蓝桥杯——第四届省赛_模拟智能灌溉系统
一、使用到的模块
数码管、独立按键、LED、继电器、蜂鸣器、eeprom、AD、DS1302
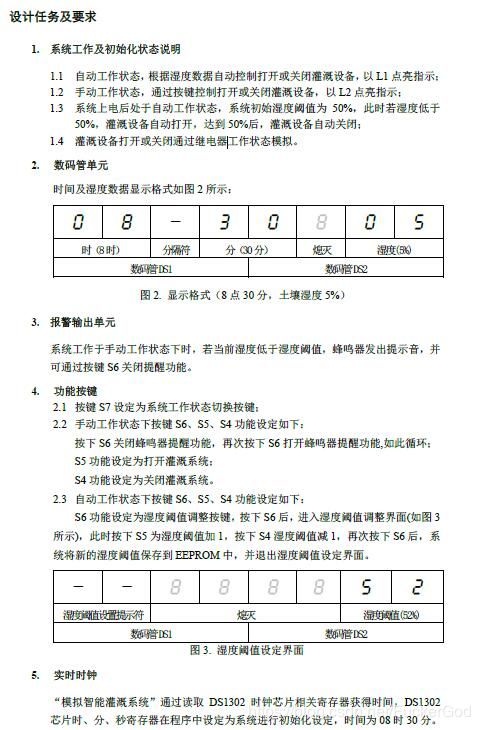
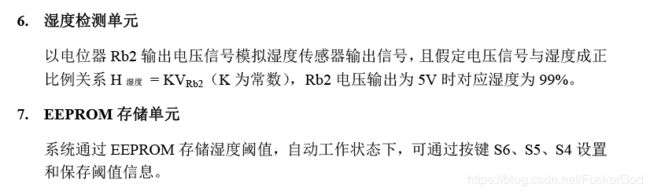
题目要求
二、代码部分
实验平台:CT107D
实验芯片:stc15f2k60s2
实验现象:完成题目要求
代码如下
ds1302.c
#include ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte( unsigned char address );
void set_sfm(unsigned char shi,unsigned char fen,unsigned char miao);
#endif
iic.c
#include "stc15f2k60s2.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
//总线引脚定义
sbit SDA = P2^1; /* 数据线 */
sbit SCL = P2^0; /* 时钟线 */
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//发送应答
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0:应答,1:非应答
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待应答
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
void write_eeprom(unsigned char add,unsigned char date)
{
IIC_Start();//启动总线
IIC_SendByte(0xa0);//发送设备地址,第八位为0所以为写
IIC_WaitAck();//等待应答
IIC_SendByte(add);//发送数据地址
IIC_WaitAck();//等待应答
IIC_SendByte(date);//发送数据
IIC_WaitAck();//等待应答
IIC_Stop();//停止总线
}
unsigned char read_eeprom(unsigned char add)
{
unsigned char temp;//定义变量temp用来获得eeprom中的数据
EA = 0;//关闭中断,中断可能会影响总线时序
IIC_Start();//开启总线
IIC_SendByte(0xa0);
//发送设备地址,第八位为0所以为写,因为读取的时候为读取现在的地址加一,所以要发送现在写的地址进去
IIC_WaitAck();//等待应答
IIC_SendByte(add);//发送数据地址
IIC_WaitAck();//等待应答
IIC_Start();//开启总线
IIC_SendByte(0xa1);//发送设备地址,第八位为1所以为读,读取的地址为刚刚我们写入的地址
IIC_WaitAck();//等待应答
temp = IIC_RecByte();//读取数据
IIC_WaitAck();//等待应答
IIC_Stop();//停止总线
EA = 1;//打开中断
return temp;//返回temp
}
void init_adc(unsigned char add)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Stop();
}
unsigned char read_adc()
{
unsigned char dat;
EA = 0;
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
dat = IIC_RecByte();
IIC_WaitAck();
IIC_Stop();
EA = 1;
return dat;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
void write_eeprom(unsigned char add,unsigned char date);
unsigned char read_eeprom(unsigned char add);
void init_adc(unsigned char add);
unsigned char read_adc();
#endif
main.c
#include