毫米波雷达在无人机避障系统中的应用
电子科技大学 格拉斯哥学院 2017级 郝逸嘉
摘要:近年来,无人机技术得到了快速的发展和广泛的应用,预计在未来将被应用到更多的领域。尽管日趋成熟,目前无人机技术在实际应用中仍然存在着很多安全问题,同时还面临着相关法滞后的问题。本文讲述了无人机技术的研发现状,介绍了无人机避障系统的组成包括测距模块(雷达测距传感器等)以及它的工作原理和作用。最后分析了无人机技术发展所面临的问题及可能的解决方案。
关键词:无人机技术;避障系统;传感器;毫米波雷达;
无人机(Unmanned Aerial Vehicle,UAV)是由无线电遥控设备和自带的程序控制装置操纵,或由机载计算机全程或间歇操纵的不载人飞机。无人驾驶飞机是交互技术、GPS、雷达技术等的重要应用,具有重要研究意义,同时具备提升安全性和工作效率,降低成本和其他社会效益。无人驾驶飞行器通常比有人驾驶的飞行器更适合于完成那些太“枯燥、肮脏或危险”的任务。无人机在军事和民用领域都取得了长足的进步。其中,在民用领域,如航空摄影、农业、植保、微型自动定时器、特快运输、救灾、野生动物观察、传染病监测、测绘、新闻报道、电力巡视、救灾、胶片、电视拍摄、浪漫制作等极大地扩大了无人机本身的使用。发达国家也在不断积累经验,拓展无人机技术的产业应用,推动其发展。
1.无人机技术的研究现状
通过对无人机技术的研究和分析,发现目前大多数无人机防撞系统具有测距精度差、易受环境影响等缺点。为了解决这一问题,国外对多旋翼无人机防撞系统进行了深入的研究。2009年,Sobers等人研制了一架具备防撞系统的四旋翼飞机,其装有可用于室内定位和测绘的红外传感器。2012年,Chee和zhong开发了一种四旋翼无人机,能够在室外环境中自主导航和避障,使用位置控制器来调整使用四个红外传感器测量的障碍物的距离。之后,Gageik等人针对四旋翼无人机飞行过程中的碰撞问题,提出了采用12个超声波传感器的自主控制系统。
无人机在中国起步较晚。20世纪80年代以来,中国开辟了无人机自主研发之路。之后,随着军用民用需求的不断增长,无人机市场发展迅速。目前,我国无人机产业在各个应用领域都取得了巨大的成就,无论是在彩虹系列无人机在军事领域的应用,还是在新疆无人机在民用领域的应用,都位于世界前列。
2.无人机避障系统及常用测距传感器
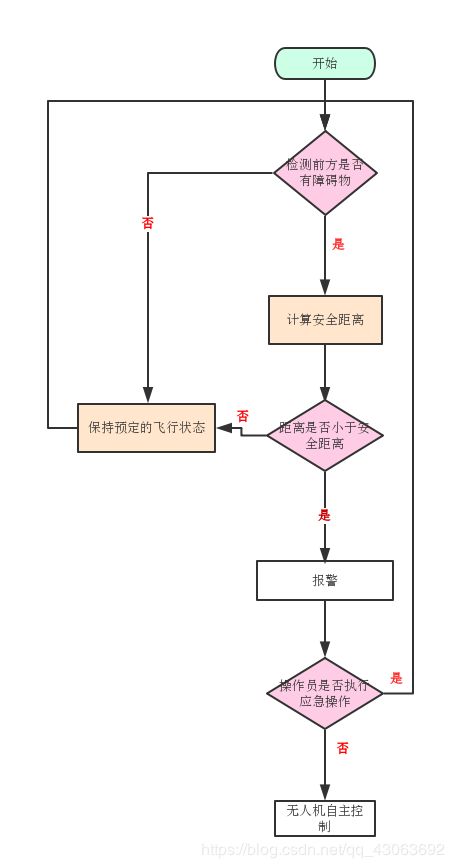
自主避障系统存在的缺陷是目前制约无人机发展的重大障碍,其带来的隐患可能导致无人机发生碰撞,造成一定的损失。如图所示为无人机的避障系统。无人机启动后,系统进行初始化,进入工作状态,运行过程中,首先检测前方是否有障碍物,若有则计算安全距离,若无障碍物或者大于安全距离则保持飞行状态,若小于安全距离,则启动报警系统,通知操作人员执行操作,若操作员放弃操作,则无人机进入自主制动模式。因此,无人机控制主要分为五大模块,即测距模块、无线通信模块、报警模块、指令执行模块及主控模块。
3.多种传感器在无人机测距方面的比较
感知障碍物的传感器主要包括超声波、红外、激光、雷达、视觉等。其中,超声波、红外、激光、雷达的原理如下:通过发射探测信号和接收障碍物的反射信号,可以得到障碍物形状及障碍物相对于传感器的距离等信息;而视觉传感器则是根据获取的障碍物的图像来计算“感知”障碍物的形状及障碍物相对于传感器的距离。下面对目前流行的无人机传感器进行介绍和比对。
3.1超声波测距传感器
超声波传感器具有体积小,重量轻,功耗低,信息处理过程简单等优点。但高探测精度与大的探测距离难以兼得,超声波波形受到杂质和散射反射的影响,因此常用于近距离障碍物检测。
3.2红外测距传感器
红外传感器具备灵敏度高、结构简单、成本低等优点,但是,远距离操作时,其获取的图像分辨率低,高温天气对红外线测距传感器精度也有较大影响。因此常用于探测突发障碍。
3.3激光测距传感器
激光传感器具有测量速度快,测量范围宽,测量精度高,镜面反射小,成本低等优点。但其易受环境影响,因此不能在恶劣天气下使用,测量距离不如微波雷达远。适用于天气良好情况下无人机避障。
3.4视觉测距传感器
视觉测距传感器具备画面直观,便于判读等优点。但是,云、雾、雨、雪等天气对图像质量影响很大,图像是灰色的,甚至不能看到障碍物。也是适用于天气良好情况下无人机壁障。
3.5雷法测距传感器
用于无人机的雷达包括微波、毫米波以及合成孔径雷达等。其中,微波雷达子在技术人员选取传感器的时候备受青睐。在探测障碍物时,即便障碍物的颜色和材料不同,微波雷达的反射率也不会发生变化。它能够在各种天气状况下稳定地检测各种障碍物,具有良好的抗干扰能力。此外还具备信息处理迅速、可远程、全天候、高分辨率等优点。由于小型机载天线不能形成锐波束,不能高精度地测量角度,对器件的加工精度要求很高。造价高昂。因此,其适用于精度要求不高的情况下的壁障系统,较大型的军用无人机平台等。
4.毫米波雷达测距原理
所谓的毫米波是无线电波中的一段,波长为1~10毫米的电磁波被称作毫米波,它位于微波与远红外波相交叠的波长范围内,具有两个光谱特性。毫米波的理论和技术分别是微波向高频的延伸和光波向低频的发展。
所谓毫米波雷达是指毫米波段的雷达。测距原理与一般雷达相同,即发射无线电波(雷达波),然后接收回波,根据发射机与接收机之间的时差测量目标的位置数据。
5.毫米波雷达测速方式
毫米波测速雷达系统主要由高频头、预处理系统、终端系统和红外启动器组成。其原理和结构如下所示。
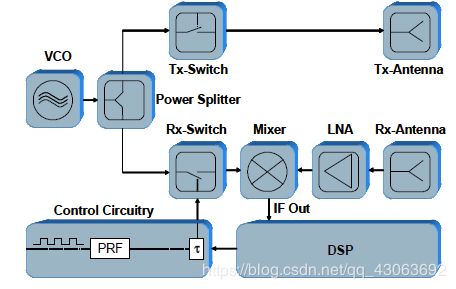
毫米波振荡器产生毫米波(8mm)振荡。振荡器的频率设置为fo。将隔离器添加到环行器中,然后由天线定向辐射。它以电磁波的形式在空间中传播。当电磁波在空间中遇到目标(弹丸)时,它反射回来。当目标运动时,在反射的电磁波频率上加上与目标速度vr成比例的多普勒频率fd,使得反向回波频率变为fo+fd(目标接近飞行“+”,目标远离飞行“%”)。该回波由天线接收,并通过循环器加到混频器中,并通过循环与混频器一起循环。将泄漏信号(作为本地振荡器信号)与fo混合。混频器是非线性元件。其输出具有各种和差频率,如fo、fo+fd、2fo+fd等。多普勒信号(频率fd)通过选择前置放大器的频率得到,然后通过长电缆(长度为50-100m)传输到预处理系统的主放大器。主放大器配有自动增益控制和手动增益控制电路。手动增益用于调整放大器的总增益,自动增益控制用于增加放大器的动态范围。
内弹道试验一般不采用自动增益控制,自动增益控制只适用于外弹道试验。为了避免喷嘴火焰等干扰,在开始试验前应进行适当的延迟。
毫米波雷达测速和普通雷达一样,有两种方式,一个基于dopler原理,就是当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。通过检测这个频率差可以测得目标相对于雷达的移动速度。但是这种方法无法探测切向速度,第二种方法就是通过跟踪位置,进行微分得到速度。
6.面临的挑战及可能的解决方案
虽然本文在前面描述了无人机的新的应用方向和潜在的应用前景,但是必须指出,无人机的发展仍然面临许多挑战。如果这些挑战未能成功应对,无人机的发展可能会停滞不前。目前,无人机将面临技术、安全和法律监督三个方面的挑战。
6.1技术
无人机只有在技术上取得重大突破才能达到革命性的高度。近年来,尽管无人机技术发展迅速,设计能力大大提高,但其应用范围仍然受到电池的耐久性和无人机本身的承载能力的限制。例如,当使用无人机运送货物时,如果无人机不能满足货物重量和交货距离的要求,那么无人机的应用场景将受到很大的限制。鉴于这些技术上的局限性,除了等待电池技术的进一步突破外,我们还可以设计更先进的航路规划算法,使无人机能够快速到达目的地,减少飞行损失。此外,让无人机在飞行过程中能够准确识别飞行路径上的障碍物,并准确绕飞或悬停,提高无人机在受到不同元素影响时的应变能力如超速,湿润和环境等是实现无人机智能化的重要一步。因此,未来无人机避障技术需要在以下几个方面取得突破:(1)双目视觉避障技术; (2)声呐系统避障技术; (3)“视觉+忆阻器”避障技术; (4)毫米波雷达;(5)四维雷达。
6.2安全
无人机虽然体积小,但因无人机在飞行过程中很容易受到干扰加之技术故障等原因,从高空坠落时,仍会对地面人员的人身安全构成很大威胁。此外,由于目前的雷达无法探测到无人机,已有像无人机影响机场飞机起飞和降落以及无人机降落在美国白宫和日本首相官邸的事件发生,使人们意识到潜在的由无人机构成的威胁。鉴于无人机带来的威胁,除了进一步提高无人机制造商的可靠性外,我们还需要考虑在一些特殊地区设立禁飞区,以防止无人机通过电子围栏和其他技术进入,以避免其造成的威胁。此外,我们也应确保无人机控制系统不会轻易受到病毒损害,对安全构成潜在威胁。
6.3法律监管
目前,各国无人机的管制标准不同,实施规模也不同。以中国为例,截至2015年12月31日,获得无人机飞行员证书的飞行员人数仅为2142人次。事实上,大量无人机处于无人监管的状态。有鉴于此,我们认为,除了进一步完善无人机的相关法律法规外,还需要提高整个行业的标准水平,引入适当的操作培训,提高无人机操作人员的相关素质。
7.结论
本文的研究结果表明,无人机技术仍处于不断发展和变化的阶段,在未来相当长的一段时间内将得到越来越广泛的应用。然而,在这一过程中,无人机技术仍面临许多挑战。只有成功地应对这些挑战,无人机技术才能得到更广泛的应用。
8.参考文献或链接
[1]周宗儒. 基于多传感器信息融合无人旋翼机自主防碰撞系统研究[D].兰州理工大学,2017.
[2]任力诺.无人机及其自动控制原理概述[J].科技传播,2018,10(19):146-148.
[3]曹清龙.先进无人机飞行控制技术探讨[J].技术与市场,2018,25(11):128+130.
[4]http://www.elecfans.com/baike/qichedianzi/qichedianzijichuzhichi/20180424667055.html
https://baijiahao.baidu.com/s?id=1575971200828956&wfr=spider&for=pc
特别声明:
此文为本人在参与完电子科技大学格拉斯哥学院2017级新生研讨会后所作。内容则是根据新生研讨会内容、所得资料(参考资料已列在本文第八项)及个人理解创作而来。在此鸣谢各位老师。此外,由于作者水平有限,文章中难免存在不足之处,诚恳地希望读者批评指正。