双目SLAM基础
双目slam基础 Stereo camera slam
Stereo Vision:Algorithms and Applications 双目宝典
Machine-learning-for-low-level-vision-problems 机器学习实现低层次视觉-深度估计等
室外数据集 Kitti
室内数据集 Middlebury 双目算法评估
嵌入式 图像滤波卷积计算 卷积的简化计算
双目 匹配 CRF平滑 后处理
针孔相机模型
0.基础知识 Basic Knowledge
相机内参数 Intrinsic parameters
内参数K 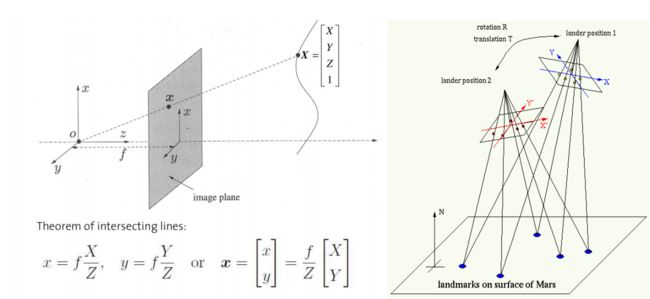
u x fx 0 cx
v = K * y = 0 fy cy
1 z 0 0 1
* 相机感光元件CCD的尺寸是8mm X 6mm,
帧画面的分辨率设置为640X480,
那么毫米与像素点之间的转换关系就是80pixel/mm 80像素每毫米
* CCD传感器每个像素点的物理大小为dx*dy,相应地,就有 dx=dy=1/80
* 假设像素点的大小为k x l,其中 fx = f / k, fy = f / (l * sinA),
fx = 80*焦距 fy = 80*焦距
焦距为相机光心到感光平面中心的距离
A一般假设为 90°,是指摄像头坐标系的偏斜度(就是镜头坐标和CCD是否垂直)。
* 摄像头矩阵(内参)的目的是把图像的点从图像坐标转换成实际物理的三维坐标。
因此其中的fx, fy, cx, cy 都是使用类似上面的纲量。
* 同样,Q 中的变量 f,cx, cy 也应该是一样的。
|Xw|
* |u| |fx 0 cx 0| | R T | |Yw|
* |v| = |0 fy cy 0| * | | * |Zw| = M * W
* |1| |0 0 1 0| | 0 0 0 1| |1 |
* 像素坐标齐次表示(3*1) = 内参数矩阵 齐次表示 3*4 × 外参数矩阵齐次表示 4*4 × 物体世界坐标 齐次表示 4*1
* 内参数齐次 × 外参数齐次 整合 得到 投影矩阵M 3*4
* 对于左右两个相机 投影矩阵 P1=M1 P2=M2
* 世界坐标 W ----> 左相机投影矩阵 P1 ------> 左相机像素点 (u1,v1,1)
* ----> 右相机投影矩阵 P2 ------> 右相机像素点 (u2,v2,1)
以下更加三角测量可以得到:
* Q为 视差转深度矩阵 disparity-to-depth mapping matrix
* Z = f*B/d = f /(d/B) B为相机基线长度 d为两匹配像素的视差
* X = Z*(x-cx)/fx = (x-c_x)/(d/B) 相似三角形
* Y = Z*(y-cy)/fy = (y-c_x)/(d/B)
X x
Y = Q * y
Z d
1 1
* Q= | 1 0 0 -c_x | Q03
* | 0 1 0 -c_y | Q13
* | 0 0 0 f | Q23
* | 0 0 -1/B (c_x-c_x')/B |
* Q32 Q33
c_x和c_x' 为左右相机 平面坐标中心的差值(内参数)
* 以左相机光心为世界坐标系原点 左手坐标系Z 垂直向后指向 相机平面
* |x| | x-cx | |X'|
* |y| | y-cy | |Y'|
* Q * |d| = | f | = |Z'| ====>归一化==> Z = Z/W = -f*B/(d-c_x+c_x')
* |1| |(-d+cx-cx')/B | |W |
* Z = f * B/ D f 焦距 量纲为像素点 B为双目基线距离
* 左右相机基线长度 量纲和标定时 所给标定板尺寸 相同
* D视差 量纲也为 像素点 分子分母约去,Z的量纲同 B
Q 示例:
[ 1., 0., 0., -3.3265590286254883e+02,
0., 1., 0., -2.3086411857604980e+02,
0., 0., 0., 3.9018919929094244e+02,
0., 0., 6.1428092115522364e-04, 0. ]
相机畸变参数 Extrinsic parameters
r^2 = x^2+y^2
* 径向畸变矫正 光学透镜特效 凸起 k1 k2 k3 三个参数确定
* Xp=Xd(1 + k1*r^2 + k2*r^4 + k3*r^6)
* Yp=Yd(1 + k1*r^2 + k2*r^4 + k3*r^6)
* 切向畸变矫正 装配误差 p1 p2 两个参数确定
* Xp=Xd + ( 2 * p1 * y + p2 * (r^2 +2 * x^2) )
* Yp=Yd + ( p1 * (r^2 + 2 * y^2) + 2 * p2 * x )
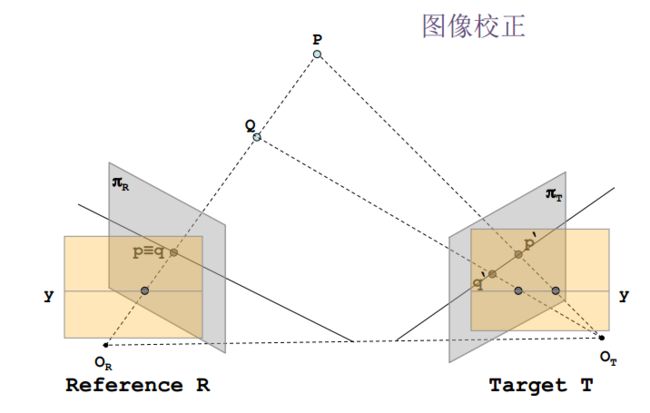
1. 双目相机校正Stereo Rectification
opencv双目校准 程序参考
相对位置矩阵:
R t 为 左相机到右相机 的 旋转与平移矩阵
R维度:3*3
t维度:3*1
t中第一个tx为 双目基线长度
摆正矩阵:
立体校正的时候需要两幅图像共面并且 行对准 以使得立体匹配更加的可靠
使得两幅图像共面的方法就是把两个摄像头的图像投影到一个 公共成像面上,
这样每幅图像从本图像平面投影到 公共图像平面都需要一个旋转矩阵R
stereoRectify 这个函数计算的就是从图像平面投影都公共成像平面的旋转矩阵Rl,Rr。
Rl,Rr即为左右相机平面行对准的校正旋转矩阵。
左相机经过Rl旋转,右相机经过Rr旋转之后,两幅图像就已经共面并且行对准了。
投影矩阵:
其中Pl,Pr为两个相机的投影矩阵,
其作用是将3D点的坐标转换到图像的2D点的坐标:
P*[X Y Z 1]' =[x y w]
重投影矩阵(视差转深度矩阵):
Q矩阵为重投影矩阵(视差转深度矩阵),
即矩阵Q可以把2维平面(图像平面)上的点投影到3维空间的点:
Q*[x y d 1] = [X Y Z W]。
其中d为左右两幅图像的视差.
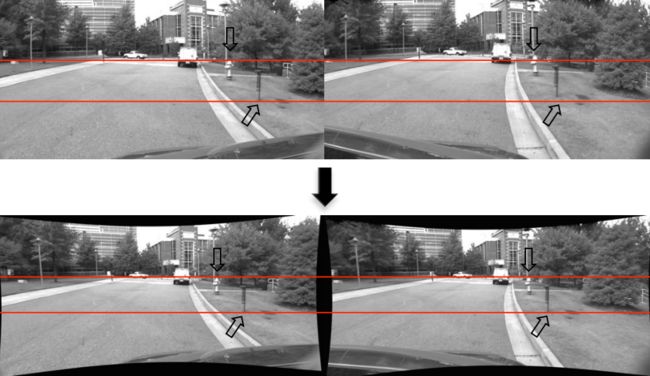
校准之后的效果
2. 特征提取 Feature Extraction
一个像素点进行匹配奇异性太大,所以需要对像素点计算特征之后,用像素点的特征来进行匹配
匹配之后可以得到视差,进而得到像素点的深度。
特征类型:
1. 手工提取的特征(Hand-crafted feature ):
a. 领域像素值信息:
直接使用领域块像素值
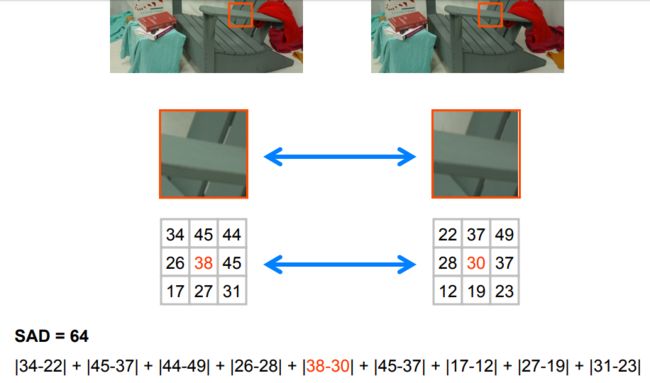
绝对值误差和SAD
误差平方和SSD
相关性NCC(Normalized Cross Correlation 与块均值相关)
STAD truncated absolute differences (TAD) 带最小阈值的 绝对值误差和
sum(min(asb(),thresh))
使用领域内像素相对信息 周围点相对于中心点像素值的大小关系
ORB特征 基于 Faster角点与BRIEF描述子。
Faster角点特征:
半径为R的圆周上的像素点的亮度值与中心点的大小关系,大了就为1,小了就为0。
BRIEF描述子:
邻域内随机选择n对像素点(p,q),比较其灰度值大小,如果I(p)>I(q),则令其对应的值为1,否则为0。
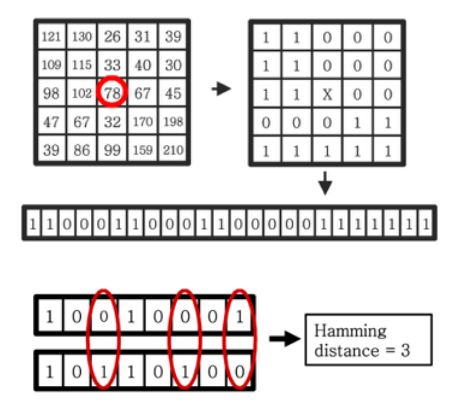
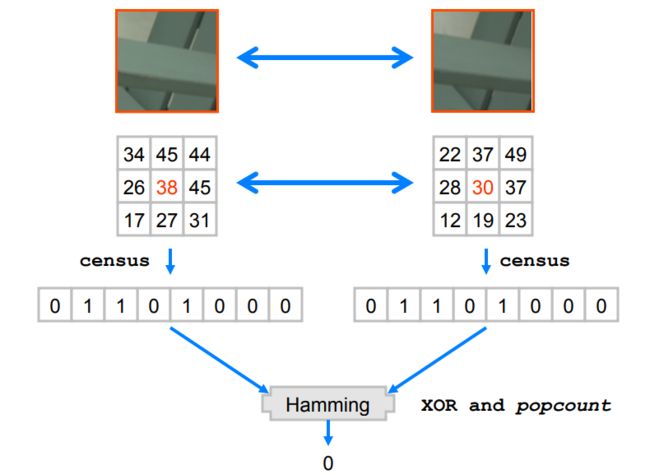
Census变换特征:
在指定窗口内比较周围亮度值与中心点的大小,大了就为1,小了就为0,
然后每个像素都对应一个二值编码序列,然后通过海明距离来表示两个像素的相似程度。
b. 领域像素梯度值信息:
SIFT 尺度不变特征变换 对像素点领域内 像素梯度方向使用灰度梯度赋值加权统计。
SURF 梯度的梯度信息 领域内使用赋值对方向加权统计。
2. 卷积网络提取的特征(Learnable feature from Conv-Nets):
输入 两张左右相机图像的图像块 到卷积网络(图片相似度判别网络Siamese network )内
网络先对图像块进行特征提取,然后进行特征匹配,得到匹配代价图
输出 matching cost匹配代价图
更加匹配代价图,选出合适的匹配点,再计算视差,得到深度。
网络形式在后面以图片形式放出。
Census计算代码
census计算示意图
相似性卷积网络1 卷积+全连接 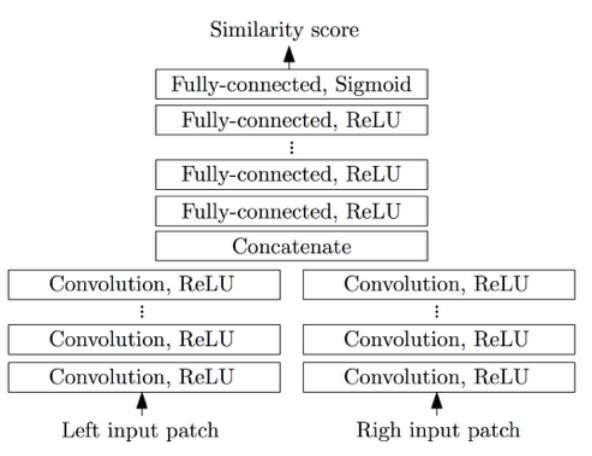
相似性卷积网络2 卷积+全连接
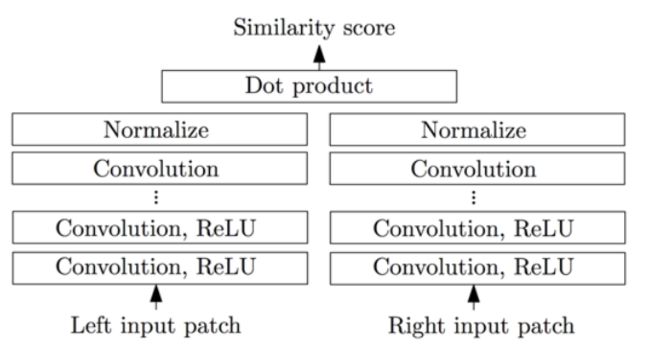
相似性卷积网络3 卷积+点乘ElementWise+全内容
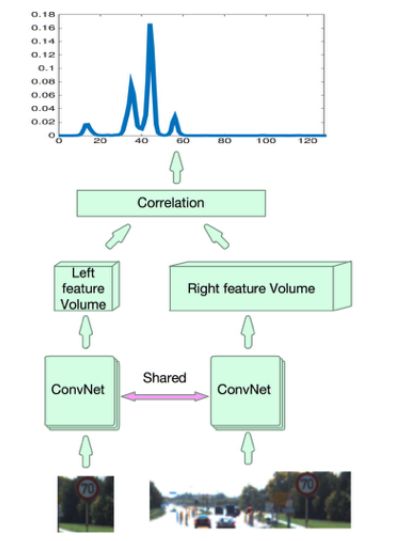
匹配误差cnn网络

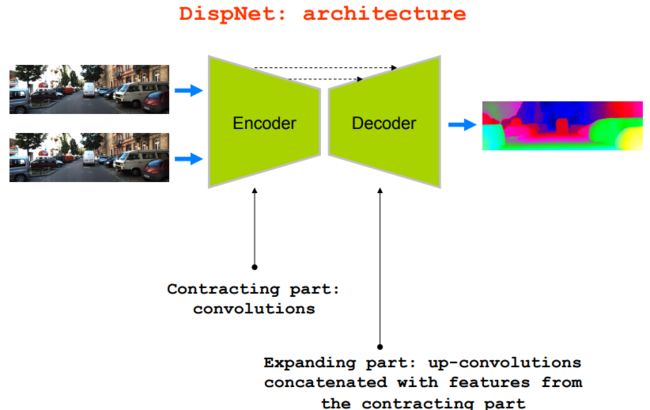
端到端直接输出深度cnn网络
3. 双目特征匹配 Stereo Feature Matching
0.计算代价之前一般会预处理 对图像滤波
可使用 均值滤波/双边滤波/Census transform/高斯滤波等
a. 在极线范围内使用上面的特征计算方法计算 匹配代价Matching cost computation
sad差绝对值和
censun领域相对关系
双目匹配 极线范围内快匹配搜索
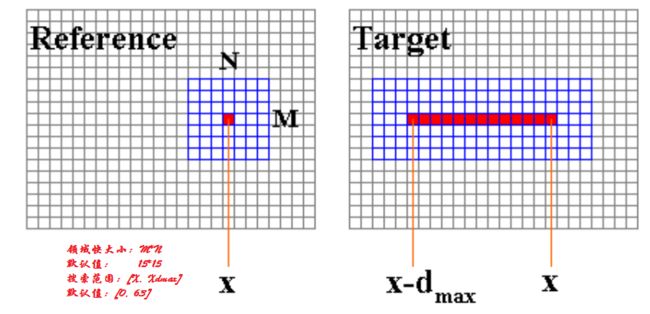
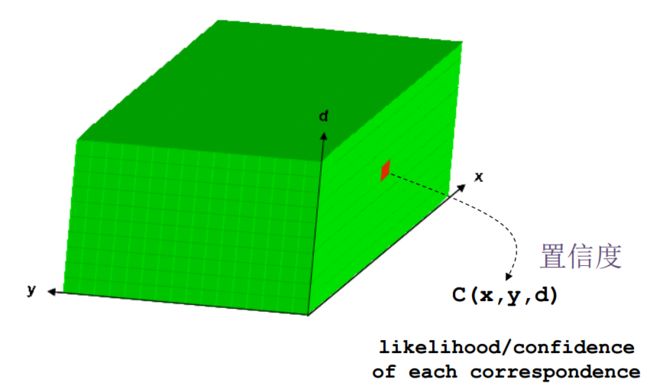
视差空间图像 Disparity Space Image (DSI) is a 3D matrix (WxHx(dmaxdmin)
b. 匹配代价聚合 Cost aggregation
场景内不同深度的代价不应该放在一起计算 可依据分割和像素值进行复权值 **多窗口 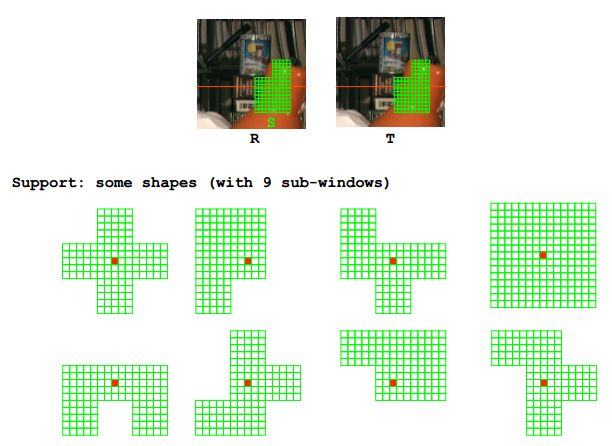 **图分割复权值
**图分割复权值 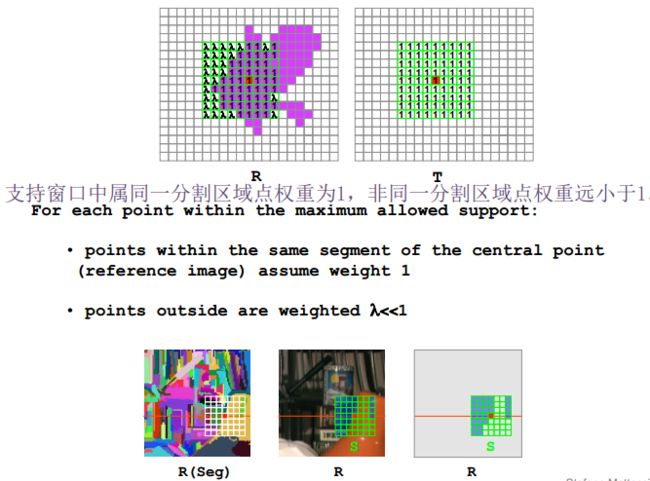
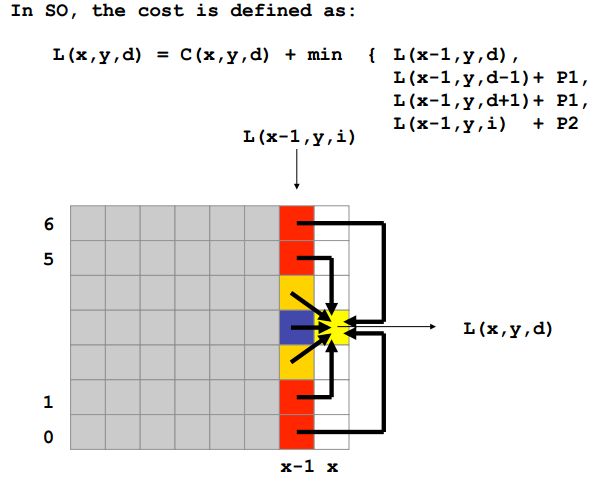
c. 视差计算&&优化 Disparity computation&&optimization
Scanline Optimization (SO) 线扫描优化
d. 视差细化调整 Disparity refinement 剔除外点
亚像素调整Sub-pixel interpolation
视差滤波
中值滤波
双边滤波
4. 三角测量得到深度 Triangulation
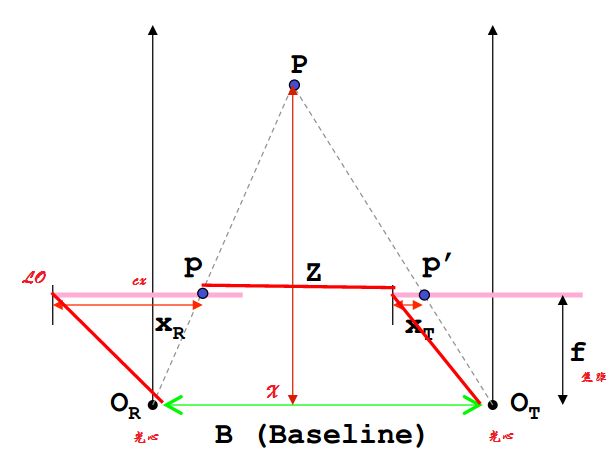
上图中,三角形 P OR OT 相似于 三角形 P p p'
更加相似三角形的对应边成比例定理:
OR OT/ PX = p p'/ PZ
换成长度:
B/Z = (B+Xt-Xr) / (Z - f)
B为基线长度值
Z为点P的深度值
f为相机焦距值
Xr,Xt 为两幅图的匹配点坐标,Xr-Xt 为匹配点视差d
化简可以得到:
Z = B*f/(Xr-Xt) = B*f/d
又有 三角形 OR cx p 相似于 三角形 P X OR
得到:
OR cx / p cx = P X / OR X
换成长度:
f/ (Xr - cx) = Z / X
得到 :
X = Z/f * (Xr - cx)
同理:
Y = Z/f * (Yr - cy)
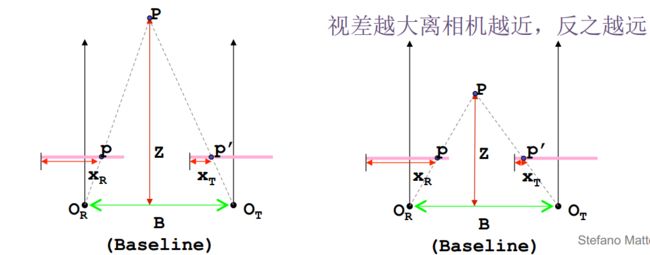
由于 Z = B*f/d,
视差与深度成反比
深度估计总结
1. 主动方法
a. 结构光 Structured light (Kinect1) (iPhone X 齐刘海原理) Inter RealSenes
光已知空间方向的投影光线的集合称为结构光,结构光激光散斑
通过投射具有高度伪随机性的激光散斑,会随着不同距离变换不同的图案,
对三维空间直接标记,通过观察物体表面的散斑图案就可以判断其深度。
b. ToF - Time of Flight飞行时间法 (Kinect2)
通过连续发射光脉冲(一般为不可见光)到被观测物体上,
然后接收从物体反射回去的光脉冲,
通过探测光脉冲的飞行(往返)时间来计算被测物体离相机的距离。
以上为RGBD传感器
c. LIDAR 激光雷达 (Velodyne)
结构光参考
飞行时间法
2.被动方法
a. 双目视觉
上面介绍的
b. 基于机器学习的单目 深度传感器 Monocular depth* sensors based on ML
需要先验知识
双目视觉博客参考
5. 相邻帧特征匹配 Temporal Feature Matching
使用双目 左右两幅图 立体匹配的到像素点对应的深度,进而得到3D点坐标
使用当前帧 和参考帧 (都使用左图) 匹配,恢复相机移动矩阵:
1、在当前帧图像和参考帧图像寻找匹配点对(特征点匹配,光流法)
2、计算变换矩阵的初始解
参考帧2d点对应的3d点和 当前帧 2d点组成 3d-2d 匹配点对,使用PnP求解算法得到初始解
或者使用 2d-2d变换求解算法(单应变换/本质矩阵)
3、鲁棒优化位置矩阵
使用RanSaC随机采样序列一致性算法,随机采样一些点对求解,计算剩余点对的误差,统计好的点的数量,选择内点数量多的变换关系
或者使用最小二乘优化算法优化位置矩阵,使用误差加权的列文伯格马尔夸克算法W-LM更新位姿。
匹配点对计算方法,常见的有如下两种方式:
1. 计算特征点,然后计算特征描述子,通过描述子来进行匹配,优点准确度高,缺点是描述子计算量大。
2. 光流法:在第一幅图中检测特征点,使用光流法(Lucas Kanade method)对这些特征点进行跟踪,
得到这些特征点在第二幅图像中的位置,得到的位置可能和真实特征点所对应的位置有偏差。
所以通常的做法是对第二幅图也检测特征点,如果检测到的特征点位置和光流法预测的位置靠近,
那就认为这个特征点和第一幅图中的对应。
在相邻时刻光照条件几乎不变的条件下(特别是单目slam的情形),
光流法匹配是个不错的选择,它不需要计算特征描述子,计算量更小。
光流计算
光流场景流
光流计算
假设1:光照亮度恒定:
I(x, y, t) = I(x+dx, y+dy, t+dt)
泰勒展开:
I(x+dx, y+dy, t+dt) =
I(x, y, t) + dI/dx * dx + dI/dy * dy + dI/dt * dt
= I(x, y, t) + Ix * dx + Iy * dy + It * dt
得到:
Ix * dx + Iy * dy + It * dt = 0
因为 像素水平方向的运动速度 u=dx/dt, 像素垂直方向的运动速度 v=dy/dt
等式两边同时除以 dt ,得到:
Ix * dx/dt + Iy * dy/dt + It = 0
Ix * u + Iy * v + It = 0
写成矩阵形式:
[Ix, Iy] * [u; v] = -It, 式中Ix, Iy为图像空间像素差值(梯度), It 为时间维度,像素差值
假设2:局部区域 运动相同
对于点[x,y]附近的点[x1,y1] [x2,y2] , ... , [xn,yn] 都具有相同的速度 [u; v]
有:
[Ix1, Iy1; [It1
Ix2, Iy2; It2
... * [u; v] = - ...
Ixn, Iyn;] Itn]
写成矩阵形式:
A * U = b
由两边同时左乘 A逆 得到:
U = A逆 * b
由于A矩阵的逆矩阵可能不存在,可以曲线救国改求其伪逆矩阵
U = (A转置*A)逆 * A转置 * b
得到像素的水平和垂直方向速度以后,可以得到:
速度幅值:
V = sqrt(u^2 + v^2)
速度方向:Cet = arctan(v/u)
6. 姿态恢复/跟踪/随机采样序列 Incremental Pose Recovery/RANSAC

计算变换矩阵的初始解:
1、(单应变换/本质矩阵)求初始解
2d-2d变换求解算法(单应变换/本质矩阵) 单目里面有说过
2、3d-2d 匹配点对,使用PnP算法/直接线性变换DLT(6个 3D - 2D 点对) 得到初始解:
a) 直接线性变换DLT:
2D点-3D点对
2d点通过内参数K 反变换到 归一化平面
(u,v,1)
3d点其次表示 (X, Y, Z, 1)
变换矩阵: T = [R t; 0 0 0 1] 维度 3*4
s1为归一化尺度
s1 * (u,v,1) = T * (X, Y, Z, 1) = T * P
T = [t1 t2 t3 t4;
t5 t6 t7 t8;
t9 t10 t11 t12] = [T1;
T2;
T3]
可得到 u = T1 × P/(T3 * P)
v = T2 × P/(T3 * P)
移项可以得到:
T3 * P *u - T1 * P =0 以及
T3 * P *v - T2 * P =0
每个3D - 2D 点对 可提供 两个约束
T有 12个变量 至少需要6个 3D - 2D 点对
求解的 T的 左大半部分左上角3*3
不一定满足旋转矩阵R的约束关系(正交矩阵),
得到 T后需要使用QR分解 使得得到的 T 满足 SE3
用一个旋转矩阵去近似(将3*3矩阵空间投影到SE(3)流形上)
上面也叫P6P
b) PnP算法(P3P),3点平面匹配:
世界坐标系下的ABC三点和图像坐标系下的abc三点匹配;
其中AB,BC,AC的长度已知,,,也是已知,
通过相似三角形余弦定理可以求出A,B,C在相机参考系中的3d坐标;
原来就知道A, B, C 三点在世界坐标系下的坐标,现在有知道它们在相机坐标系下的坐标,
进而可以转换成 3D-3D 点的匹配问题,使用 ICP算法求解
3、3d-3d 匹配点对,使用ICP算法得到初始解:
ICP算法求解
ICP:3D-3D点对求解变换矩阵
使得 P2 = R* P1 + t
线性代数求解 SVD奇异值分解方法
求解 R,t 使得误差 ei = P2 - (R*P1 + t)
利用最小二乘法求解最优解使:
最小化误差和 min (1/n * sum(ei^2)) ;
e^2 = ei*ei转置
得到 R t
先对平移向量T进行初始的估算,
1) 具体方法是分别得到点集P1和P2的中心:
p1 = 1/n * sum(P1)
p2 = 1/n * sum(P2)
2) 分别将点集P1和P2平移至中心点处:
P1' = P1 - p1
P2' = P2 - p2
3) 误差变为: ei' = (P2'+p2) - (R*(P1'+p1) + t)
ei^2 = (P1'- R*P2')^2 + (p2 - R*p1 - t)^2
4) 求 (P1'- R*P2')^2最小 可以得到R
(P1' - R * P2')^2 =
P1'转置*P1' - 2*P1'转置*R*P2' + P2'转置*R转置*R*P2'
第一项与R无关 第三项 应为 R转置* R = I 与R也无关
只剩下第二项 - 2*P1'转置*R*P2'
我们计算 B = P1'转置*P2'
原最优化问题可以转为求B的最小特征值和特征向量
对B进行奇异值分解得到:
B = U * 对角矩阵 * V转置
R= U * V转置
5) 再求取转移矩阵t
由 P2 = R* P1 + t
得到 t = P2 - R* P1
鲁棒优化:
1、 使用RANSAC随机采样序列一致性算法
随机采样一些点对求解,计算剩余点对的误差,统计好的点的数量,选择内点数量多的变换关系
2、最小二乘优化算法优化位置矩阵,使用误差加权的列文伯格马尔夸克算法W-LM更新位姿
3D-2D点对匹配,最小化误差,求取误差函数对优化变量的偏导数,对优化变量进行更新
三维点 Pi = (Xi, Yi, Zi) 相机坐标 pi = (xi, yi, 1) 像素坐标 ci = (ui, vi)
* 相机相对于 世界坐标系(第一帧图像相机) 的 旋转 平移矩阵 R t (变换矩阵 T =[R t]) 的 李代数形式 f 李群形式为 exp(f)
* si * [ui,vi,1] = K * T * Pi = K * exp(f) * Pi 这里 exp(f) * Pi 为 4*1维的需要为齐次表示 需要转换为 非齐次表示
* 重投影误差 e = sum( [ ci 1 ] - 1/si * K * exp(f) * Pi )^2 ; K * exp(f) * Pi 为三维点的重投影坐标
* 最小化重投影误差 得到 变换矩阵李代数形式 f
* 由于 [ ci 1 ] 最后一个为1 误差约束e 为两个方程 而 f 为6个自由度 x1 x2 x3 x4 x5 x6
* 最小二乘优化 用于最小化一个函数 e(x + ∇x) = e(x) + J * ∇x
* 所以 雅克比矩阵 J 为 2*6的矩阵
*
* 雅克比J的推导:
* si * [ ci 1 ] = K * T * Pi = K * exp(f) * Pi = K * Pi' Pi'为相机坐标系下的坐标 exp(f) * Pi 前三维 (Xi', Yi', Zi')
* s*u [fx 0 cx X'
* s*v = 0 fy cy * Y'
* s 0 0 1] Z'
* 利用第三行消去s(实际上就是 P'的深度)
* u = fx * X'/Z' + cx
* v = fy * Y'/Z' + cy
*
* [1]
* 我们对 变换矩阵 T的 李代数形式 f 左乘 扰动量 ∇f
e = [ ci 1 ] - 1/si * K * exp(f) * Pi = [ ci 1 ] - 1/si * K * Pi'
* 误差e 对∇f的偏导数 = e 对P'的偏导数 * P'对∇f的偏导数
*
* e 对P'的偏导数 = - [ u对X'的偏导数 u对Y'的偏导数 u对Z'的偏导数;
* v对X'的偏导数 v对Y'的偏导数 v对Z'的偏导数] = - [ fx/Z' 0 -fx * X'/Z' ^2
* 0 fy/Z' -fy* Y'/Z' ^2]
* P'对∇f的偏导数 = [ I -P'叉乘矩阵] 3*6大小 平移在前 旋转在后
* = [ 1 0 0 0 Z' -Y'
* 0 1 0 -Z' 0 X'
* 0 0 1 Y' -X 0]
* 有向量 t = [ a1 a2 a3] 其
* 叉乘矩阵 = [0 -a3 a2;
* a3 0 -a1;
* -a2 a1 0 ]
*
* 两者相乘得到 平移在前 旋转在后
* J = - [fx/Z' 0 -fx * X'/Z'^2 -fx * X'*Y'/Z' ^2 fx + fx * X'^2/Z'^2 -fx*Y'/Z'
* 0 fy/Z' -fy* Y'/Z'^2 -fy -fy* Y'^2/Z'^2 fy * X'*Y'/Z'^2 fy*X'/Z' ]
* 如果是 旋转在前 平移在后 调换前三列 后三列
// 旋转在前 平移在后 g2o
* J = [ fx *X'*Y'/Z'^2 -fx *(1 + X'^2/Z'^2) fx*Y'/Z' -fx/Z' 0 fx * X'/Z'^2
* fy *(1 + Y'^2/Z'^2) -fy * X'*Y'/Z'^2 -fy*X'/Z' 0 -fy/Z' fy* Y'/Z'^2 ]
* [2] 优化变量为3D点坐标时Pi
e = [ ci 1 ] - 1/si * K * exp(f) * Pi = [ ci 1 ] - 1/si * K * Pi'
* e 对Pi的偏导数 = e 对Pi'的偏导数 * Pi'对Pi的偏导数 = e 对P'的偏导数 * R
* P' = R * P + t
* P'对P的偏导数 = R
J = e 对P'的偏导数 * R
= - [ fx/Z' 0 -fx * X'/Z' ^2 * R
0 fy/Z' -fy* Y'/Z' ^2]
3. 3D-3D 非线性最小二乘优化
* ei = Pi - exp(f) * Pi' = P - P‘ 李代数形式 的 变换矩阵 对误差求导 得到 迭代优化 梯度
* 误差有三维,而优化变量R,t,对应的李代数有6个变量
* 所有误差对变量的偏导数雅克比矩阵 维度为 3×6 误差 对应的导数来优化变量,更新的增量
* e 对 ∇f的导数 = P'对∇f的偏导数
* P'对∇f的偏导数 = [ I -P'叉乘矩阵] 3*6大小 平移在前 旋转在后
* = [ 1 0 0 0 Z' -Y'
* 0 1 0 -Z' 0 X'
* 0 0 1 Y' -X 0]
* 旋转在前 平移在后
* = [ 0 Z' -Y' 1 0 0
* -Z' 0 X' 0 1 0
* Y' -X 0 0 0 1]
*
* J = - P'对∇f的偏导数
* = [ 0 -Z' Y' -1 0 0
* Z' 0 -X' 0 -1 0
* -Y' X’ 0 0 0 -1]