一分钟详解点云配准ICP方法
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者:丁洪凯
链接:https://zhuanlan.zhihu.com/p/107218828
本文转载自知乎,作者已授权,未经许可请勿二次转载。
1. ICP 算法简介
ICP 的经典论文:https://ieeexplore.ieee.org/document/121791
发表在 IEEE Transactions on Pattern Analysis and Machine Intelligence,此刊在工程技术大类属于1区,算是神刊了。
【大类】工程技术(1区);
【小类】COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE(1区);ENGINEERING, ELECTRICAL & ELECTRONIC(1区);
【2016-2018年平均IF】11.838;
【2017-2018年总被引】102333进入正题......
ICP 算法的第一步就是找到 Source 点云与 Target 点云中的对应点(corresponding point sets),然后针对对应点,通过最小二乘法构建目标函数,进行迭代优化。
1.1 估计对应点(Correspondences estimation)
ICP 称为 Iterative Closest Point,顾名思义,是通过最近邻法来估计对应点的。
对 Source 点云中的一点,求解其与 Target 点云中距离最近的那个点,作为其对应点。
当然,这样操作的时间复杂度很高,为了加速计算,我们不需要计算 Target 点云中每个点到 Source 点云中一点的距离。可以设定一个阈值,当距离小于阈值时,就将其作为对应点。
还有一些其他加速求解对应点的方法,如 ANN(Approximate Nearest Neighbor)。
1.2 迭代优化
找到对应点后,我们就构建了两组对应的点集:
求欧式变换 使得:
ICP 算法基于最小二乘法进行迭代计算,使得误差平方和达到极小值:
可通过以下三个步骤进行求解:
(1)定义两组点的质心,简化目标函数
其中, 交叉项部分 在求和之后零,因此目标函数简化为:
第一项只与旋转矩阵 有关,只要获得 ,令第二项为零就能求得 。
(2)计算每个点的去质心坐标,计算旋转矩阵
其中,第二项 与 无关,只有第三项与 有关。因而,目标函数变为:
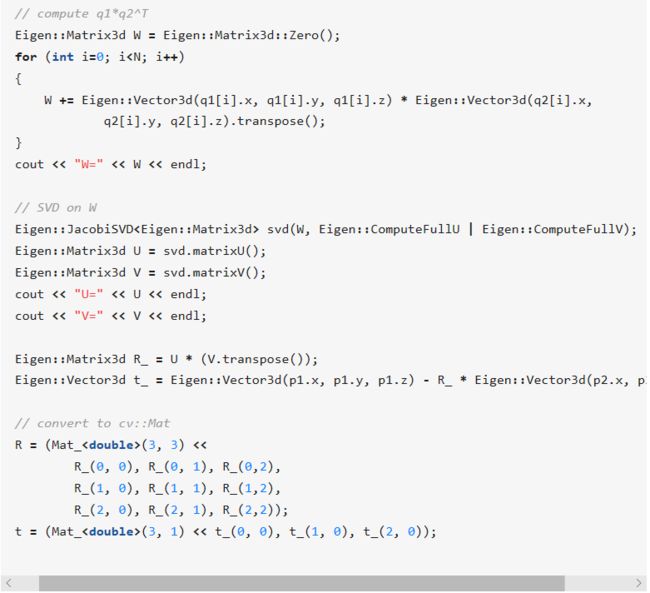
通过 Singular Value Decomposition (SVD) 来进行求解,先定义矩阵:
是一个 矩阵,对 进行 SVD 分解,得:
其中, 为奇异值组成的对角矩阵,当 满秩时, 为:
(3)计算平移矩阵
以下求解 ICP 的代码来自:高翔,视觉SLAM十四讲。

2. PCL 库中的 ICP 算法
基本使用
PCL 库中提供了如下几种点云配置算法:
pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >
pcl::GeneralizedIterativeClosestPoint< PointSource, PointTarget >
pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >
pcl::IterativeClosestPointNonLinear< PointSource, PointTarget, Scalar >
pcl::JointIterativeClosestPoint< PointSource, PointTarget, Scalar >
pcl::registration::IncrementalICP< PointT, Scalar >
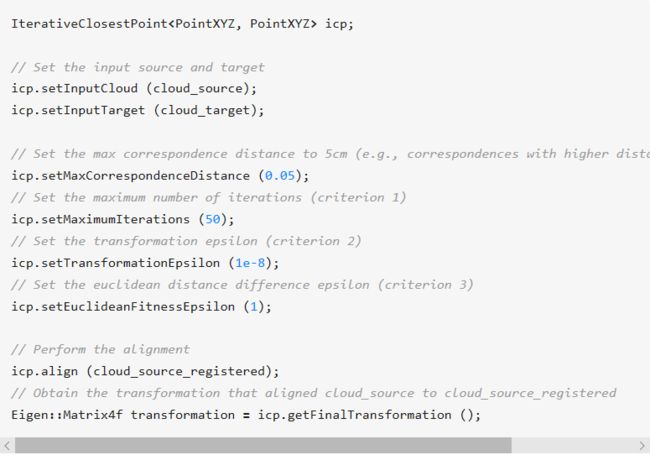
其中,IterativeClosestPoint 模板类是 ICP 算法的一个基本实现,其优化求解方法基于 Singular Value Decomposition (SVD),算法迭代结束条件包括:
最大迭代次数:Number of iterations has reached the maximum user imposed number of iterations (via setMaximumIterations)
两次变换矩阵之间的差值:The epsilon (difference) between the previous transformation and the current estimated transformation is smaller than an user imposed value (via setTransformationEpsilon)
均方误差:The sum of Euclidean squared errors is smaller than a user defined threshold (via setEuclideanFitnessEpsilon)
基本用法:
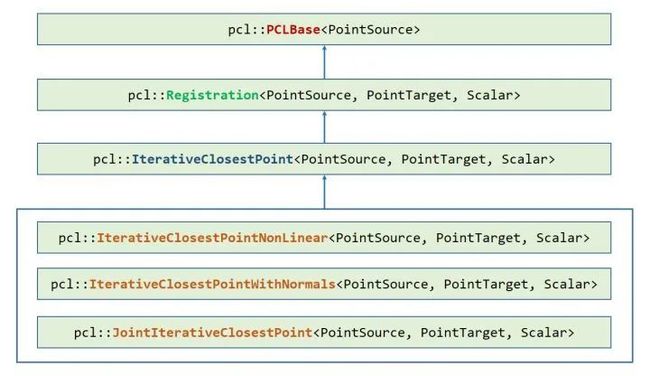
原理解析
PCL 中的 ICP 是通过Registeration 模板类实现的,其继承关系如下图所示。
ICP 点云配准的关键概念如下:
Keypoints 关键点:A keypoint is an interest point that has a "special property" in the scene. PCL 中的 NARF,SIFT,FAST 可以作为关键点,也可以把每一个点或部分点作为关键点;
Feature descriptors 特征描述子:每个关键点对应着一个特征描述子,相似的关键点有着相似的特征描述子,通常用一个向量表示;
Correspondences estimation 对应点估计:ICP 算法的第一步就是要找到对应点,即找到两个点云中 overlapping 的部分,分为 point matching 和 feature matching;
Correspondences rejection 对应点去除:去除不好的对应点可通过 RANSAC 实现,若模型点云中的一个点对应着场景点云中的若干点, 则只取距离最小的那个;
Transformation estimation 位姿变换估计:定义目标函数,迭代优化直到收敛。
主要流程如下图所示:
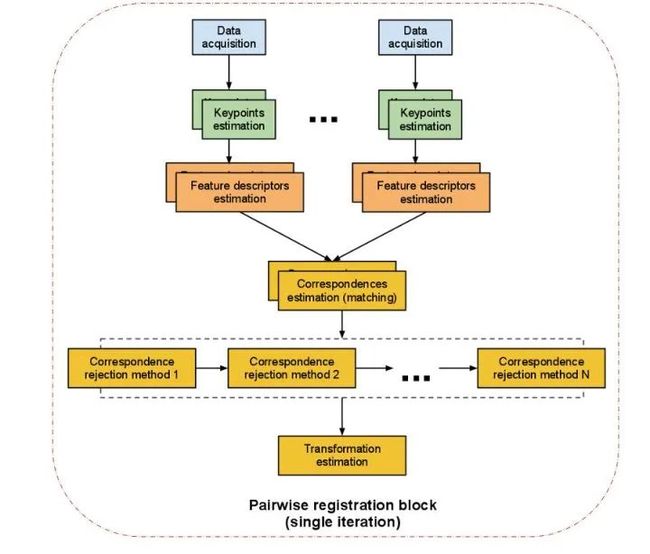
定义关键点,能够最好地表示场景(from a set of points, identify interest points (i.e., keypoints) that best represent the scene in both datasets);
针对每个关键点,计算特征描述子(at each keypoint, compute a feature descriptor);
基于相似的特征和位置,估计一系列对应点(from the set of feature descriptors together with their XYZ positions in the two datasets, estimate a set of correspondences, based on the similarities between features and positions);
假设数据是有噪声的,则并不是所有的对应点都是有效的,所以需要去除掉一些不好的对应点(given that the data is assumed to be noisy, not all correspondences are valid, so reject those bad correspondences that contribute negatively to the registration process);
基于好的对应点,估计位姿变换(from the remaining set of good correspondences, estimate a motion transformation)。
http://pointclouds.org/documentation/tutorials/registration_api.php#registration-api
3. PCL Demo
以下两个demo 来自 PCL Tutorial
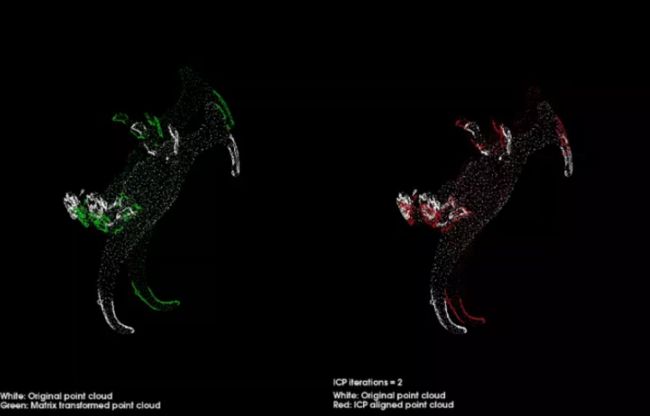
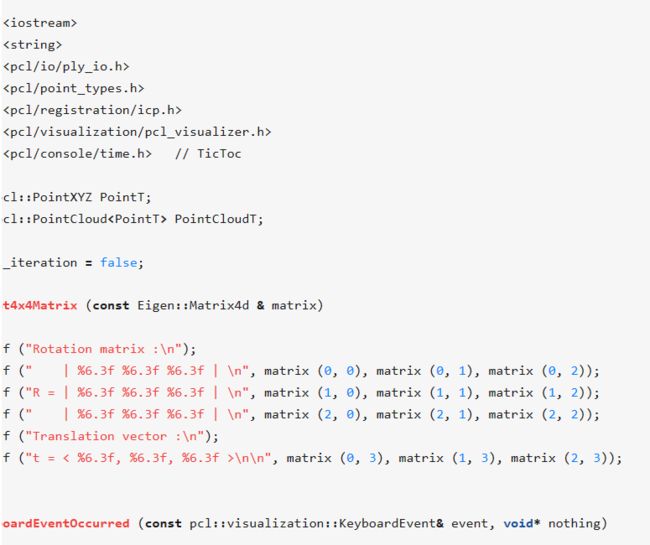
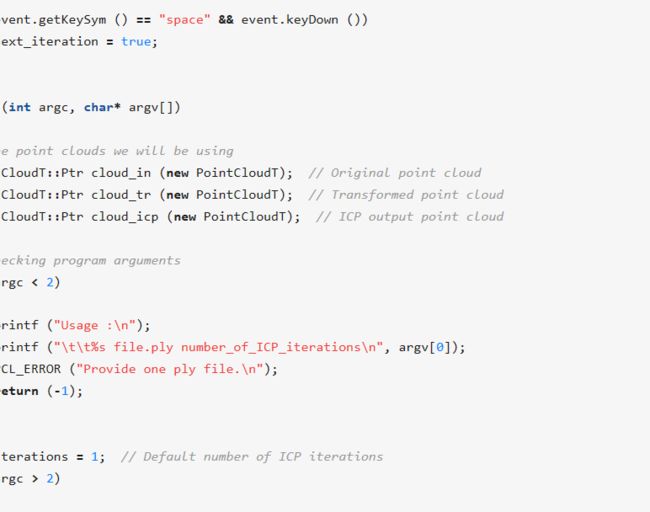
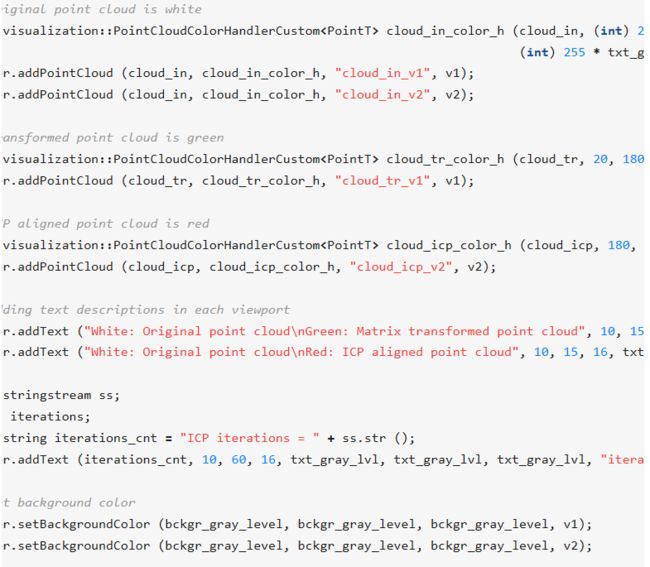
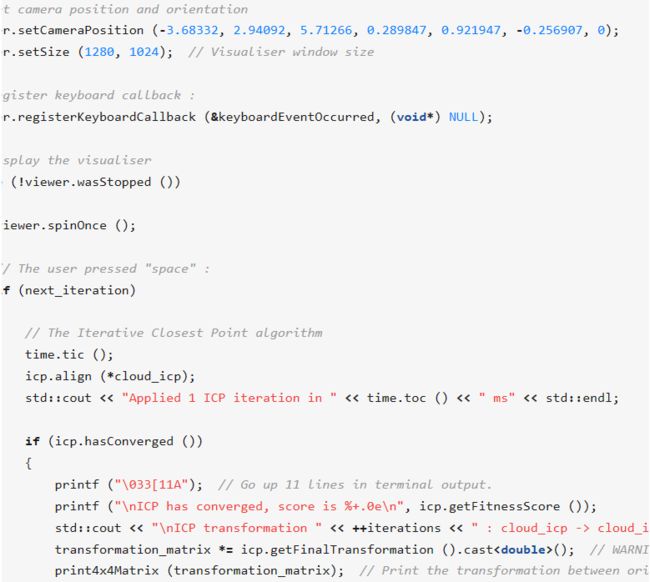
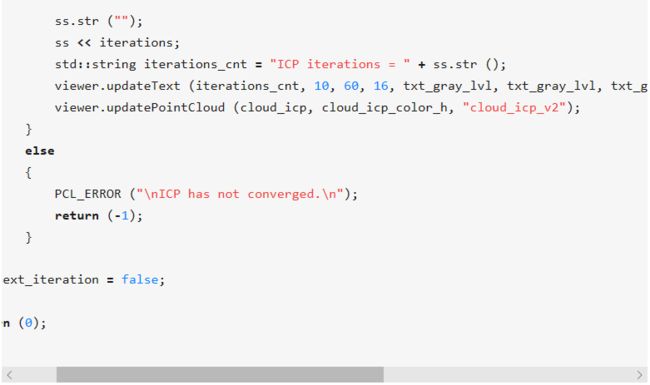
(1)Interactive ICP(交互式 ICP)http://pointclouds.org/documentation/tutorials/interactive_icp.php#id1
效果:按一下空格键,迭代一次



(2)Incrementally register pairs of clouds(多幅点云配准)
http://pointclouds.org/documentation/tutorials/pairwise_incremental_registration.php#pairwise-incremental-registration
点云模型:https://github.com/PointCloudLibrary/data/tree/master/tutorials/pairwise
效果:按 q 键进行迭代配准,同时生成配准后的点云
参考
高翔,视觉 SLAM 十四讲
ICP(迭代最近点)算法
PCL点云库:ICP算法
Interactive Iterative Closest Point
How to incrementally register pairs of clouds
推荐阅读:
吐血整理|3D视觉系统化学习路线
那些精贵的3D视觉系统学习资源总结(附书籍、网址与视频教程)
超全的3D视觉数据集汇总
大盘点|6D姿态估计算法汇总(上)
大盘点|6D姿态估计算法汇总(下)
机器人抓取汇总|涉及目标检测、分割、姿态识别、抓取点检测、路径规划
汇总|3D点云目标检测算法
汇总|3D人脸重建算法
那些年,我们一起刷过的计算机视觉比赛
总结|深度学习实现缺陷检测
深度学习在3-D环境重建中的应用
汇总|医学图像分析领域论文
大盘点|OCR算法汇总
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会(ICRA/IROS/ROBIO/CVPR/ICCV/ECCV等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近1000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、可答疑解惑、助你高效解决问题