H.266/VVC代码学习28:Dependent Quantization
好久没看266的代码,感觉太难懂了,各种变量各种类,也没有个注释,只能抱着读书百遍其义自现的真理一遍一遍debug,最后大部分看懂了,有些不懂的以后有机会慢慢补。今天记录的是vvc中的新工具,dependent quantization。先上点简单的原理:
依赖量化器的方法的实现如下所示:
- 定义两个不同重建水平的标量量化器
- 定义一个两个标量量化器之间的切换过程

这两个标量量化器用q1,q2表示。可用的重建水平的位置由量化步长唯一指定。使用的标量量化器不用在比特流中发送。相反,当前变换系数使用的量化器有当前变换系数之前的变换系数水平的parties(奇偶性)决定。
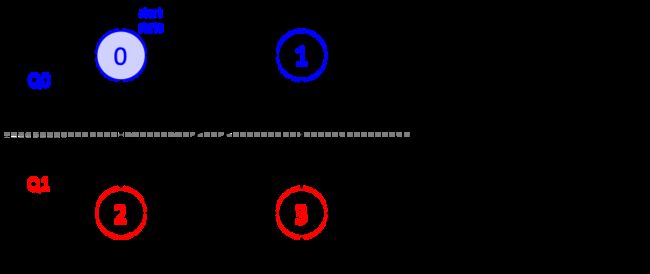
如上图所示,两个标量量化器之间的切换通过有四状态的状态机实现。状态可以用4个不同的值0,1,2,3表示。他由当前变换系数之前的变换系数水平的参数唯一确定。在一个变换块的反量化开始时,状态设置为0。变换系数按照扫描顺序重建。在重建完当前系数后,状态会被更新,k表示变换系数水平的值(量化后的)。
下面上代码:
void DepQuant::quant( TransformUnit& tu, const CCoeffBuf& srcCoeff, const ComponentID compID, const QpParam& cQP, const double lambda, const Ctx& ctx, TCoeff& absSum, bool enableScalingLists, int* quantCoeff )
{
CHECKD( tu.cs->sps->getSpsRangeExtension().getExtendedPrecisionProcessingFlag(), "ext precision is not supported" );
//===== reset / pre-init =====
const TUParameters& tuPars = *g_Rom.getTUPars( tu.blocks[compID], compID );
m_quant.initQuantBlock ( tu, compID, cQP, lambda );
TCoeff* qCoeff = tu.getCoeffs( compID ).buf;
const TCoeff* tCoeff = srcCoeff.buf;
const int numCoeff = tu.blocks[compID].area();
::memset( tu.getCoeffs( compID ).buf, 0x00, numCoeff*sizeof(TCoeff) );
absSum = 0;
const CompArea& area = tu.blocks[ compID ];
const uint32_t width = area.width;
const uint32_t height = area.height;
const uint32_t lfnstIdx = tu.cu->lfnstIdx;
//===== scaling matrix ====
//const int qpDQ = cQP.Qp + 1;
//const int qpPer = qpDQ / 6;
//const int qpRem = qpDQ - 6 * qpPer;
//TCoeff thresTmp = thres;
bool zeroOut = false;
bool zeroOutforThres = false;
int effWidth = tuPars.m_width, effHeight = tuPars.m_height;
if( ( tu.mtsIdx[compID] > MTS_SKIP || (tu.cs->sps->getUseMTS() && tu.cu->sbtInfo != 0 && tuPars.m_height <= 32 && tuPars.m_width <= 32)) && compID == COMPONENT_Y)
{
effHeight = (tuPars.m_height == 32) ? 16 : tuPars.m_height;
effWidth = (tuPars.m_width == 32) ? 16 : tuPars.m_width;
zeroOut = (effHeight < tuPars.m_height || effWidth < tuPars.m_width);
}
zeroOutforThres = zeroOut || (32 < tuPars.m_height || 32 < tuPars.m_width);
//===== find first test position =====
int firstTestPos = numCoeff - 1;
if (lfnstIdx > 0 && tu.mtsIdx[compID] != MTS_SKIP && width >= 4 && height >= 4)
{
firstTestPos = ( ( width == 4 && height == 4 ) || ( width == 8 && height == 8 ) ) ? 7 : 15 ;
}
const TCoeff defaultQuantisationCoefficient = (TCoeff)m_quant.getQScale();
const TCoeff thres = m_quant.getLastThreshold();
for( ; firstTestPos >= 0; firstTestPos-- )//反向扫描找到第一个非零系数
{
if (zeroOutforThres && (tuPars.m_scanId2BlkPos[firstTestPos].x >= ((tuPars.m_width == 32 && zeroOut) ? 16 : 32)
|| tuPars.m_scanId2BlkPos[firstTestPos].y >= ((tuPars.m_height == 32 && zeroOut) ? 16 : 32)))
continue;
TCoeff thresTmp = (enableScalingLists) ? TCoeff(thres / (4 * quantCoeff[tuPars.m_scanId2BlkPos[firstTestPos].idx]))
: TCoeff(thres / (4 * defaultQuantisationCoefficient));
if (abs(tCoeff[tuPars.m_scanId2BlkPos[firstTestPos].idx]) > thresTmp)
{
break;
}
}
if( firstTestPos < 0 )
{
return;
}
//===== real init =====
RateEstimator::initCtx( tuPars, tu, compID, ctx.getFracBitsAcess() );
m_commonCtx.reset( tuPars, *this );
for( int k = 0; k < 12; k++ )
{
m_allStates[k].init();
}
m_startState.init();
int effectWidth = std::min(32, effWidth);
int effectHeight = std::min(32, effHeight);
for (int k = 0; k < 12; k++)
{
m_allStates[k].effWidth = effectWidth;
m_allStates[k].effHeight = effectHeight;
}
m_startState.effWidth = effectWidth;
m_startState.effHeight = effectHeight;
mycount++;
//===== populate trellis,尝试不同的量化状态链,最主要的函数 =====
for( int scanIdx = firstTestPos; scanIdx >= 0; scanIdx-- )
{
const ScanInfo& scanInfo = tuPars.m_scanInfo[ scanIdx ];
if (enableScalingLists)
{
m_quant.initQuantBlock(tu, compID, cQP, lambda, quantCoeff[scanInfo.rasterPos]);
xDecideAndUpdate( abs( tCoeff[scanInfo.rasterPos]), scanInfo, (zeroOut && (scanInfo.posX >= effWidth || scanInfo.posY >= effHeight)), quantCoeff[scanInfo.rasterPos] );
}
else
xDecideAndUpdate( abs( tCoeff[scanInfo.rasterPos]), scanInfo, (zeroOut && (scanInfo.posX >= effWidth || scanInfo.posY >= effHeight)), defaultQuantisationCoefficient );
}
//===== find best path,确定rdcost最小的量化状态链 =====
Decision decision = { std::numeric_limits::max(), -1, -2 };
int64_t minPathCost = 0;
for( int8_t stateId = 0; stateId < 4; stateId++ )
{
int64_t pathCost = m_trellis[0][stateId].rdCost;
if( pathCost < minPathCost )
{
decision.prevId = stateId;
minPathCost = pathCost;
}
}
//===== backward scanning,根据上面确定的最优量化状态链正向扫描 =====
int scanIdx = 0;
for( ; decision.prevId >= 0; scanIdx++ )
{
decision = m_trellis[ scanIdx ][ decision.prevId ];
int32_t blkpos = tuPars.m_scanId2BlkPos[scanIdx].idx;
qCoeff[ blkpos ] = ( tCoeff[ blkpos ] < 0 ? -decision.absLevel : decision.absLevel );
absSum += decision.absLevel;
}
} 其中xDecideAndUpdate是最主要的函数,通过该函数实现每个变换系数的state和量化系数,还有每种量化状态链的rdcost;而函数xDecideAndUpdate里最主要的还是xDecide函数,所以先上xDecide函数,再上xDecideAndUpdate函数;
void DepQuant::xDecide( const ScanPosType spt, const TCoeff absCoeff, const int lastOffset, Decision* decisions, bool zeroOut, int quanCoeff)
{
::memcpy( decisions, startDec, 8*sizeof(Decision) );
if( zeroOut )
{
if( spt==SCAN_EOCSBB )
{
m_skipStates[0].checkRdCostSkipSbbZeroOut( decisions[0] );
m_skipStates[1].checkRdCostSkipSbbZeroOut( decisions[1] );
m_skipStates[2].checkRdCostSkipSbbZeroOut( decisions[2] );
m_skipStates[3].checkRdCostSkipSbbZeroOut( decisions[3] );
}
return;
}
PQData pqData[4];//存储4个预量化值的相关参数
m_quant.preQuantCoeff( absCoeff, pqData, quanCoeff );//对absCoeff进行4次预量化,得到量化后的值和量化成该值的rdcost,第0个和第3个量化值是偶数,第1个和第2个量化值是奇数;
m_prevStates[0].checkRdCosts( spt, pqData[0], pqData[2], decisions[0], decisions[2]);//前一个量化状态是0,则当前状态可以是0或者2,根据rdcost更新decision[0/2].rdcost的值
m_prevStates[1].checkRdCosts( spt, pqData[0], pqData[2], decisions[2], decisions[0]);//前一个量化状态是1,则当前状态可以是2或者0,根据rdcost更新decision[2/0].rdcost的值
m_prevStates[2].checkRdCosts( spt, pqData[3], pqData[1], decisions[1], decisions[3]);//前一个量化状态是2,则当前状态可以是1或3,根据rdcost更新decision[1/3].rdcost的值
m_prevStates[3].checkRdCosts( spt, pqData[3], pqData[1], decisions[3], decisions[1]);//前一个量化状态是3,则当前状态可以是3或者1,根据rdcost更新decision[3/1].rdcost的值
if( spt==SCAN_EOCSBB )
{
m_skipStates[0].checkRdCostSkipSbb( decisions[0] );
m_skipStates[1].checkRdCostSkipSbb( decisions[1] );
m_skipStates[2].checkRdCostSkipSbb( decisions[2] );
m_skipStates[3].checkRdCostSkipSbb( decisions[3] );
}
//下面两个主要在量化开始的时候会有作用,有点相当于初始化rdcost
m_startState.checkRdCostStart( lastOffset, pqData[0], decisions[0] );
m_startState.checkRdCostStart( lastOffset, pqData[2], decisions[2] );
}
void DepQuant::xDecideAndUpdate( const TCoeff absCoeff, const ScanInfo& scanInfo, bool zeroOut, int quantCoeff )
{
Decision* decisions = m_trellis[ scanInfo.scanIdx ];
std::swap( m_prevStates, m_currStates );
xDecide( scanInfo.spt, absCoeff, lastOffset(scanInfo.scanIdx), decisions, zeroOut, quantCoeff );
if( scanInfo.scanIdx )
{
if( scanInfo.eosbb )
{
m_commonCtx.swap();
m_currStates[0].updateStateEOS( scanInfo, m_prevStates, m_skipStates, decisions[0] );
m_currStates[1].updateStateEOS( scanInfo, m_prevStates, m_skipStates, decisions[1] );
m_currStates[2].updateStateEOS( scanInfo, m_prevStates, m_skipStates, decisions[2] );
m_currStates[3].updateStateEOS( scanInfo, m_prevStates, m_skipStates, decisions[3] );
::memcpy( decisions+4, decisions, 4*sizeof(Decision) );
}
else if( !zeroOut )
{
switch( scanInfo.nextNbInfoSbb.num )//Execute only valid parts
{
case 0:
//更新当前状态为0的rdcost的值为decisions[0].rdcost;
m_currStates[0].updateState<0>( scanInfo, m_prevStates, decisions[0] );
//更新当前状态为1的rdcost的值为decisions[1].rdcost;
m_currStates[1].updateState<0>( scanInfo, m_prevStates, decisions[1] );
//更新当前状态为2的rdcost的值为decisions[2].rdcost;
m_currStates[2].updateState<0>( scanInfo, m_prevStates, decisions[2] );
//更新当前状态为3的rdcost的值为decisions[3].rdcost;
m_currStates[3].updateState<0>( scanInfo, m_prevStates, decisions[3] );
break;
case 1:
m_currStates[0].updateState<1>( scanInfo, m_prevStates, decisions[0] );
m_currStates[1].updateState<1>( scanInfo, m_prevStates, decisions[1] );
m_currStates[2].updateState<1>( scanInfo, m_prevStates, decisions[2] );
m_currStates[3].updateState<1>( scanInfo, m_prevStates, decisions[3] );
break;
case 2:
m_currStates[0].updateState<2>( scanInfo, m_prevStates, decisions[0] );
m_currStates[1].updateState<2>( scanInfo, m_prevStates, decisions[1] );
m_currStates[2].updateState<2>( scanInfo, m_prevStates, decisions[2] );
m_currStates[3].updateState<2>( scanInfo, m_prevStates, decisions[3] );
break;
case 3:
m_currStates[0].updateState<3>( scanInfo, m_prevStates, decisions[0] );
m_currStates[1].updateState<3>( scanInfo, m_prevStates, decisions[1] );
m_currStates[2].updateState<3>( scanInfo, m_prevStates, decisions[2] );
m_currStates[3].updateState<3>( scanInfo, m_prevStates, decisions[3] );
break;
case 4:
m_currStates[0].updateState<4>( scanInfo, m_prevStates, decisions[0] );
m_currStates[1].updateState<4>( scanInfo, m_prevStates, decisions[1] );
m_currStates[2].updateState<4>( scanInfo, m_prevStates, decisions[2] );
m_currStates[3].updateState<4>( scanInfo, m_prevStates, decisions[3] );
break;
default:
m_currStates[0].updateState<5>( scanInfo, m_prevStates, decisions[0] );
m_currStates[1].updateState<5>( scanInfo, m_prevStates, decisions[1] );
m_currStates[2].updateState<5>( scanInfo, m_prevStates, decisions[2] );
m_currStates[3].updateState<5>( scanInfo, m_prevStates, decisions[3] );
}
}
if( scanInfo.spt == SCAN_SOCSBB )
{
std::swap( m_prevStates, m_skipStates );
}
}
}