Autoware入门学习(三)——Autoware软件功能使用介绍(1/3)及demo演示
文章目录
- 1 Autoware 的官方 demo 演示
- 1.1 数据下载(点击链接or指令均可)
- 1.2 Demo 运行
- 2 Autoware 软件功能使用介绍(1/3)
- 2.1 Quick Start
- 2.2 Setup
- 2.3 Map
- 3 Autoware 软件其他模块介绍
1 Autoware 的官方 demo 演示
干巴巴地介绍软件没什么意思,最快的上手方法就是跑官方 demo 了,这次就先演示一下流程,下一章再详细地介绍软件
可以参考 demo 演示的官方网址
官方也有上传演示的视频,我也在bilibili上转载了,方便学习https://www.bilibili.com/video/BV14g4y1q7uW
1.1 数据下载(点击链接or指令均可)
- 下载样本3D 点云 / 地图数据。链接
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz
- 以
ROSBAG格式下载示例数据(LiDAR:VELODYNE HDL-32E,GNSS:JAVAD GPS RTK Delta 3)。链接
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz
如果上述数据下载速度较满的话,可以使用官方提供的 云端镜像
1.2 Demo 运行
运行 demo 的前提是 data 和 rosbag 都已经下载到了 Downloads文件夹中
- 创建.autoware目录(隐藏文件夹)并提取 demo 所需数据
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/Downloads/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz
- 运行 Autoware
$ cd autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
-
运行起来之后,需要加载 demo 示例的 data,转到
Simulation选项卡,单击Ref按钮找到如下图所示路径的 bag 包,若是找不到文件夹,右击看一下Show Hidden Files有没有勾选上。加载完毕之后设置开始时间140,点击play,然后再点击Pause暂停播放。

-
再点击 Quick Start 选项卡,然后分别点击 map 和 localizations 右侧
Ref按钮,分别加载下图中所示路径的对应文件,选择好后,点击左侧的Map和Localizations按钮,显示变暗。(对应路径autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/) -
然后再点击
Rviz按钮启动rviz插件,找到File -> Open Config,然后按照下面的步骤顺序并加载.rviz文件。
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz -
回到
simulation,点击pause按键开始播放,软件运行。

2 Autoware 软件功能使用介绍(1/3)
可以参考 Autoware 的用户手册(英文),https://github.com/CPFL/Autoware-Manuals
下载速度太慢的也可以直接从我上传的资源来下,也可以评论留邮箱我直接发给你。
Autoware的官方使用手册(pdf+doc)+快速开始指南(pdf+ppt)+自动驾驶部署指南(pdf)共计5个文档:https://download.csdn.net/download/zhao5269/12540148
这一章会按照Autoware的Runtime Manager选项卡的顺序来介绍前3个选项卡模块的功能:
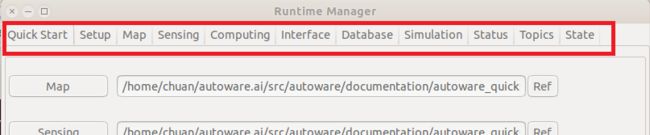
首先,要启动Runtime Manager:
$ cd autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
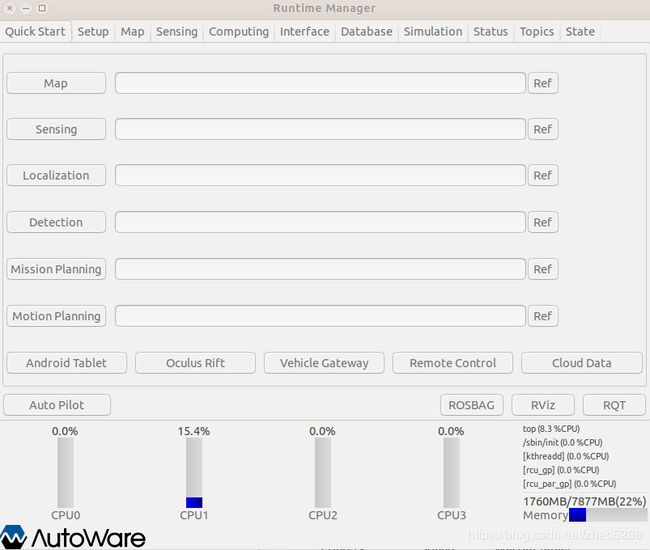
2.1 Quick Start
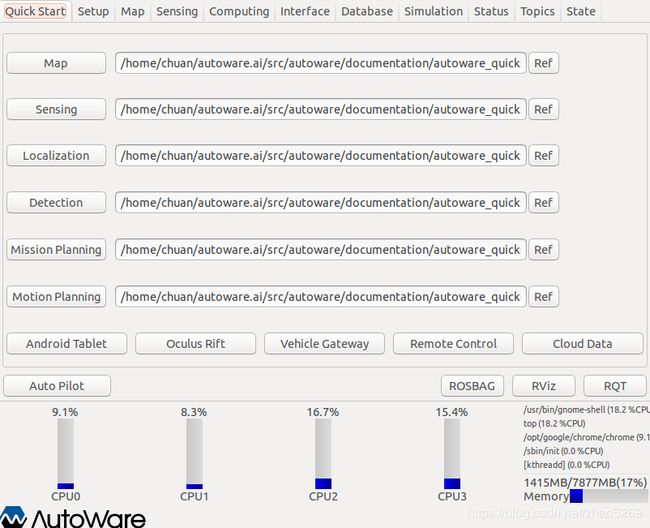
Map 地图:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Sensing 传感器:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Localization 定位:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Detection 目标检测:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Mission Planning 任务规划:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Motion Planning 运动规划:启动/结束文本框中的完整路径指定的启动脚本.launch文件。可以点击后面的Ref按钮从文件中选择脚本。Android Tablet 安卓平板电脑:启动/结束通信脚本runtime_manager/tablet_socket.launch完成与平板电脑的通信,基本用不上。Oculus Rift不懂什么作用。Vehicle Gateway 车联网模块:启动/结束脚本runtime_manager/vehicle_socket.launch与ZMP(日本机器人、自动驾驶公司)Robocar(改装的基于Autoware的自动驾驶丰田车)通信,自己开发的话用不上。Cloud Data 云数据:不懂什么作用,可能是可以与云端通信吧,直接使用云端的数据。Auto Pilot 自动驾驶:根据按钮的状态发布mode_cmd主题。ROSBAG:显示ROSBAG记录对话框的ROSBAG。RViz:开始/结束RViz(ROS自带的一个图形化显示工具)。RQT:开始/结束RQT(基于Qt的ROS GUI开发框架,以插件的形式实现各种GUI工具)。
Quick Start主要实现一个总的快速开始的功能,加载相应的.launch脚本后,单击RViz后即可在RViz中查看地图、点云等信息。
2.2 Setup

单击TF,车辆基坐标位置(base_link)→ 激光雷达位置(Velodyne)的主题发布。
x,y,z,yaw,pitch,roll输入velodyne到base_link的相对位置。
Vehicle Model启动/结束脚本model_publishe/vehicle_model.launch,带参数启动,参数是文本框中指定的URDF(统一机器人描述格式)文件(RViz上显示的车型)的完整路径。或者,可以从按Ref显示的文件选择对话框中选择URDF文件。如果在Vehicle Model文本框中没有指定URDF文件,则使用Autoware/ros/src/.config/Model /default.urdf。
Setup为安装设置模块,Autoware 建图使用的是激光雷达,TF输入的是激光雷达和车辆之间的旋转平移矩阵信息。该模块还需要导入车辆的模型文件。
2.3 Map
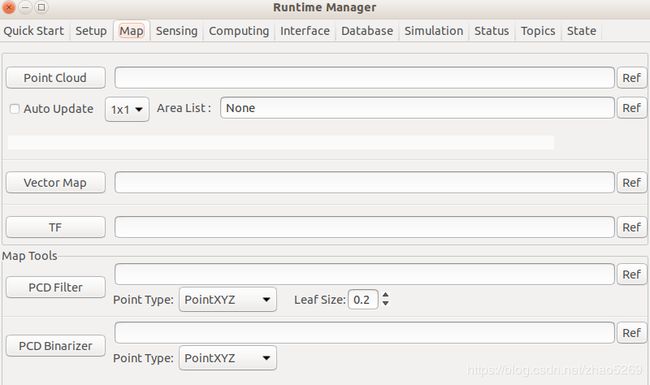
Point Cloud 点云:启动/结束map_file/points_map_loader节点,参数为文本框中指定的3D map(PCD文件)的完整路径。或者,可以通过按Ref显示的文件选择对话框选择3D地图。
Auto Update 自动更新:在启动map_file/points_map_loader时指定自动更新状态(启用或不启用)。可以通过在下拉框中选择一个项来指定自动更新的场景数量。只有在打开“自动更新”复选框时,此配置才有效。在“区域列表”文本框中指定区域列表文件的完整路径,该路径在启动map_file/point_map_loader时用作参数。或者,可以通过按Ref显示的文件选择对话框选择区域列表文件。
Vector Map 矢量地图:使用参数启动/结束map_file/vector_map_loader节点,参数是文本框中指定的Vector map(csv文件)的完整路径。或者,可以通过按Ref显示的文件选择对话框选择矢量图。
TF启动/结束文本框中以完整路径指定的启动文件。如果没有指定启动文件,则启动文件~/.autoware/data/tf/tf。可以通过按Ref显示的文件选择对话框选择启动文件。
地图工具
PCD Filter PCD滤波器:启动/结束带有参数的map_tools/pcd_filter节点,参数是文本框中指定的3D 映射(PCD文件)的完整路径。或者,可以通过按Ref显示的文件选择对话框选择3D 地图。
PCD Binarizer 二进制启动/结束带有参数的map_tools/pcd_binalizer节点,参数是文本框中指定的ASCII格式PCD文件的完整路径。或者,可以通过按Ref显示的文件选择对话框选择PCD文件。
Map模块为地图输入模块,地图一般为激光雷达slam建的地图。
3 Autoware 软件其他模块介绍
Autoware 的 Runtime Manager 软件提供的选项卡模块比较多,功能也比较丰富,后续会分两次介绍完,感兴趣的朋友可以关注我后续的博客:
Autoware入门学习(四)——Autoware软件功能使用介绍(2/3)
Autoware入门学习(五)——Autoware软件功能使用介绍(3/3)