锯齿波FMCW雷达目标检测原理
FMCW(Frequency Modulated Continuous Wave),即调频的连续波信号。目前在安防、自动驾驶等领域的应用极为广泛。本文从最基本的数学原理出发进行推导,对锯齿波体制FMCW雷达目标检测进行详细说明。
1.信号建模
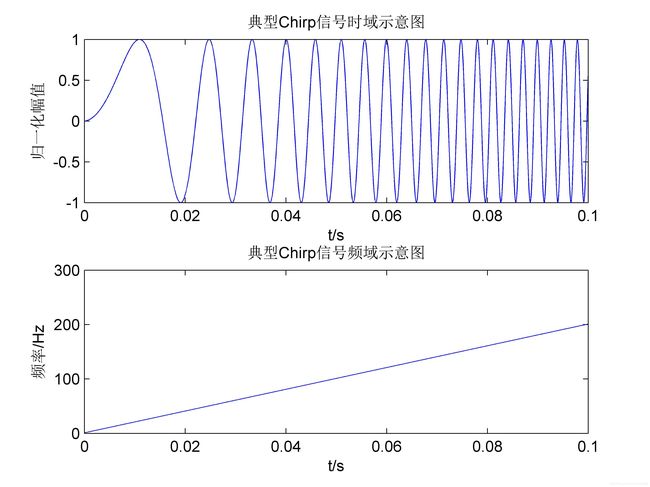
在许多文献里面,常看到Chirp信号这个说法,下面是一个典型的Chirp信号示意图。可以看到,从时域来看,信号是一个幅值恒定、频率变化的、时间连续的信号;从频域来看,信号的频率与时间呈现线性关系。其中 B B B为信号带宽、 f 0 f_{_0} f0为起始频率、 S = B T c S=\frac{B}{T_{_c}} S=TcB为斜率,这是Chirp信号的基本参数。
不失一般性,下文设信号为复信号进行推导。
从信号时频关系出发,可得信号的频率与时间的关系为 f = f 0 + S ∗ t f =f_{_0}+S*t f=f0+S∗t ,因此其相位为 φ = f 0 t + 1 2 S t 2 \varphi=f_{_0}t+\frac{1}{2}St^2 φ=f0t+21St2。不妨设信号为复信号,忽略幅度参数和噪声,设初始相位为 φ 0 \varphi_0 φ0, 则雷达发射信号为 s t = e j 2 π ( f 0 t + 1 2 S t 2 + φ 0 ) s_t=e^{j2\pi(f_{_0}t+\frac{1}{2}St^2+\varphi_{_0})} st=ej2π(f0t+21St2+φ0)
设静止目标据雷达的距离为 R R R,电磁波传输速度为 c c c,则接收信号的延迟为 τ = 2 R c \tau=\frac{2R}{c} τ=c2R。同样忽略传播过程中的幅度衰减和噪声,可得接收信号的数学表达式为 s r = e j 2 π [ f 0 ( t − τ ) + 1 2 S ( t − τ ) 2 ] s_r=e^{j2\pi[f_{_0}(t-\tau)+\frac{1}{2}S(t-\tau)^2]} sr=ej2π[f0(t−τ)+21S(t−τ)2]
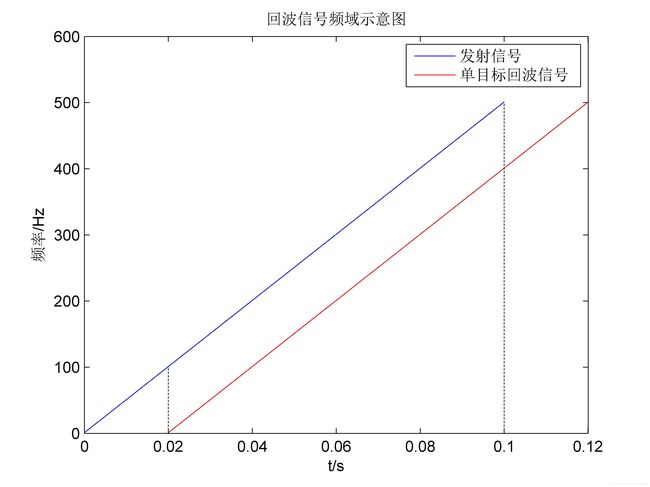
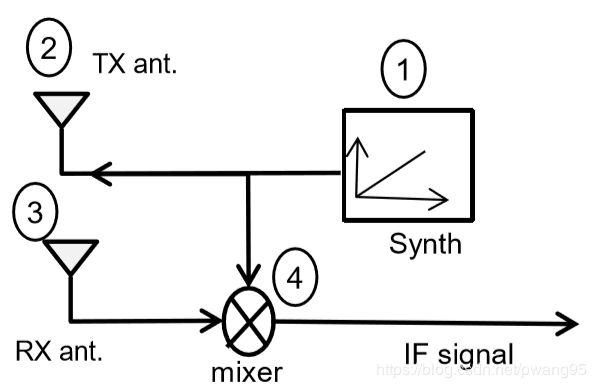 由图 2 示意图可将接收信号与发射信号混频,得到中频信号(IF Signal),即 s I F = e j 2 π f I F t s_{_{IF}} = e^{j2\pi f_{IF}t} sIF=ej2πfIFt由图 3 可得,中频信号的是一个单频信号(仅针对单个、静止目标)。所以中频信号为 s I F = e j 2 π S 2 R c t s_{_{IF}}=e^{j2\pi S\frac{2R}{c}t} sIF=ej2πSc2Rt
由图 2 示意图可将接收信号与发射信号混频,得到中频信号(IF Signal),即 s I F = e j 2 π f I F t s_{_{IF}} = e^{j2\pi f_{IF}t} sIF=ej2πfIFt由图 3 可得,中频信号的是一个单频信号(仅针对单个、静止目标)。所以中频信号为 s I F = e j 2 π S 2 R c t s_{_{IF}}=e^{j2\pi S\frac{2R}{c}t} sIF=ej2πSc2Rt
 若为运动目标,可将目标运动对传播时间 τ \tau τ 的影响进行考虑。
若为运动目标,可将目标运动对传播时间 τ \tau τ 的影响进行考虑。
设目标初始时刻位于 R 0 R_{_0} R0 处,且以速度 v v v 远离雷达而去,则 t t t 时刻目标离雷达的距离为 R = R 0 + v t R=R_{_0}+vt R=R0+vt。 将 τ = 2 R c = 2 ( R 0 + v t ) c \tau=\frac{2R}{c}=\frac{2(R_{_0}+vt)}{c} τ=c2R=c2(R0+vt)带入接收信号 s r s_r sr 表达式中可得 s r = e j 2 π [ f 0 ( t − 2 ( R 0 + v t ) c ) + 1 2 S ( t − 2 ( R 0 + v t ) c ) 2 ] s_r=e^{j2\pi[f_{_0}(t-\frac{2(R_{_0}+vt)}{c})+\frac{1}{2}S(t-\frac{2(R_{_0}+vt)}{c})^2]} sr=ej2π[f0(t−c2(R0+vt))+21S(t−c2(R0+vt))2]同理,将发射信号与接收信号混频,可得中频信号为 s I F = e j 2 π ( f 0 τ − 1 2 S ∗ τ 2 + S ∗ t ∗ τ ) s_{_{IF}}=e^{j2\pi(f_0\tau-\frac{1}{2}S*\tau^2+S*t*\tau)} sIF=ej2π(f0τ−21S∗τ2+S∗t∗τ)
可见,从严格的数学意义上来说, s I F s_{_{IF}} sIF 也是一个线性调频信号。
但是由于处理时间极短(通常在ms或者us量级),可忽略 t t t 的高次项;同时分母含有 c 2 c^2 c2 的项也可忽略。于是可得 s I F = ˙ e j 2 π [ ( 2 v f 0 c + 2 S R 0 c ) t + ( 2 R 0 f 0 c ) ] s_{_{IF}} \dot = e^{j2\pi[(\frac{2vf_{_0}}{c}+\frac{2SR_{_0}}{c})t+(\frac{2R_{_0}f_{_0}}{c})]} sIF=˙ej2π[(c2vf0+c2SR0)t+(c2R0f0)]这依然是一个单频信号。与静止目标所不同的是,此单频信号的频率中同时含有目标速度和距离信息,通过FFT无法直接准确测量出目标的距离信息。此现象叫做“速度与距离的耦合”,现以有许多算法对其进行“解耦合”(此处不展开)。同时,常数项 2 R 0 f 0 c \frac{2R_{_0}f_{_0}}{c} c2R0f0 包含着此次脉冲信号发射时目标的起始位置,这就给我们提供了测速的思路——可以连续发射多个脉冲,测量脉冲见的初始相位差。
2. 距离测量
2.1 目标距离检测基本原理
接收信号与发射信号混频,得到中频信号(IF Signal),即 s I F = e j 2 π f I F t s_{_{IF}} = e^{j2\pi f_{_{IF}}t} sIF=ej2πfIFt由图 3 可得,中频信号的是一个单频信号(仅针对单个、静止目标)。所以中频信号为 s I F = e j 2 π S 2 R c t s_{_{IF}}=e^{j2\pi S\frac{2R}{c}t} sIF=ej2πSc2Rt对其进行傅里叶变换,找出幅度谱峰值位置,即可得出其频率 f I F = S 2 R c f_{_{IF}}=S\frac{2R}{c} fIF=Sc2R, 从而得出目标的距离为 R = c ∗ f I F 2 S R=\frac{c*f_{_{IF}}}{2S} R=2Sc∗fIF
上述结论可以很自地推广到多目标的情形。即在不同距离处均有一静止目标,这些目标都会对信号进行反射,从而接收机接收到的应是由多个不同延迟的信号的和。对于每一个目标而言,分析思路和方法与前面的单目标情况完全类相同。不难得到,对应于多目标的中频信号是多个单频信号的叠加,从而经过FFT运算之后的幅度谱会得到多个峰值,每个峰值出现的频点位置与该目标与雷达的距离成比例( R = c f I F / 2 S R=cf_{_{IF}}/2S R=cfIF/2S).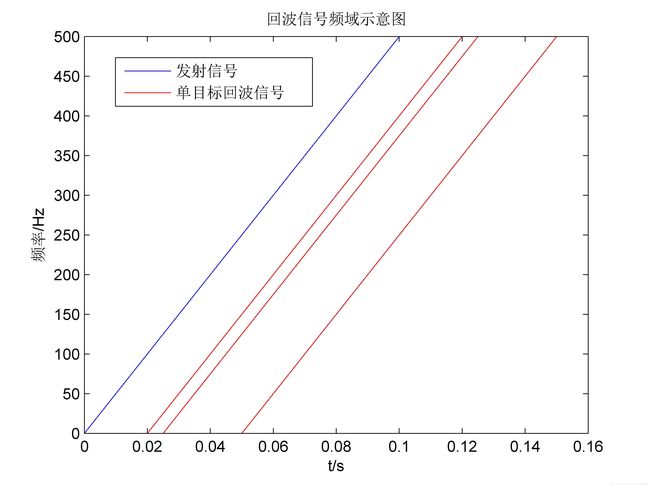 到此,对目标距离探测的基本推导已经结束。但是引出了一个新的问题,当两目标靠得比较近的时候,雷达是否可以区分处这两个目标呢?这就是下面将要讨论的雷法距离分辨率的问题。
到此,对目标距离探测的基本推导已经结束。但是引出了一个新的问题,当两目标靠得比较近的时候,雷达是否可以区分处这两个目标呢?这就是下面将要讨论的雷法距离分辨率的问题。
2.2 雷达分辨率
从上文可知,雷达对目标距离的检测最后是通过FFT运算,转变为对中频信号谱峰的定位。那么一个自然的想法是,FFT运算的分辨率将会影响中频信号频谱的分辨,从而影响雷达对目标距离的分辨率。
由数字信号处理知识可得,若信号观察时间为 T T T,则FFT运算之后频域的分辨率为 1 T \frac{1}{T} T1。设两目标相隔 Δ R \Delta R ΔR,此时俩目标分别对应中频信号频率差为 Δ f I F = S ∗ Δ τ = S 2 ∗ Δ R c \Delta f_{_{IF}}=S *\Delta\tau=S \frac{2*\Delta R}{c} ΔfIF=S∗Δτ=Sc2∗ΔR注意到此时的中频信号来源于对单Chirp的采样,观察时间为 T c T_c Tc, 从而有 Δ f I F = S 2 ∗ Δ R c > 1 T c \Delta f_{_{IF}}=S\frac{2*\Delta R}{c}>\frac{1}{T_c} ΔfIF=Sc2∗ΔR>Tc1将 S = B T c S=\frac{B}{T_c} S=TcB 带入上式,整理后可得 Δ R > c 2 B \Delta R>\frac{c}{2B} ΔR>2Bc可见,雷达对目标距离的分辨率由发射信号的带宽决定,增加带宽,将会得到更好的距离分辨能力,但同时也会增加硬件成本了信号处理的难度。
2.3 雷达最大可探测距离
一方面,从图 2 可以直观看出,目标距离雷达越远,得到的中频信号的频率 f I F = S ∗ τ = S 2 R c f_{_{IF}}=S*\tau=S \frac{2R}{c} fIF=S∗τ=Sc2R也就越高。然而在实际运用中,雷达器件的采样率 f s f_s fs 是有限的,那么这就限制了雷达可探测的最大距离。(此上限可以通过解模糊算法得到提高,后续在目标速度测量部分会有说明。)
另一方面,目标信号也会对”雷达的最大可探测距离“这一参数产生影响。雷达系统有一个关键参数叫“最小可探测信噪比”,其含义是,如果接收到的目标回波信噪比低于这一参数,将无法准确检测出目标。在毫米波雷达领域,由于一般不涉及吸波材料,通常直观的将这一参数和目标的反射截面积RCS对应起来。简单来说,对于反射越强的目标,可以探测到的距离越远。(此处不再展开)
上述两个方面的因素,均会影响”雷达的最大可探测距离“。但是,在设计雷达的时候,一般首先考虑雷达的中频采样率 f s f_s fs 的影响。
2.4 距离测量小结
在 2.1~2.3 节,对FMCW雷达对目标的距离测量基本原理作了简单说明。从 Δ R = c 2 B \Delta R=\frac{c}{2B} ΔR=2Bc 可以看出,要提高距离分辨能力(减小 Δ R \Delta R ΔR ),必须增加带宽;
但是从 f I F = S ∗ τ = B T ∗ 2 R c f_{_{IF}}=S*\tau=\frac{B}{T}* \frac{2R}{c} fIF=S∗τ=TB∗c2R大带宽会产生较高的中频频率,对其间的中频采样带来压力,可能无法满足奈奎斯特采样定理。
综上所述,雷达的距离分辨能力( Δ R \Delta R ΔR) 与 距离探测能力( R m a x R_{max} Rmax)是相互矛盾的,在实际设计中需要进行权衡。(岂能事事如人所愿?)
3. 速度测量
3.1 回波信号的二维FFT
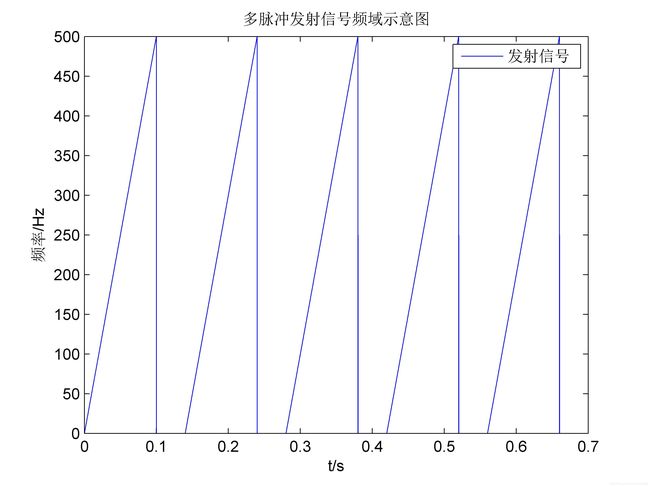
FMCW雷达对目标速度测量的基本原理,是连续发射一系列如下图的调频脉冲信号,对接收到的差频信号逐个做距离维的FFT,再所有脉冲信号的同一距离单元做第二次FFT,即可得到目标速度信息。
 具体推导如下。
具体推导如下。
前面已经推导得出单个脉冲回波的差频信号数学模型为 s I F = ˙ e j 2 π [ ( 2 v f 0 c + 2 S R 0 c ) t + ( 2 R 0 f 0 c ) ] s_{_{IF}} \dot = e^{j2\pi[(\frac{2vf_{_0}}{c}+\frac{2SR_{_0}}{c})t+(\frac{2R_{_0}f_{_0}}{c})]} sIF=˙ej2π[(c2vf0+c2SR0)t+(c2R0f0)]在此模型上继续考虑如下3个实际情况:
1.时间是离散的,由采样周期 T s T_s Ts 确定;
2.每个脉冲共采样 N N N 点数据;
3.连续发射 L L L 个脉冲;
4.目标运动速度径向分量为常数 v v v。
对上述单脉冲回波差频信号数学模型进行修改,可得 s I F = ˙ e j 2 π [ ( 2 v f 0 c + 2 S ( R 0 + v l T c ) c ) n T s + ( 2 ( R 0 + v l T c ) f 0 c ) ] s_{_{IF}} \dot = e^{j2\pi[(\frac{2vf_{_0}}{c}+\frac{2S(R_{_0}+vlT_c)}{c})nT_s+(\frac{2(R_{_0}+vlT_c)f_{_0}}{c})]} sIF=˙ej2π[(c2vf0+c2S(R0+vlTc))nTs+(c2(R0+vlTc)f0)]式中, n = 0 , 1 , 2 , . . . , N − 1 n=0,1,2,...,N-1 n=0,1,2,...,N−1 为单脉冲采样点序列; R 0 R_{_0} R0 为0时刻(雷达第一个发射脉冲的起始时刻)目标与雷达的径向距离; l = 0 , 1 , 2 , . . . , L − 1 l=0,1,2,...,L-1 l=0,1,2,...,L−1 为脉冲序列; T c T_c Tc 为脉冲重复时间(两相邻脉冲起始时刻之间的时间差)。
对于此表达式进行分析可知,针对某一个特定的脉冲( l l l 固定),信号 s I F s_{_{IF}} sIF 还是一个单频信号。与静止目标所不同的是多了一部分固定的值
e j 2 π [ ( 2 ( R 0 + v l T c ) f 0 c ) ] e^{j2\pi[(\frac{2(R_{_0}+vlT_c)f_{_0}}{c})]} ej2π[(c2(R0+vlTc)f0)]可以将这一项理解为原信号 e j 2 π [ ( 2 v f 0 c + 2 S ( R 0 + v l T s ) c ) n T s ] e^{j2\pi[(\frac{2vf_{_0}}{c}+\frac{2S(R_{_0}+vlT_s)}{c})nT_s]} ej2π[(c2vf0+c2S(R0+vlTs))nTs]的复包络,也可以理解为对原信号的一个相移。
针对同一个脉冲做FFT运算(以 n n n 为自变量),可得上述信号的频率成分 2 v f 0 c + 2 S ( R 0 + v l T s ) c \frac{2vf_{_0}}{c}+\frac{2S(R_{_0}+vlT_s)}{c} c2vf0+c2S(R0+vlTs)
对不同的脉冲做FFT(以 l l l 为自变量),相当于对上述差频信号的相位成分做傅里叶分析,可得信号的相位信息,此相位信息包含这目标的速度。
3.2 对速度测量本质的理解
从3.1节可以看出,目标的速度信息是包含在回波的相位中的。连续发射 L L L 个脉冲,其相位信息是随 l l l 变化的。对此相位信息做FFT,即可提取出其中包含的速度信息。那么,测度测量的本质是什么呢?
我们都知道,相位的导数是频率。其实对信号频率的测量,最后还是回到了信号相位改变上。FMCW信号对目标速度的测量,就是测量同一目标在相邻脉冲间的相位差,此相位差会反应在第二次FFT(以 l l l 为自变量)的频谱峰值上面。由此,可以很容易理解下面要讲到的最大测速极限和速度分辨率的概念。
3.3 最大无模糊速度
从3.2节可以知道,如果速度过大,则会引起相邻脉冲见的相位移动过大。在此,我们可以定义速度模糊的概念。
如相位在 ( − π , π ] (-\pi,\pi] (−π,π] 之间,则可认为相位是不模糊的。因为一旦超过这个范围,如 3 π 2 \frac{3\pi}{2} 23π ,我们无法确定这个相位究竟是 3 π 2 \frac{3\pi}{2} 23π 还是 − π 2 -\frac{\pi}{2} −2π 。
由此可以引申出速度模糊的定义:
当由速度引起的相邻脉冲间相移在 ( − π , π ] (-\pi,\pi] (−π,π] 时,此速度是不模糊的。
具体而言,需要 ∣ 2 π f 0 2 v T c c ∣ < π |2\pi f_{_{0}}\frac{2vT_{c}}{c}| < \pi ∣2πf0c2vTc∣<π
即 v < λ 4 T c v<\frac{\lambda}{4T_{_c}} v<4Tcλ
也就是说,单个目标速度超过此值时,由FFT测得的速度是不正确的。
当前也有许多解模糊的算法,不再赘述。
3.4 速度分辨率
速度分辨率的含义是,当两个目标的速度足够接近时,雷达还能够在速度维将目标分辨开来的极限。
当采用FFT对目标速度进行测量时,速度的分辨率其实就是FFT的分辨率。对于 L L L 个脉冲信号做 L L L 点FFT,分辨率为 Δ f = 2 π f 0 Δ v T C c > π L \Delta f=2\pi f_{_0}\frac{\Delta v T_{_C}}{c}>\frac{\pi}{L} Δf=2πf0cΔvTC>Lπ即 Δ v > λ 2 L T C \Delta v >\frac{\lambda}{2LT_{_C}} Δv>2LTCλ
4.小结
至此,锯齿波体制的FMCW雷达在距离和速度两个维度对目标的检测就已经讲述完毕了。
当然,具体检测中还涉及对目标的角度测量(DOA估计),CFAR检测,速度解模糊,目标聚类、目标跟踪等等算法。后续再尽量完善。
所有的公式和图片(混频示意图是copy的)都是我自己完成的,难免有错误,欢迎朋友很讨论和指正!