(15) 基于图卷积神经网络的共享单车流量预测
交通预见未来(3) 基于图卷积神经网络的共享单车流量预测
1、文章信息
《Bike Flow Prediction with Multi-Graph Convolutional Networks》。
文章来自2018年第26届ACM空间地理信息系统进展国际会议论文集,作者来自香港科技大学,被引7次。
2、摘要
由于单站点流量预测的难度较大,近年来的研究多根据站点类别进行流量预测。但是,它们不能直接指导站点级的精细化系统管理。本文将应用深度学习技术进行站点级别的共享单车流量预测。本文提出了一种多图卷积神经网络模型来预测站点级的流量,其关键创新之处在于从图的角度来观察共享单车系统。更具体地说,我们为一个自行车共享系统构造了多个图来反映异构的站间关系。然后,我们融合了多个图形,并应用卷积层来预测未来的站点级自行车流量。
3、简介
本文所述的共享单车系统为有桩共享单车。单站点自行车流量往往具有复杂的动态规律,这使得其预测变得困难。因此,既有研究大多根据站点类别解决自行车流量预测问题。也就是说,他们首先将站点分类,然后预测每个类别的自行车流量。但基于类别的预测有两个问题:(1):聚类结果很难评估是否合适;(2):基于类别的预测结果不能进行站点级别的运营管理指导。
本文中,我们提出了一种新的多图卷积神经网络来捕捉不同站点之间的空间关系,例如距离和历史使用关系。在多图卷积层的基础上,提出了一种包含LSTM的encoder-decoder编码解码器结构,用来捕捉时间关系。因此,对于站点级自行车流量预测,可以有效地捕捉时空模式。
据我们所知,这是首次利用多图卷积神经网络来进行站点级别的共享自行车系统中流量预测。To the best of our knowledge, this is the first work of leveraging multi-graph convolutional neural networks in to predict station-level bike flow in a bike sharing system. 本文案例为纽约和芝加哥的共享单车系统。
4、概念定义和问题描述
共享单车系统图:共享单车系统用加权图表示,节点为站点,边为站点间关系。边的权值表示站与站之间的关系强度。通常,权重越大,两个站点的相关性越高。如何构造图是我们方法的关键部分。
自行车流量:有两种类型的自行车流量:流入和流出inflow and outflow。
问题描述:利用t时刻以前的进站流和出站流预测t时刻的进站流和出站流。
5、主体内容
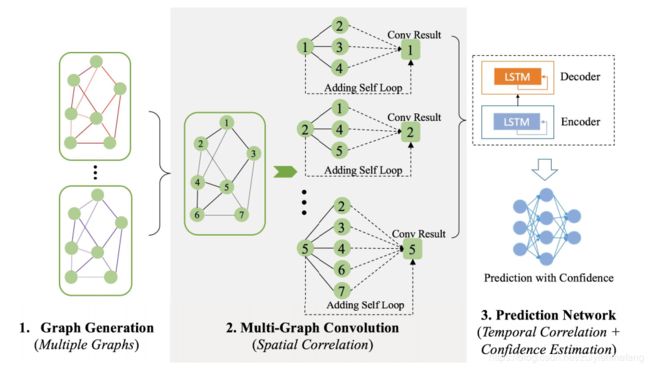
本文提出的多图卷积神经网络包含三部分,图生成-多图卷积-预测部分。
图生成:图的生成是图卷积模型成功的关键,如果所构建的图不能对站点间的有效关系进行编码,不仅不利于网络参数的学习,还会降低预测性能。一般来说,我们希望为具有相似动态流模式的站点之间的边缘分配较大的权重。在此基础上,提出了建立站间图的三种方法:距离图、交互图和相关图。
权重1:距离图,即用距离的倒数表示站间权重。

权重2:交互图,即用历史数据中两个车站之间的行车记录数表示站间权重。

权重3:相关图,计算每个站在每个时间间隔(如1小时)内的历史使用情况(流入或流出),然后计算每两个站之间的相关性作为图中站间权重。本文使用皮尔逊系数来计算相关性。

多图卷积:此部分可分为两块主要内容:图融合以及图卷积。
图融合即将上面的三个图权重矩阵融合为一个图权重。我们首先对每个图的邻接矩阵A进行标准化,然后通过在元素级对不同图的邻接矩阵加权求和来组合不同的图。
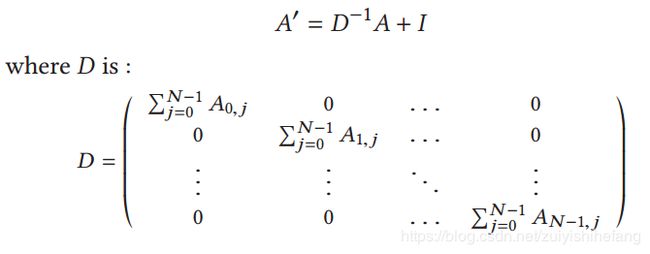
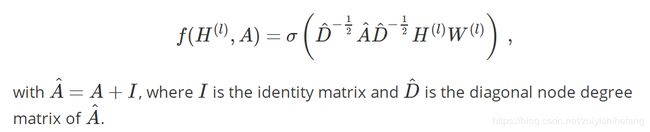
A为邻接矩阵,D为度矩阵,A’ 为标准化后的临界矩阵。这一块其实更常用的方法如下图:
为了使加权和运算后的融合结果保持归一化,我们在加权矩阵中进一步增加了一个softmax运算。假设我们有N个图要混合在一起(即W1至Wn代表一条边的N个权重),我们可以把图的融合过程表示为:
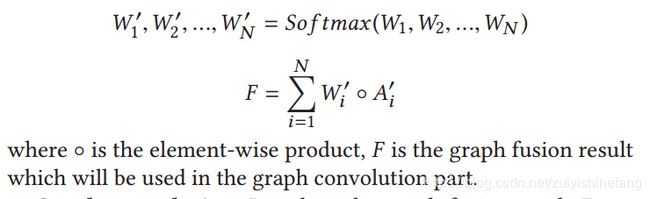
○代表元素积,F为融合结果,用于后面的图卷积。(上述过程总结起来就是先把邻接矩阵标准化,然后把N个权重矩阵进行softmax运算,再将两者进行加权相乘得到融合结果)
图卷积过程即为如下过程:
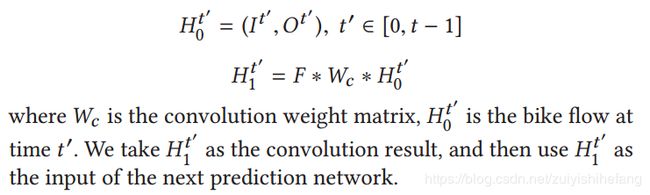
预测网络图如下:
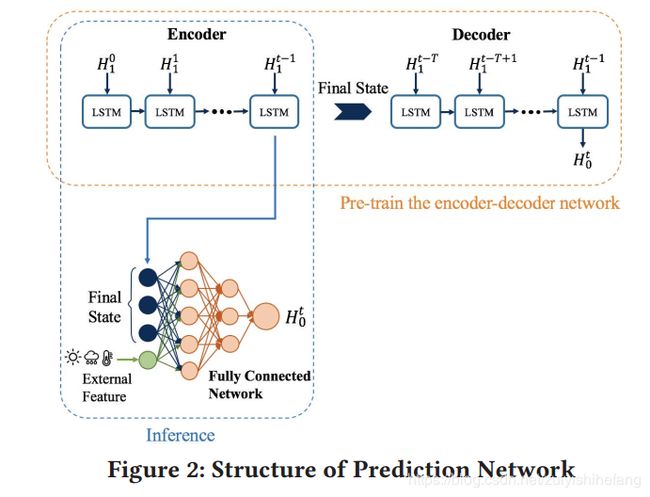
采用encoder-decoder结构的预测网络详细如图2所示。编码器网络采用多图卷积结果序列[H10, H11,…, H1t - 1]作为输入,将时间模式编码为final状态。解码器网络以编码器的final状态为初始状态,以多图卷积结果序列[H1t - T, H1t - T +1,…, H1t - 1]作为输入(此处有点难理解,可理解为假设encode部分的输入为10个时间步,则decoder部分的输入为5个时间步,两者的输入都是多图卷积结果,只不过输入的序列长度不一样)。解码器的输出为H0t,即为预测目标。我们可以将T设置为一个小的值(例如t的一半),这意味着解码器可以根据短时间的历史数据和编码器的final状态预测未来的自行车流量。这也意味着编码器的final状态为预测过程提供了重要的信息。在对编解码器结构进行预训练后,将编码器网络的final状态与外部因素(例如,温度,风速,工作日/周末)进行结合,输入到一个全连接层 (图2的下部)预测自行车下次H0t流动。(先利用黄框对encoder-decoder结构进行预训练,提取encoder部分,利用蓝框作为最终的预测网络模型)
6、案例研究
本文的案例选用纽约和芝加哥的共享单车数据集,不再详述(目前公开的是从2013到2019年五年的数据)。公众号后台回复“纽约”获取纽约数据集下载地址,回复“芝加哥”获取芝加哥数据集下载地址。
关注微信公众号《当交通遇上机器学习》,
后台回复“数据”即可获取高达175G的四个月的滴滴GPS数据和滴滴订单数据的获取方式,以及从数据处理(Oracle数据库)、模型构建(机器学习)、编程实现(python)到可视化(ArcGIS)等一系列视频教程。
后台回复“纽约”获取美国纽约10年的出租车轨迹数据以及7年的共享单车轨迹数据下载地址。
公众号以交通大数据为主线,专注于人工智能、机器学习、深度学习在道路交通和轨道交通领域内的科研前沿与应用,在交通大数据与机器学习的道路上越走越远!
