- 【OpenGL ES】绘制正方形
LittleFatSheep
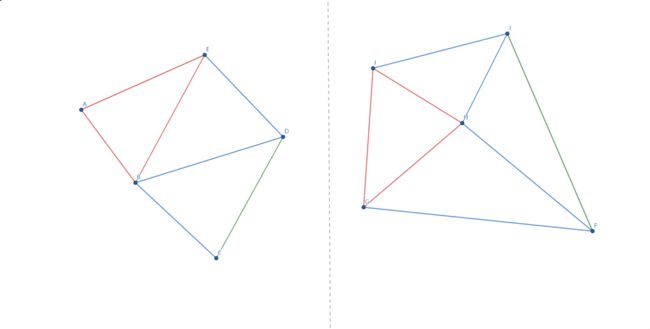
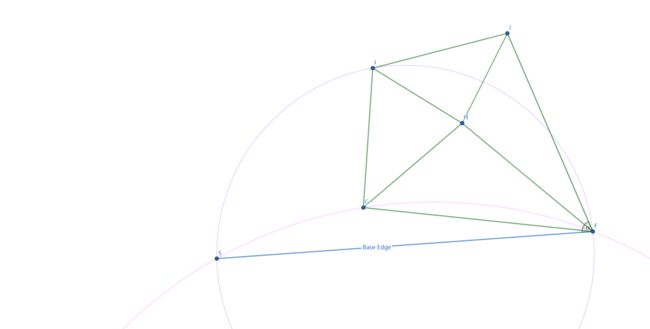
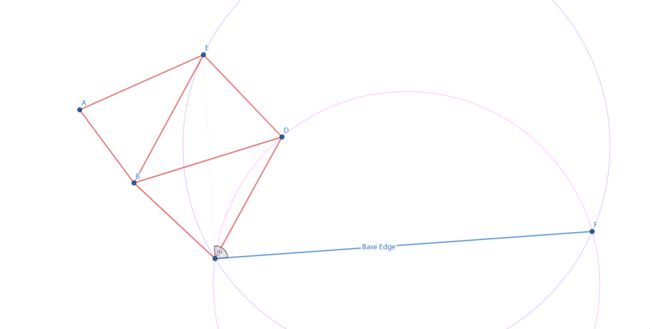
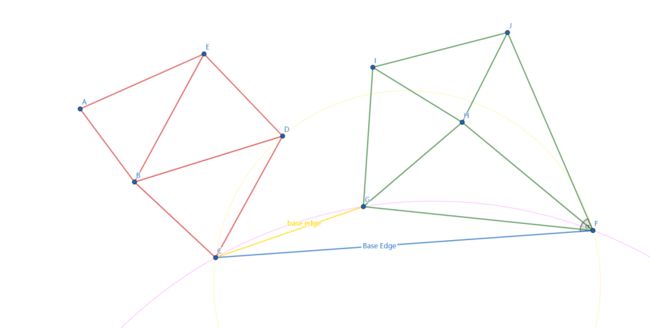
1前言【OpenGLES】绘制三角形中介绍了绘制三角形的方法,本文将介绍绘制正方形的方法。OpenGL以点、线段、三角形为图元,没有提供绘制正方形内部的接口。要绘制正方形内部,必须通过三角形拼接而成,如下图,是通过GL_TRIANGLE_FAN模式绘制正方形。img绘制的坐标点如下,由于此坐标是以画布中心为坐标原点,水平向右为x轴正方向,竖直向上为y轴正方向,其值是相对画布宽度和高度的比值。一般而
- 437陪女儿走过高中三年55
南雁51
12.29星期三晴在办公室里听到刘老师说:女儿们的高中学校也会放元旦假的。着可是个喜讯,我急着想告诉女儿。算着五点过十分,女儿们放学吃晚饭的时候,我就一直等着女儿给我打电话,等到快要失望的时候,女儿打来了电话。我抢先告诉她这个消息,让她有点小失落,本来她也是要告诉我这个好消息的。她说,她们星期一的时候就知道了,有些老师说给她们布置的是元旦假期的作业。我告诉她,到时候我会等着她一起回家。说了几句后,
- JavaScript 性能优化实战指南
JavaScript性能优化实战指南一、引言JavaScript是一种广泛使用的编程语言,尤其在前端开发中占据重要地位。随着Web应用的复杂度不断增加,性能优化成为开发过程中不可或缺的一部分。性能优化不仅可以提升用户体验,还能减少服务器负载,提高应用的响应速度。本文将从多个方面详细探讨JavaScript性能优化的实战技巧,包括代码优化、内存管理、异步编程、资源加载优化等,旨在为开发者提供一份全面
- HUELOJ:123 删除元素
题目描述输入一个递增有序的整型数组A有n个元素,删除下标为i的元素,使其仍保持连续有序。注意,有效下标从0开始。定义如下两个函数分别实现删除元素操作和数组输出操作。voiddel(inta[],intn,inti);/删除数组a中下标为i的元素/voidPrintArr(inta[],intn);/输出数组a的前n个元素/输入描述输入分三行,第一行是一个整数n(n=0。输出描述输出删除下标为i的元
- 0524-2019理财小知识@
星月传奇1998
欢迎大家继续学习基金投资的课程。基金投资是咱们理财同心圆和亿万金三角两个路径的共同必修课。先声明一下,我们课程中所提到的基金,都是指理财基金。换句话说,不管你的资产金额是100块钱还是100个亿,基金尤其是指数基金都是你必不可少的投资方式。Part1:基金的初步认知你还别觉得我在说大话,我们先简单的介绍一下,到底什么是基金?做一个形象的比喻,基金其实就是一个篮子,按照预定设好的规则,我们把各个资产
- 读书笔记之 瑞达利欧《原则》
niuDavid
桥水创始人瑞·达利欧写的《原则》一书,厚厚的竟达五百多页,我也是花费很长时间读完。《原则》主体架构无非分为三个部分,首先是写自己的历程,夹杂一些自己感悟作为本书的引子,第二部分是讲到归纳的生活原则,最后一部分就讲了工作中的原则。书中归纳点很多,虽然有些是我们早已体察到的,但仍有部分观点新鲜可敬,有些理论是深刻的,有些观点是让人触动不已,有些竟是即相通而又交叉验证的,这些都通过此书系统的给我们展显出
- Qualcomm Linux 蓝牙指南学习--概述
专业开发者
蓝牙linux学习运维
前言QualcommTechnologies推出的Linux蓝牙指南详细介绍了基于QualcommRB3Gen2和IQ-9100Beta开发套件的蓝牙解决方案。该文档涵盖BlueZ和Fluoride协议栈的功能验证流程,支持蓝牙5.2核心规范,包括WCN6750/WCN6856/QCA6698AQ芯片组的特性。主要内容分为三部分:1.功能架构支持GAP、SPP、A2DP等10种蓝牙Profil
- Qualcomm Linux 蓝牙指南学习--入门指南
专业开发者
蓝牙linux学习运维
前言QualcommTechnologies推出的Linux蓝牙指南详细介绍了基于QualcommRB3Gen2和IQ-9100Beta开发套件的蓝牙解决方案。该文档涵盖BlueZ和Fluoride协议栈的功能验证流程,支持蓝牙5.2核心规范,包括WCN6750/WCN6856/QCA6698AQ芯片组的特性。主要内容分为三部分:1.功能架构支持GAP、SPP、A2DP等10种蓝牙Profil
- 2019-01-23
Hank_dec5
2019-01-23姓名:符振华(378期反省三组)公司:深圳蔚蓝时代商业管理有限公司-上海第一分公司【日精进打卡第234天】【知~学习】诵读《六项精进》1遍,254遍;诵读《大学》开篇1遍,259遍【经典名句分享】一万年太久,只争朝夕【行~实践】一、修身运动两小时二、建功:1、日常工作{积善}:许愿日行一善/行善1件,时间为234天;累计243件1.感谢家人无私的爱2.感谢遇到的每一个挫折3.感
- python大数据论文_大数据环境下基于python的网络爬虫技术
weixin_39775976
python大数据论文
软件开发大数据环境下基于python的网络爬虫技术作者/谢克武,重庆工商大学派斯学院软件工程学院摘要:随着互联网的发展壮大,网络数据呈爆炸式增长,传统捜索引擎已经不能满足人们对所需求数据的获取的需求,作为搜索引擎的抓取数据的重要组成部分,网络爬虫的作用十分重要,本文首先介绍了在大数据环境下网络爬虫的重要性,接着介绍了网络爬虫的概念,工作原理,工作流程,网页爬行策略,python在编写爬虫领域的优势
- C#-Linq源码解析之Concat
黑哥聊dotNet
DotNet-Linq详解linqc#
前言在Dotnet开发过程中,Concat作为IEnumerable的扩展方法,十分常用。本文对Concat方法的关键源码进行简要分析,以方便大家日后更好的使用该方法。使用Concat连接两个序列。假如我们有这样的两个集合,我们需要把两个集合进行连接!List lst = new List { "张三", "李四" };List lst2 = new List { "王麻子" };不使用Linq大
- C# Linq源码解析之Aggregate
黑哥聊dotNet
DotNet-Linq详解c#linqlist
前言在Dotnet开发过程中,Aggregate作为IEnumerable的扩展方法,十分常用。本文对Aggregate方法的关键源码进行简要分析,以方便大家日后更好的使用该方法。使用Aggregate是对序列应用累加器的函数。看下面一段代码:List lst = new List() { "张三", "李四", "王麻子" };给了我们这样的一个list集合,我们想要得到"张三哈哈哈李四哈哈哈王
- 一夜爆红的AI革命:Manus如何定义“智能体”新纪元?
莫非技术栈
人工智能
一夜爆红的AI革命:Manus如何定义“智能体”新纪元?——技术突破、资本狂欢与未来挑战全解析一、技术革新:从“对话助手”到“行动代理”的质变Manus的爆火并非偶然,其核心技术架构突破了传统AI工具的边界,重新定义了人机协作模式:多智能体协同框架Manus采用动态调度系统,据其技术白皮书显示,系统可调用多领域专业模型(官方未公布具体模型名称),通过实时评估模型响应速度、准确率、成本等指标,自动分
- 【LeetCode 3136. 有效单词】解析
目录LeetCode中国站原文原始题目题目描述示例1:示例2:示例3:提示:讲解化繁为简:如何优雅地“盘”逻辑判断题第一部分:算法思想——“清单核对”与“一票否决”第二部分:代码实现——清晰的逻辑翻译实现一:常规判断逻辑实现二:使用正则表达式(一行代码的“炫技”)第三部分:总结LeetCode中国站原文https://leetcode.cn/problems/valid-word/原始题目题目描述
- 2025年GESP3月认证C++六级真题解析
信奥源老师
GESP等级考试C++真题解析c++算法信奥赛数据结构GESP
单选题(每题2分,共30分)第1题在面向对象编程中,类是一种重要的概念。下面关于类的描述中,不正确的是()。A.类是一个抽象的概念,用于描述具有相同属性和行为的对象集合。B.类可以包含属性和方法,属性用于描述对象的状态,方法用于描述对象的行为。C.类可以被实例化,生成具体的对象。D.类一旦定义后,其属性和方法不能被修改或扩展。答案:D解析:类定义后,可以通过继承、组合等方式进行扩展,也可以在一定程
- 级别的认识及定义
无缠01
本吾自学缠论以来最搞不懂的就是级别,级别先是分单根K线、K线包容关系、分型、笔、线段、中枢、走势类型(为了区分叫结构级别)。之后又说了级别可分为1min、5min、15min、30min、60min、日、周、月、季、年(叫周期级别)。之后的背驰的判别就只是后面的时间周期了。不过缠论中也有解释这两者级别的区别。真正的级别是单根K线、K线包容关系、分型、笔、线段、中枢、走势类型。而时间周期只是不同级别
- 法国诺曼底疫情指数超警戒线!网红专家神预测有无第2波疫情
法国话事姐
近日,德国威斯特法伦地区肉类联合加工厂Tönnies爆发集中感染事件。目前已接受新冠病毒检测的1160名员工中,约有730人检测结果呈阳性,感染比例高达三分之二!英国威尔士一处鸡肉加工厂18日也出现聚集性疫情,已有近百人确诊感染。不仅如此,法国诺曼底地区疫情也出现了反复。这一系列事件引发不少“第二波疫情”是否来临的担忧。法国是不是有点太松懈?法国卫生部门6月19日发布统计数据称,自5月启动“解封”
- 2024年09月CCF-GESP编程能力等级认证C++编程四级真题解析
码农StayUp
c++CCFGESP编程能力等级认证
本文收录于专栏《C++等级认证CCF-GESP真题解析》,专栏总目录:点这里。订阅后可阅读专栏内所有文章。一、单选题(每题2分,共30分)第1题在C++中,()正确定义了一个返回整数值并接受两个整数参数的函数。A.intadd(inta,intb){returna+b;}B.voidadd(inta,intb){returna+b;}C.intadd(a,b){returna+b;}D.voida
- 葱油桃酥饼
清凌凌的遂
葱油桃酥饼:材料:鸡蛋一个,猪油250克,低筋粉500克,葱160克,糖60克,盐10克,泡打粉5克,食用小苏打5克。步骤:1,先将鸡蛋、糖和猪油2分钟速度3打发。2,加入低筋粉、盐和葱速度1到6混合一分钟。3:取出面团稍微揉一下分成30克左右的剂子,搓圆然后压成圆形,然后用拇指按压中心位置形成一个小圆坑即可。4:烤箱200度12分钟图片发自App
- 【实操】信息安全工程师系列-第22关 网站安全需求分析与安全保护工程
披荆斩棘的GG
安全
【实操】信息安全工程师系列-第22关网站安全需求分析与安全保护工程********永远不要信任用户输入。—安全编程格言一、网站安全基础概念与威胁分(一)核心定义**网站安全目标:**保障机密性(数据不泄露)、完整性(数据不被篡改)、可用性(服务不中断)和可控性(管理可控制)。**技术架构:**基于B/S架构,涉及网络通信、操作系统、数据库、Web服务器(如Apache、IIS)、Web应用及相关协
- 参加网络学习收获心得
临江253王馨卉
在七月份以及八月初的几次培训中,我分别接触了不同种类的教育媒介以及教学工具,刷新了我的教学观念。在此我想简单的对几次学习做一个分享。第一部分结合梁校长的讲解,首先刷新了我对PPT应用于教学过程中的认知,以前只觉得这就是代替板书的一种工具,简单明了就行,但是现在认识到设计一个PPT要注意到情境创设,化抽象为直观以及它交互练习的特别作用。根据单页PPT设计的要求,我对字体大小,多少以及颜色都进行了调整
- 长沙周边游-武大户部巷长江轮渡两天两夜周边游全攻略!
有谱猫
交通长沙和武汉之间的交通主要以火车和高铁为主,并且都十分方便。每小时6趟车不怕你没得选择,单程票的费用是火车46.5,高铁165.5。看你自己的选择,去程火车来程高铁也可以,我选择去程来程都是高铁,虽然贵了一点,但是不累,很舒适。不累的旅程可以让你有更多的精力去旅行,因为旅行本身真的是一件非常累人的事。住宿我们住在光谷广场的德国风情街,价格适中,地铁和公交也比较方便。我们之前原计划是住民宿,但是民
- 今生今世,欠你一个对不起!古风句子
世界十大杰出青年
恨难写,人难懂,江湖几人风,画笔凄凉,往事断续,只是往来错,恩怨懂,南桥人,错把佳期看,一折煞,崎岖命运,坎坷东,人间泪,三分真,恩怨同,画笔冷,一世温柔,只是相思刻骨,错问佳期几人,懂得分寸。爱恨难,人间泪,三杯真,情眼看,花开落,往事凋零,一分真,一分情,眼里无风,内心渴望,一世清风错,从此佳期误,对等人,相思错,情眼看,花开落,风不及人,情不及缘,错问三世恩,缘三分,人三分。杯酒趁年华,风月
- 1 《王者速读法》读后感
书山有路是为勤
检视阅读打破了一些传统观点,如1人与书的关系;书是人类最忠实的仆人,朕只有三十分钟2如何在30分钟内阅读一本书的方法论3学习输出:高效输入,高效输出,良性循环结论:值的精读分析阅读
- 刘洺松成长记17
向着太阳歌唱啦啦啦
刘洺松今天105天啦!上午,妈妈带你去医院测评了,医生阿姨为你做了各项评估,测试得分为94分,正常。是不是所有妈妈都认为自己的孩子是超人呢?在妈妈心中,你就是superboy.永远是superboy.刘洺松健康快乐长大,爸爸妈妈爱你!
- 前后端分离场景下的用户登录玩法&Sa-token框架使用
两种方案的token、用户登录信息都存储在redis中!!方案一该方案是前端把token和token有效期一起加密存储到浏览器的localStorage中,每次请求时调用前端的getTokenIsExpiry()获取token并检查token是否过期,过期则remove并跳转登录页,这样前端有个问题就是前端也要知道token的有效期,需要和后端的token有效期保持一致,而后端则提供两个拦截器,分
- 洛谷二分查找题目详解
方俊涵
算法c++数据结构
B3881[信息与未来2015]拴奶牛题目描述有n头奶牛,有k个木桩,每个木桩有一个位置,一个木桩上只能拴一头奶牛。由于奶牛好斗,所以在拴奶牛的时候,要求距离最近的奶牛的距离尽可能大。例如n=4,k=6,木桩的位置为0,3,4,7,8,9,此时为下图。OllOOllOOO034789有许多种拴牛方案,例如:0,3,4,9:此时最近距离为1(3,4之间);0,3,7,9:此时最近距离为2。输入格式三
- 教育之旅(175)
张宝花
昨天大宝在家宅了一天,玩游戏、学习、练太极、做家务,大宝每天帮妈妈洗碗、做饭,锻炼大宝的劳动能力,二宝昨天考了一天试,理综210多,英语近90分,总分近500分了,考完试二宝累极了,直喊头疼,超负荷的脑力劳动,晚上又说今天晚上要网上补英语,支持二宝,二宝昨天晚上又学习了几个小时,真的一天很辛苦。我们仨吃了两顿幸福的团圆饭,早上蒸土豆丝,下午扯面,吃得我们仨喜气洋洋。二宝这段时间网课上得很认真,学习
- 【启航班航海日志】 1今天阅读《草房子》10万字
0e2ea6c34a3f
2这两天上课的时候,不是上英语就是上数学语文,很混乱,数学一般的写卷子,语文就是读一些课文和默写词语,英语就更简单了,背背背读一读就完了。3,每次我们都要午休,午休的时候老师给我们开空调,温度很低,22度,我们都要盖被子,起床的时候就是直接吃饭,每次吃饭的时候都很挤,都要往边上挪一挪,才能坐下,那个班里有好多人,所以都要挪一挪分两桌才可以坐下,有一部分中午就回家了,可是还有一大部分在那里睡觉,宿舍
- 请不要悲伤和着急
稻希
来深圳的这几天,我一直处在一种焦虑的着急的状态下,像只无头苍蝇一样到处乱窜。以至于为了生活而降低了对工作的要求,还好,最后还是守住了自己的初心。我相信很多人和我一样,会因为长时间的焦虑不安去降低自己的要求,去妥协很多东西。然而经历是人生的一部分,如果现在就妥协了,那么以后会有更多的事情让我们妥协,从而一步步走向碌碌无为的人生轨迹中去。每个人选择的方向不同,平平淡淡也好,轰轰烈烈也罢,都是自己的选择
- 如何用ruby来写hadoop的mapreduce并生成jar包
wudixiaotie
mapreduce
ruby来写hadoop的mapreduce,我用的方法是rubydoop。怎么配置环境呢:
1.安装rvm:
不说了 网上有
2.安装ruby:
由于我以前是做ruby的,所以习惯性的先安装了ruby,起码调试起来比jruby快多了。
3.安装jruby:
rvm install jruby然后等待安
- java编程思想 -- 访问控制权限
百合不是茶
java访问控制权限单例模式
访问权限是java中一个比较中要的知识点,它规定者什么方法可以访问,什么不可以访问
一:包访问权限;
自定义包:
package com.wj.control;
//包
public class Demo {
//定义一个无参的方法
public void DemoPackage(){
System.out.println("调用
- [生物与医学]请审慎食用小龙虾
comsci
生物
现在的餐馆里面出售的小龙虾,有一些是在野外捕捉的,这些小龙虾身体里面可能带有某些病毒和细菌,人食用以后可能会导致一些疾病,严重的甚至会死亡.....
所以,参加聚餐的时候,最好不要点小龙虾...就吃养殖的猪肉,牛肉,羊肉和鱼,等动物蛋白质
- org.apache.jasper.JasperException: Unable to compile class for JSP:
商人shang
maven2.2jdk1.8
环境: jdk1.8 maven tomcat7-maven-plugin 2.0
原因: tomcat7-maven-plugin 2.0 不知吃 jdk 1.8,换成 tomcat7-maven-plugin 2.2就行,即
<plugin>
- 你的垃圾你处理掉了吗?GC
oloz
GC
前序:本人菜鸟,此文研究学习来自网络,各位牛牛多指教
1.垃圾收集算法的核心思想
Java语言建立了垃圾收集机制,用以跟踪正在使用的对象和发现并回收不再使用(引用)的对象。该机制可以有效防范动态内存分配中可能发生的两个危险:因内存垃圾过多而引发的内存耗尽,以及不恰当的内存释放所造成的内存非法引用。
垃圾收集算法的核心思想是:对虚拟机可用内存空间,即堆空间中的对象进行识别
- shiro 和 SESSSION
杨白白
shiro
shiro 在web项目里默认使用的是web容器提供的session,也就是说shiro使用的session是web容器产生的,并不是自己产生的,在用于非web环境时可用其他来源代替。在web工程启动的时候它就和容器绑定在了一起,这是通过web.xml里面的shiroFilter实现的。通过session.getSession()方法会在浏览器cokkice产生JESSIONID,当关闭浏览器,此
- 移动互联网终端 淘宝客如何实现盈利
小桔子
移動客戶端淘客淘寶App
2012年淘宝联盟平台为站长和淘宝客带来的分成收入突破30亿元,同比增长100%。而来自移动端的分成达1亿元,其中美丽说、蘑菇街、果库、口袋购物等App运营商分成近5000万元。 可以看出,虽然目前阶段PC端对于淘客而言仍旧是盈利的大头,但移动端已经呈现出爆发之势。而且这个势头将随着智能终端(手机,平板)的加速普及而更加迅猛
- wordpress小工具制作
aichenglong
wordpress小工具
wordpress 使用侧边栏的小工具,很方便调整页面结构
小工具的制作过程
1 在自己的主题文件中新建一个文件夹(如widget),在文件夹中创建一个php(AWP_posts-category.php)
小工具是一个类,想侧边栏一样,还得使用代码注册,他才可以再后台使用,基本的代码一层不变
<?php
class AWP_Post_Category extends WP_Wi
- JS微信分享
AILIKES
js
// 所有功能必须包含在 WeixinApi.ready 中进行
WeixinApi.ready(function(Api) {
// 微信分享的数据
var wxData = {
&nb
- 封装探讨
百合不是茶
JAVA面向对象 封装
//封装 属性 方法 将某些东西包装在一起,通过创建对象或使用静态的方法来调用,称为封装;封装其实就是有选择性地公开或隐藏某些信息,它解决了数据的安全性问题,增加代码的可读性和可维护性
在 Aname类中申明三个属性,将其封装在一个类中:通过对象来调用
例如 1:
//属性 将其设为私有
姓名 name 可以公开
- jquery radio/checkbox change事件不能触发的问题
bijian1013
JavaScriptjquery
我想让radio来控制当前我选择的是机动车还是特种车,如下所示:
<html>
<head>
<script src="http://ajax.googleapis.com/ajax/libs/jquery/1.7.1/jquery.min.js" type="text/javascript"><
- AngularJS中安全性措施
bijian1013
JavaScriptAngularJS安全性XSRFJSON漏洞
在使用web应用中,安全性是应该首要考虑的一个问题。AngularJS提供了一些辅助机制,用来防护来自两个常见攻击方向的网络攻击。
一.JSON漏洞
当使用一个GET请求获取JSON数组信息的时候(尤其是当这一信息非常敏感,
- [Maven学习笔记九]Maven发布web项目
bit1129
maven
基于Maven的web项目的标准项目结构
user-project
user-core
user-service
user-web
src
- 【Hive七】Hive用户自定义聚合函数(UDAF)
bit1129
hive
用户自定义聚合函数,用户提供的多个入参通过聚合计算(求和、求最大值、求最小值)得到一个聚合计算结果的函数。
问题:UDF也可以提供输入多个参数然后输出一个结果的运算,比如加法运算add(3,5),add这个UDF需要实现UDF的evaluate方法,那么UDF和UDAF的实质分别究竟是什么?
Double evaluate(Double a, Double b)
- 通过 nginx-lua 给 Nginx 增加 OAuth 支持
ronin47
前言:我们使用Nginx的Lua中间件建立了OAuth2认证和授权层。如果你也有此打算,阅读下面的文档,实现自动化并获得收益。SeatGeek 在过去几年中取得了发展,我们已经积累了不少针对各种任务的不同管理接口。我们通常为新的展示需求创建新模块,比如我们自己的博客、图表等。我们还定期开发内部工具来处理诸如部署、可视化操作及事件处理等事务。在处理这些事务中,我们使用了几个不同的接口来认证:
&n
- 利用tomcat-redis-session-manager做session同步时自定义类对象属性保存不上的解决方法
bsr1983
session
在利用tomcat-redis-session-manager做session同步时,遇到了在session保存一个自定义对象时,修改该对象中的某个属性,session未进行序列化,属性没有被存储到redis中。 在 tomcat-redis-session-manager的github上有如下说明: Session Change Tracking
As noted in the &qu
- 《代码大全》表驱动法-Table Driven Approach-1
bylijinnan
java算法
关于Table Driven Approach的一篇非常好的文章:
http://www.codeproject.com/Articles/42732/Table-driven-Approach
package com.ljn.base;
import java.util.Random;
public class TableDriven {
public
- Sybase封锁原理
chicony
Sybase
昨天在操作Sybase IQ12.7时意外操作造成了数据库表锁定,不能删除被锁定表数据也不能往其中写入数据。由于着急往该表抽入数据,因此立马着手解决该表的解锁问题。 无奈此前没有接触过Sybase IQ12.7这套数据库产品,加之当时已属于下班时间无法求助于支持人员支持,因此只有借助搜索引擎强大的
- java异常处理机制
CrazyMizzz
java
java异常关键字有以下几个,分别为 try catch final throw throws
他们的定义分别为
try: Opening exception-handling statement.
catch: Captures the exception.
finally: Runs its code before terminating
- hive 数据插入DML语法汇总
daizj
hiveDML数据插入
Hive的数据插入DML语法汇总1、Loading files into tables语法:1) LOAD DATA [LOCAL] INPATH 'filepath' [OVERWRITE] INTO TABLE tablename [PARTITION (partcol1=val1, partcol2=val2 ...)]解释:1)、上面命令执行环境为hive客户端环境下: hive>l
- 工厂设计模式
dcj3sjt126com
设计模式
使用设计模式是促进最佳实践和良好设计的好办法。设计模式可以提供针对常见的编程问题的灵活的解决方案。 工厂模式
工厂模式(Factory)允许你在代码执行时实例化对象。它之所以被称为工厂模式是因为它负责“生产”对象。工厂方法的参数是你要生成的对象对应的类名称。
Example #1 调用工厂方法(带参数)
<?phpclass Example{
- mysql字符串查找函数
dcj3sjt126com
mysql
FIND_IN_SET(str,strlist)
假如字符串str 在由N 子链组成的字符串列表strlist 中,则返回值的范围在1到 N 之间。一个字符串列表就是一个由一些被‘,’符号分开的自链组成的字符串。如果第一个参数是一个常数字符串,而第二个是type SET列,则 FIND_IN_SET() 函数被优化,使用比特计算。如果str不在strlist 或st
- jvm内存管理
easterfly
jvm
一、JVM堆内存的划分
分为年轻代和年老代。年轻代又分为三部分:一个eden,两个survivor。
工作过程是这样的:e区空间满了后,执行minor gc,存活下来的对象放入s0, 对s0仍会进行minor gc,存活下来的的对象放入s1中,对s1同样执行minor gc,依旧存活的对象就放入年老代中;
年老代满了之后会执行major gc,这个是stop the word模式,执行
- CentOS-6.3安装配置JDK-8
gengzg
centos
JAVA_HOME=/usr/java/jdk1.8.0_45
JRE_HOME=/usr/java/jdk1.8.0_45/jre
PATH=$PATH:$JAVA_HOME/bin:$JRE_HOME/bin
CLASSPATH=.:$JAVA_HOME/lib/dt.jar:$JAVA_HOME/lib/tools.jar:$JRE_HOME/lib
export JAVA_HOME
- 【转】关于web路径的获取方法
huangyc1210
Web路径
假定你的web application 名称为news,你在浏览器中输入请求路径: http://localhost:8080/news/main/list.jsp 则执行下面向行代码后打印出如下结果: 1、 System.out.println(request.getContextPath()); //可返回站点的根路径。也就是项
- php里获取第一个中文首字母并排序
远去的渡口
数据结构PHP
很久没来更新博客了,还是觉得工作需要多总结的好。今天来更新一个自己认为比较有成就的问题吧。 最近在做储值结算,需求里结算首页需要按门店的首字母A-Z排序。我的数据结构原本是这样的:
Array
(
[0] => Array
(
[sid] => 2885842
[recetcstoredpay] =&g
- java内部类
hm4123660
java内部类匿名内部类成员内部类方法内部类
在Java中,可以将一个类定义在另一个类里面或者一个方法里面,这样的类称为内部类。内部类仍然是一个独立的类,在编译之后内部类会被编译成独立的.class文件,但是前面冠以外部类的类名和$符号。内部类可以间接解决多继承问题,可以使用内部类继承一个类,外部类继承一个类,实现多继承。
&nb
- Caused by: java.lang.IncompatibleClassChangeError: class org.hibernate.cfg.Exten
zhb8015
maven pom.xml关于hibernate的配置和异常信息如下,查了好多资料,问题还是没有解决。只知道是包冲突,就是不知道是哪个包....遇到这个问题的分享下是怎么解决的。。
maven pom:
<dependency>
<groupId>org.hibernate</groupId>
<ar
- Spark 性能相关参数配置详解-任务调度篇
Stark_Summer
sparkcachecpu任务调度yarn
随着Spark的逐渐成熟完善, 越来越多的可配置参数被添加到Spark中来, 本文试图通过阐述这其中部分参数的工作原理和配置思路, 和大家一起探讨一下如何根据实际场合对Spark进行配置优化。
由于篇幅较长,所以在这里分篇组织,如果要看最新完整的网页版内容,可以戳这里:http://spark-config.readthedocs.org/,主要是便
- css3滤镜
wangkeheng
htmlcss
经常看到一些网站的底部有一些灰色的图标,鼠标移入的时候会变亮,开始以为是js操作src或者bg呢,搜索了一下,发现了一个更好的方法:通过css3的滤镜方法。
html代码:
<a href='' class='icon'><img src='utv.jpg' /></a>
css代码:
.icon{-webkit-filter: graysc