup(input3_pin,GPIO.OUT,initial=GPIO.LOW) #
GPIO.setup(input4_pin,GPIO.OUT,initial=GPIO.LOW) #
GPIO.setup(Enable2_Pin,GPIO.OUT,initial=GPIO.LOW) #
GPIO.setup(input1_pin,GPIO.OUT,initial=GPIO.LOW) #
GPIO.setup(input2_pin,GPIO.OUT,initial=GPIO.LOW) #
print ("初始化完成")
def cleanup():
GPIO.output(input3_pin, GPIO.HIGH)
GPIO.output(input4_pin, GPIO.HIGH)
GPIO.output(Enable1_Pin, GPIO.HIGH)
GPIO.output(input1_pin, GPIO.HIGH)
GPIO.output(input2_pin, GPIO.HIGH)
GPIO.output(Enable2_Pin, GPIO.HIGH)
GPIO.cleanup()
print ("清理完成")
def forward():
system_ini()
#left-front正传
print ("前进forward")
#left-front
GPIO.output(input3_pin, GPIO.LOW)
GPIO.output(input4_pin, GPIO.HIGH)
GPIO.output(Enable1_Pin, GPIO.HIGH)
#right-front
GPIO.output(input1_pin, GPIO.LOW)
GPIO.output(input2_pin, GPIO.HIGH)
GPIO.output(Enable2_Pin, GPIO.HIGH)
GPIO.output(Red,GPIO.HIGH)
time.sleep(0.05)
def backward():
system_ini()
print ("后退backward")
#left-front
GPIO.output(input3_pin, GPIO.HIGH)
GPIO.output(input4_pin, GPIO.LOW)
GPIO.output(Enable1_Pin, GPIO.HIGH)
GPIO.output(Blue, GPIO.HIGH)
#right-front
GPIO.output(input1_pin, GPIO.HIGH)
GPIO.output(input2_pin, GPIO.LOW)
GPIO.output(Enable2_Pin, GPIO.HIGH)
time.sleep(0.05)
def left90D():
#此代码不包括后轮的转向。
#直流马达在DC3V的情况下是,100转/分, 所以0.15秒对应0.25转, 0.3秒对应0.5转。
#我们的转向按照0.25转为单位微调。配合车前后的传感器进行检测是否撞墙。
system_ini()
print ("turn left 90 degree")
#left-front stop
GPIO.output(input3_pin, GPIO.HIGH)
GPIO.output(input4_pin, GPIO.HIGH)
GPIO.output(Enable1_Pin, GPIO.HIGH)
GPIO.output(Blue, GPIO.HIGH)
#right-front forward 0.15 second
GPIO.output(input1_pin, GPIO.LOW)
GPIO.output(input2_pin, GPIO.HIGH)
GPIO.output(Enable2_Pin, GPIO.HIGH)
time.sleep(0.05)
def right90D():
#此代码不包括后轮的转向。
#直流马达在DC3V的情况下是,100转/分, 所以0.15秒对应0.25转, 0.3秒对应0.5转。
#我们的转向按照0.25转为单位微调。配合车前后的传感器进行检测是否撞墙。
system_ini()
print ("turn rigth 90 degree")
#left-front forward 0.15 second
GPIO.output(input3_pin, GPIO.LOW)
GPIO.output(input4_pin, GPIO.HIGH)
GPIO.output(Enable1_Pin, GPIO.HIGH)
GPIO.output(Blue, GPIO.HIGH)
#right-front stop for 5 second
GPIO.output(input1_pin, GPIO.HIGH)
GPIO.output(input2_pin, GPIO.HIGH)
GPIO.output(Enable2_Pin, GPIO.HIGH)
time.sleep(0.05)
def stop():
print ("stop")
#left-front forward second
GPIO.output(input3_pin, GPIO.LOW)
GPIO.output(input4_pin, GPIO.LOW)
GPIO.output(Enable1_Pin, GPIO.LOW)
GPIO.output(Blue, GPIO.HIGH)
#right-front stop for 5 second
GPIO.output(input1_pin, GPIO.LOW)
GPIO.output(input2_pin, GPIO.LOW)
GPIO.output(Enable2_Pin, GPIO.LOW)
if __name__ == '__main__':
try:
#run your code
import RPi.GPIO as GPIO
import time
from evdev import InputDevice
from select import select
dev = InputDevice('/dev/input/event0')
GPIO.setmode(GPIO.BCM)
Red = 24
Blue = 25
Green = 26
#left-front
Enable1_Pin = 4
input3_pin = 5
input4_pin = 6
#right-front
Enable2_Pin = 17
input1_pin = 16
input2_pin = 13
#系统初始化
system_ini()
#
#控制电压输出
while True:
select([dev], [], [])
for event in dev.read():
print 'code:%s value:%s' % (event.code, event.value)
if event.code == 103 and event.value == 2:
print ("forward")
forward()
elif event.code == 103 and event.value == 0:
print("stop forward")
stop()
elif event.code == 108 and event.value == 2:
print("backward")
backward()
elif event.code == 108 and event.value == 0:
print("backward STOP ")
stop()
elif event.code == 105 and event.value == 2:
print("LEFT")
left90D()
elif event.code == 105 and event.value == 0:
print("stop ")
stop()
elif event.code == 106 and event.value == 2:
print("Right")
right90D()
elif event.code == 106 and event.value == 0:
print("stop ")
stop()
elif event.code == 57:
stop()
except(BaseException),e:
print(e)
finally:
GPIO.cleanup()