VGG论文翻译
翻译论文汇总:https://github.com/SnailTyan/deep-learning-papers-translation
Very Deep Convolutional Networks for Large-Scale Image Recognition
ABSTRACT
In this work we investigate the effect of the convolutional network depth on its accuracy in the large-scale image recognition setting. Our main contribution is a thorough evaluation of networks of increasing depth using an architecture with very small (3 × 3) convolution filters, which shows that a significant improvement on the prior-art configurations can be achieved by pushing the depth to 16–19 weight layers. These findings were the basis of our ImageNet Challenge 2014 submission, where our team secured the first and the second places in the localisation and classification tracks respectively. We also show that our representations generalise well to other datasets, where they achieve state-of-the-art results. We have made our two best-performing ConvNet models publicly available to facilitate further research on the use of deep visual representations in computer vision.
摘要
在这项工作中,我们研究了卷积网络深度在大规模的图像识别环境下对准确性的影响。我们的主要贡献是使用非常小的(3×3)卷积滤波器架构对网络深度的增加进行了全面评估,这表明通过将深度推到16-19加权层可以实现对现有技术配置的显著改进。这些发现是我们的ImageNet Challenge 2014提交的基础,我们的团队在定位和分类过程中分别获得了第一名和第二名。我们还表明,我们的表示对于其他数据集泛化的很好,在其它数据集上取得了最好的结果。我们使我们的两个性能最好的ConvNet模型可公开获得,以便进一步研究计算机视觉中深度视觉表示的使用。
1 INTRODUCTION
Convolutional networks (ConvNets) have recently enjoyed a great success in large-scale image and video recognition (Krizhevsky et al., 2012; Zeiler & Fergus, 2013; Sermanet et al., 2014; Simonyan & Zisserman, 2014) which has become possible due to the large public image repositories, such as ImageNet (Deng et al., 2009), and high-performance computing systems, such as GPUs or large-scale distributed clusters (Dean et al., 2012). In particular, an important role in the advance of deep visual recognition architectures has been played by the ImageNet Large-Scale Visual Recognition Challenge (ILSVRC) (Russakovsky et al., 2014), which has served as a testbed for a few generations of large-scale image classification systems, from high-dimensional shallow feature encodings (Perronnin et al., 2010) (the winner of ILSVRC-2011) to deep ConvNets (Krizhevsky et al., 2012) (the winner of ILSVRC-2012).
1 引言
卷积网络(ConvNets)近来在大规模图像和视频识别方面取得了巨大成功(Krizhevsky等,2012;Zeiler&Fergus,2013;Sermanet等,2014;Simonyan&Zisserman,2014)由于大的公开图像存储库,例如ImageNet,以及高性能计算系统的出现,例如GPU或大规模分布式集群(Dean等,2012),使这成为可能。特别是,在深度视觉识别架构的进步中,ImageNet大型视觉识别挑战(ILSVRC)(Russakovsky等,2014)发挥了重要作用,它已经成为几代大规模图像分类系统的测试台,从高维度浅层特征编码(Perronnin等,2010)(ILSVRC-2011的获胜者)到深层ConvNets(Krizhevsky等,2012)(ILSVRC-2012的获奖者)。
With ConvNets becoming more of a commodity in the computer vision field, a number of attempts have been made to improve the original architecture of Krizhevsky et al. (2012) in a bid to achieve better accuracy. For instance, the best-performing submissions to the ILSVRC-2013 (Zeiler & Fergus, 2013; Sermanet et al., 2014) utilised smaller receptive window size and smaller stride of the first convolutional layer. Another line of improvements dealt with training and testing the networks densely over the whole image and over multiple scales (Sermanet et al., 2014; Howard, 2014). In this paper, we address another important aspect of ConvNet architecture design —— its depth. To this end, we fix other parameters of the architecture, and steadily increase the depth of the network by adding more convolutional layers, which is feasible due to the use of very small (3 × 3) convolution filters in all layers.
随着ConvNets在计算机视觉领域越来越商品化,为了达到更好的准确性,已经进行了许多尝试来改进Krizhevsky等人(2012)最初的架构。例如,ILSVRC-2013(Zeiler&Fergus,2013;Sermanet等,2014)表现最佳的提交使用了更小的感受窗口尺寸和更小的第一卷积层步长。另一条改进措施在整个图像和多个尺度上对网络进行密集地训练和测试(Sermanet等,2014;Howard,2014)。在本文中,我们解决了ConvNet架构设计的另一个重要方面——其深度。为此,我们修正了架构的其它参数,并通过添加更多的卷积层来稳定地增加网络的深度,这是可行的,因为在所有层中使用非常小的(3×3)卷积滤波器。
As a result, we come up with significantly more accurate ConvNet architectures, which not only achieve the state-of-the-art accuracy on ILSVRC classification and localisation tasks, but are also applicable to other image recognition datasets, where they achieve excellent performance even when used as a part of a relatively simple pipelines (e.g. deep features classified by a linear SVM without fine-tuning). We have released our two best-performing models to facilitate further research.
因此,我们提出了更为精确的ConvNet架构,不仅可以在ILSVRC分类和定位任务上取得的最佳的准确性,而且还适用于其它的图像识别数据集,它们可以获得优异的性能,即使使用相对简单流程的一部分(例如,通过线性SVM分类深度特征而不进行微调)。我们发布了两款表现最好的模型1,以便进一步研究。
The rest of the paper is organised as follows. In Sect. 2, we describe our ConvNet configurations. The details of the image classification training and evaluation are then presented in Sect. 3, and the configurations are compared on the ILSVRC classification task in Sect. 4. Sect. 5 concludes the paper. For completeness, we also describe and assess our ILSVRC-2014 object localisation system in Appendix A, and discuss the generalisation of very deep features to other datasets in Appendix B. Finally, Appendix C contains the list of major paper revisions.
本文的其余部分组织如下。在第2节,我们描述了我们的ConvNet配置。图像分类训练和评估的细节在第3节,并在第4节中在ILSVRC分类任务上对配置进行了比较。第5节总结了论文。为了完整起见,我们还将在附录A中描述和评估我们的ILSVRC-2014目标定位系统,并在附录B中讨论了非常深的特征在其它数据集上的泛化。最后,附录C包含了主要的论文修订列表。
2 CONVNET CONFIGURATIONS
To measure the improvement brought by the increased ConvNet depth in a fair setting, all our ConvNet layer configurations are designed using the same principles, inspired by Ciresan et al. (2011); Krizhevsky et al. (2012). In this section, we first describe a generic layout of our ConvNet configurations (Sect. 2.1) and then detail the specific configurations used in the evaluation (Sect. 2.2). Our design choices are then discussed and compared to the prior art in Sect. 2.3.
2. ConvNet配置
为了衡量ConvNet深度在公平环境中所带来的改进,我们所有的ConvNet层配置都使用相同的规则,灵感来自Ciresan等(2011);Krizhevsky等人(2012年)。在本节中,我们首先描述我们的ConvNet配置的通用设计(第2.1节),然后详细说明评估中使用的具体配置(第2.2节)。最后,我们的设计选择将在2.3节进行讨论并与现有技术进行比较。
2.1 ARCHITECTURE
During training, the input to our ConvNets is a fixed-size 224 × 224 RGB image. The only preprocessing we do is subtracting the mean RGB value, computed on the training set, from each pixel. The image is passed through a stack of convolutional (conv.) layers, where we use filters with a very small receptive field: 3 × 3 (which is the smallest size to capture the notion of left/right, up/down, center). In one of the configurations we also utilise 1 × 1 convolution filters, which can be seen as a linear transformation of the input channels (followed by non-linearity). The convolution stride is fixed to 1 pixel; the spatial padding of conv. layer input is such that the spatial resolution is preserved after convolution, i.e. the padding is 1 pixel for 3 × 3 conv. layers. Spatial pooling is carried out by five max-pooling layers, which follow some of the conv. layers (not all the conv. layers are followed by max-pooling). Max-pooling is performed over a 2 × 2 pixel window, with stride 2.
在训练期间,我们的ConvNet的输入是固定大小的224×224 RGB图像。我们唯一的预处理是从每个像素中减去在训练集上计算的RGB均值。图像通过一堆卷积(conv.)层,我们使用感受野很小的滤波器:3×3(这是捕获左/右,上/下,中心概念的最小尺寸)。在其中一种配置中,我们还使用了1×1卷积滤波器,可以看作输入通道的线性变换(后面是非线性)。卷积步长固定为1个像素;卷积层输入的空间填充要满足卷积之后保留空间分辨率,即3×3卷积层的填充为1个像素。空间池化由五个最大池化层进行,这些层在一些卷积层之后(不是所有的卷积层之后都是最大池化)。在2×2像素窗口上进行最大池化,步长为2。
A stack of convolutional layers (which has a different depth in different architectures) is followed by three Fully-Connected (FC) layers: the first two have 4096 channels each, the third performs 1000-way ILSVRC classification and thus contains 1000 channels (one for each class). The final layer is the soft-max layer. The configuration of the fully connected layers is the same in all networks.
一堆卷积层(在不同架构中具有不同深度)之后是三个全连接(FC)层:前两个每个都有4096个通道,第三个执行1000维ILSVRC分类,因此包含1000个通道(一个通道对应一个类别)。最后一层是soft-max层。所有网络中全连接层的配置是相同的。
All hidden layers are equipped with the rectification (ReLU (Krizhevsky et al., 2012)) non-linearity. We note that none of our networks (except for one) contain Local Response Normalisation (LRN) normalisation (Krizhevsky et al., 2012): as will be shown in Sect. 4, such normalisation does not improve the performance on the ILSVRC dataset, but leads to increased memory consumption and computation time. Where applicable, the parameters for the LRN layer are those of (Krizhevsky et al., 2012).
所有隐藏层都配备了修正(ReLU(Krizhevsky等,2012))非线性。我们注意到,我们的网络(除了一个)都不包含局部响应规范化(LRN)(Krizhevsky等,2012):将在第4节看到,这种规范化并不能提高在ILSVRC数据集上的性能,但增加了内存消耗和计算时间。在应用的地方,LRN层的参数是(Krizhevsky等,2012)的参数。
2.2 CONFIGURATIONS
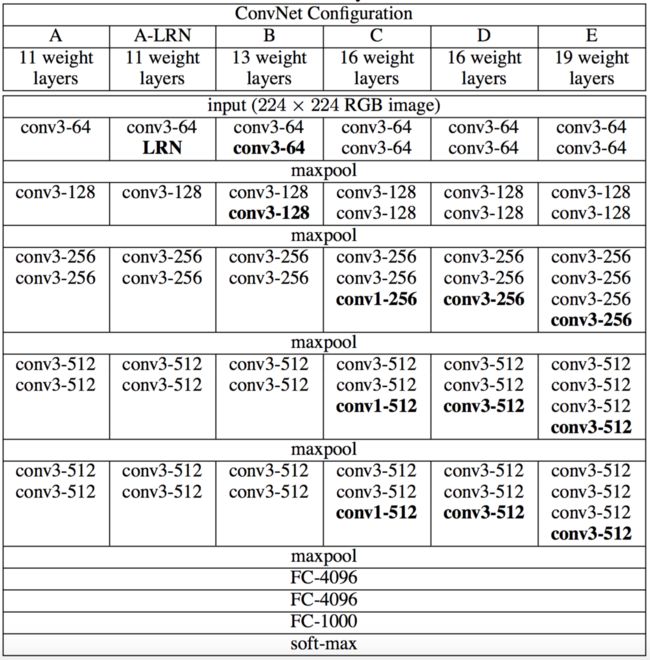
The ConvNet configurations, evaluated in this paper, are outlined in Table 1, one per column. In the following we will refer to the nets by their names (A–E). All configurations follow the generic design presented in Sect. 2.1, and differ only in the depth: from 11 weight layers in the network A (8 conv. and 3 FC layers) to 19 weight layers in the network E (16 conv. and 3 FC layers). The width of conv. layers (the number of channels) is rather small, starting from 64 in the first layer and then increasing by a factor of 2 after each max-pooling layer, until it reaches 512.
Table 1: ConvNet configurations (shown in columns). The depth of the configurations increases from the left (A) to the right (E), as more layers are added (the added layers are shown in bold). The convolutional layer parameters are denoted as “conv⟨receptive field size⟩-⟨number of channels⟩”. The ReLU activation function is not shown for brevity.
2.2 配置
本文中评估的ConvNet配置在表1中列出,每列一个。接下来我们将按网站名称(A-E)来提及网络。所有配置都遵循2.1节提出的通用设计,并且仅是深度不同:从网络A中的11个加权层(8个卷积层和3个FC层)到网络E中的19个加权层(16个卷积层和3个FC层)。卷积层的宽度(通道数)相当小,从第一层中的64开始,然后在每个最大池化层之后增加2倍,直到达到512。
表1:ConvNet配置(以列显示)。随着更多的层被添加,配置的深度从左(A)增加到右(E)(添加的层以粗体显示)。卷积层参数表示为“conv⟨感受野大小⟩-通道数⟩”。为了简洁起见,不显示ReLU激活功能。
In Table 2 we report the number of parameters for each configuration. In spite of a large depth, the number of weights in our nets is not greater than the number of weights in a more shallow net with larger conv. layer widths and receptive fields (144M weights in (Sermanet et al., 2014)).
Table 2: Number of parameters (in millions).

在表2中,我们报告了每个配置的参数数量。尽管深度很大,我们的网络中权重数量并不大于具有更大卷积层宽度和感受野的较浅网络中的权重数量(144M的权重在(Sermanet等人,2014)中)。
表2:参数数量(百万级别)
2.3 DISCUSSION
Our ConvNet configurations are quite different from the ones used in the top-performing entries of the ILSVRC-2012 (Krizhevsky et al., 2012) and ILSVRC-2013 competitions (Zeiler & Fergus, 2013; Sermanet et al., 2014). Rather than using relatively large receptive fields in the first conv. layers (e.g. 11 × 11 with stride 4 in (Krizhevsky et al., 2012), or 7 × 7 with stride 2 in (Zeiler & Fergus, 2013; Sermanet et al., 2014)), we use very small 3 × 3 receptive fields throughout the whole net, which are convolved with the input at every pixel (with stride 1). It is easy to see that a stack of two 3 × 3 conv. layers (without spatial pooling in between) has an effective receptive field of 5 × 5; three such layers have a 7 × 7 effective receptive field. So what have we gained by using, for instance, a stack of three 3 × 3 conv. layers instead of a single 7 × 7 layer? First, we incorporate three non-linear rectification layers instead of a single one, which makes the decision function more discriminative. Second, we decrease the number of parameters: assuming that both the input and the output of a three-layer 3 × 3 convolution stack has CC上进行评估。
The results, presented in Table 4, indicate that scale jittering at test time leads to better performance (as compared to evaluating the same model at a single scale, shown in Table 3). As before, the deepest configurations (D and E) perform the best, and scale jittering is better than training with a fixed smallest side S. Our best single-network performance on the validation set is 24.8%/7.5% top-1/top-5 error (highlighted in bold in Table 4). On the test set, the configuration E achieves 7.3% top-5 error.
Table 4: ConvNet performance at multiple test scales.
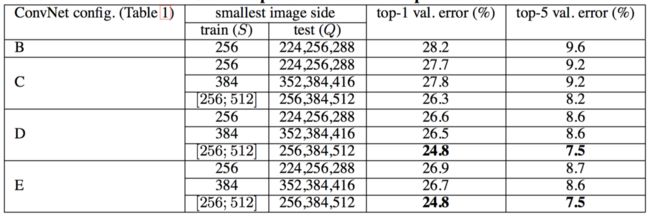
表4中给出的结果表明,测试时的尺度抖动导致了更好的性能(与在单一尺度上相同模型的评估相比,如表3所示)。如前所述,最深的配置(D和E)执行最佳,并且尺度抖动优于使用固定最小边S的训练。我们在验证集上的最佳单网络性能为24.8%/7.5% top-1/top-5的错误率(在表4中用粗体突出显示)。在测试集上,配置E实现了7.3% top-5的错误率。
表4:在多个测试尺度上的ConvNet性能
4.3 MULTI-CROP EVALUATION
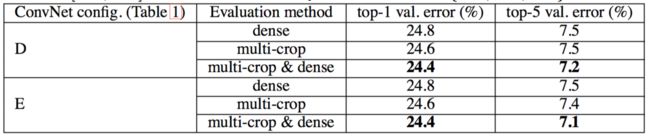
In Table 5 we compare dense ConvNet evaluation with mult-crop evaluation (see Sect. 3.2 for details). We also assess the complementarity of the two evaluation techniques by averaging their soft-max outputs. As can be seen, using multiple crops performs slightly better than dense evaluation, and the two approaches are indeed complementary, as their combination outperforms each of them. As noted above, we hypothesize that this is due to a different treatment of convolution boundary conditions.
Table 5: ConvNet evaluation techniques comparison. In all experiments the training scale S was sampled from [256; 512], and three test scales Q were considered: {256, 384, 512}.
4.3 多裁剪图像评估
在表5中,我们将稠密ConvNet评估与多裁剪图像评估进行比较(细节参见第3.2节)。我们还通过平均其soft-max输出来评估两种评估技术的互补性。可以看出,使用多裁剪图像表现比密集评估略好,而且这两种方法确实是互补的,因为它们的组合优于其中的每一种。如上所述,我们假设这是由于卷积边界条件的不同处理。
表5:ConvNet评估技术比较。在所有的实验中训练尺度S从[256;512]采样,三个测试适度Q考虑:{256, 384, 512}。
4.4 CONVNET FUSION
Up until now, we evaluated the performance of individual ConvNet models. In this part of the experiments, we combine the outputs of several models by averaging their soft-max class posteriors. This improves the performance due to complementarity of the models, and was used in the top ILSVRC submissions in 2012 (Krizhevsky et al., 2012) and 2013 (Zeiler & Fergus, 2013; Sermanet et al., 2014).
4.4 卷积网络融合
到目前为止,我们评估了ConvNet模型的性能。在这部分实验中,我们通过对soft-max类别后验进行平均,结合了几种模型的输出。由于模型的互补性,这提高了性能,并且在了2012年(Krizhevsky等,2012)和2013年(Zeiler&Fergus,2013;Sermanet等,2014)ILSVRC的顶级提交中使用。
The results are shown in Table 6. By the time of ILSVRC submission we had only trained the single-scale networks, as well as a multi-scale model D (by fine-tuning only the fully-connected layers rather than all layers). The resulting ensemble of 7 networks has 7.3% ILSVRC test error. After the submission, we considered an ensemble of only two best-performing multi-scale models (configurations D and E), which reduced the test error to 7.0% using dense evaluation and 6.8% using combined dense and multi-crop evaluation. For reference, our best-performing single model achieves 7.1% error (model E, Table 5).
Table 6: Multiple ConvNet fusion results.
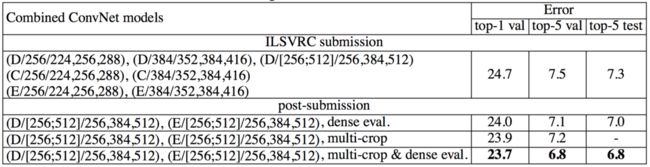
结果如表6所示。在ILSVRC提交的时候,我们只训练了单规模网络,以及一个多尺度模型D(仅在全连接层进行微调而不是所有层)。由此产生的7个网络组合具有7.3%的ILSVRC测试误差。在提交之后,我们考虑了只有两个表现最好的多尺度模型(配置D和E)的组合,它使用密集评估将测试误差降低到7.0%,使用密集评估和多裁剪图像评估将测试误差降低到6.8%。作为参考,我们表现最佳的单模型达到7.1%的误差(模型E,表5)。
表6:多个卷积网络融合结果
4.5 COMPARISON WITH THE STATE OF THE ART
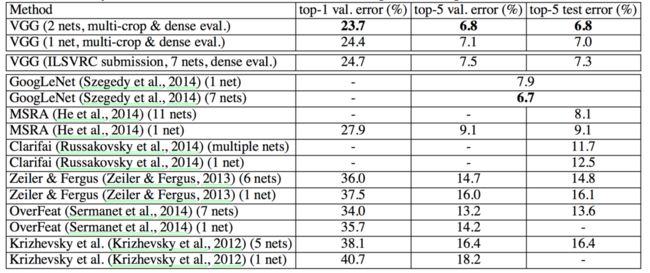
Finally, we compare our results with the state of the art in Table 7. In the classification task of ILSVRC-2014 challenge (Russakovsky et al., 2014), our “VGG” team secured the 2nd place with
7.3% test error using an ensemble of 7 models. After the submission, we decreased the error rate to 6.8% using an ensemble of 2 models.
Table 7: Comparison with the state of the art in ILSVRC classification. Our method is denoted as “VGG”. Only the results obtained without outside training data are reported.
4.5 与最新技术比较
最后,我们在表7中与最新技术比较我们的结果。在ILSVRC-2014挑战的分类任务(Russakovsky等,2014)中,我们的“VGG”团队获得了第二名,
使用7个模型的组合取得了7.3%测试误差。提交后,我们使用2个模型的组合将错误率降低到6.8%。
表7:在ILSVRC分类中与最新技术比较。我们的方法表示为“VGG”。报告的结果没有使用外部数据。
As can be seen from Table 7, our very deep ConvNets significantly outperform the previous generation of models, which achieved the best results in the ILSVRC-2012 and ILSVRC-2013 competitions. Our result is also competitive with respect to the classification task winner (GoogLeNet with 6.7% error) and substantially outperforms the ILSVRC-2013 winning submission Clarifai, which achieved 11.2% with outside training data and 11.7% without it. This is remarkable, considering that our best result is achieved by combining just two models —— significantly less than used in most ILSVRC submissions. In terms of the single-net performance, our architecture achieves the best result (7.0% test error), outperforming a single GoogLeNet by 0.9%. Notably, we did not depart from the classical ConvNet architecture of LeCun et al. (1989), but improved it by substantially increasing the depth.
从表7可以看出,我们非常深的ConvNets显著优于前一代模型,在ILSVRC-2012和ILSVRC-2013竞赛中取得了最好的结果。我们的结果对于分类任务获胜者(GoogLeNet具有6.7%的错误率)也具有竞争力,并且大大优于ILSVRC-2013获胜者Clarifai的提交,其使用外部训练数据取得了11.2%的错误率,没有外部数据则为11.7%。这是非常显著的,考虑到我们最好的结果是仅通过组合两个模型实现的——明显少于大多数ILSVRC提交。在单网络性能方面,我们的架构取得了最好节果(7.0%测试误差),超过单个GoogLeNet 0.9%。值得注意的是,我们并没有偏离LeCun(1989)等人经典的ConvNet架构,但通过大幅增加深度改善了它。
5 CONCLUSION
In this work we evaluated very deep convolutional networks (up to 19 weight layers) for large-scale image classification. It was demonstrated that the representation depth is beneficial for the classification accuracy, and that state-of-the-art performance on the ImageNet challenge dataset can be achieved using a conventional ConvNet architecture (LeCun et al., 1989; Krizhevsky et al., 2012) with substantially increased depth. In the appendix, we also show that our models generalise well to a wide range of tasks and datasets, matching or outperforming more complex recognition pipelines built around less deep image representations. Our results yet again confirm the importance of depth in visual representations.
5 结论
在这项工作中,我们评估了非常深的卷积网络(最多19个权重层)用于大规模图像分类。已经证明,表示深度有利于分类精度,并且深度大大增加的传统ConvNet架构(LeCun等,1989;Krizhevsky等,2012)可以实现ImageNet挑战数据集上的最佳性能。在附录中,我们还显示了我们的模型很好地泛化到各种各样的任务和数据集上,可以匹敌或超越更复杂的识别流程,其构建围绕不深的图像表示。我们的结果再次证实了深度在视觉表示中的重要性。
ACKNOWLEDGEMENTS
This work was supported by ERC grant VisRec no. 228180. We gratefully acknowledge the support of NVIDIA Corporation with the donation of the GPUs used for this research.
致谢
这项工作得到ERC授权的VisRec编号228180的支持.我们非常感谢NVIDIA公司捐赠GPU为此研究使用。
REFERENCES
Bell, S., Upchurch, P., Snavely, N., and Bala, K. Material recognition in the wild with the materials in context database. CoRR, abs/1412.0623, 2014.
Chatfield, K., Simonyan, K., Vedaldi, A., and Zisserman, A. Return of the devil in the details: Delving deep into convolutional nets. In Proc. BMVC., 2014.
Cimpoi, M., Maji, S., and Vedaldi, A. Deep convolutional filter banks for texture recognition and segmentation. CoRR, abs/1411.6836, 2014.
Ciresan, D. C., Meier, U., Masci, J., Gambardella, L. M., and Schmidhuber, J. Flexible, high performance convolutional neural networks for image classification. In IJCAI, pp. 1237–1242, 2011.
Dean, J., Corrado, G., Monga, R., Chen, K., Devin, M., Mao, M., Ranzato, M., Senior, A., Tucker, P., Yang, K., Le, Q. V., and Ng, A. Y. Large scale distributed deep networks. In NIPS, pp. 1232–1240, 2012.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proc. CVPR, 2009.
Donahue, J., Jia, Y., Vinyals, O., Hoffman, J., Zhang, N., Tzeng, E., and Darrell, T. Decaf: A deep convolutional activation feature for generic visual recognition. CoRR, abs/1310.1531, 2013.
Everingham, M., Eslami, S. M. A., Van Gool, L., Williams, C., Winn, J., and Zisserman, A. The Pascal visual object classes challenge: A retrospective. IJCV, 111(1):98–136, 2015.
Fei-Fei, L., Fergus, R., and Perona, P. Learning generative visual models from few training examples: An incremental bayesian approach tested on 101 object categories. In IEEE CVPR Workshop of Generative Model Based Vision, 2004.
Girshick, R. B., Donahue, J., Darrell, T., and Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. CoRR, abs/1311.2524v5, 2014. Published in Proc. CVPR, 2014.
Gkioxari, G., Girshick, R., and Malik, J. Actions and attributes from wholes and parts. CoRR, abs/1412.2604, 2014.
Glorot, X. and Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proc. AISTATS, volume 9, pp. 249–256, 2010.
Goodfellow, I. J., Bulatov, Y., Ibarz, J., Arnoud, S., and Shet, V. Multi-digit number recognition from street view imagery using deep convolutional neural networks. In Proc. ICLR, 2014.
Griffin, G., Holub, A., and Perona, P. Caltech-256 object category dataset. Technical Report 7694, California Institute of Technology, 2007.
He, K., Zhang, X., Ren, S., and Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. CoRR, abs/1406.4729v2, 2014.
Hoai, M. Regularized max pooling for image categorization. In Proc. BMVC., 2014.
Howard, A. G. Some improvements on deep convolutional neural network based image classification. In Proc. ICLR, 2014.
Jia, Y. Caffe: An open source convolutional architecture for fast feature embedding. http://caffe.berkeleyvision.org/, 2013.
Karpathy, A. and Fei-Fei, L. Deep visual-semantic alignments for generating image descriptions. CoRR, abs/1412.2306, 2014.
Kiros, R., Salakhutdinov, R., and Zemel, R. S. Unifying visual-semantic embeddings with multimodal neural language models. CoRR, abs/1411.2539, 2014.
Krizhevsky, A. One weird trick for parallelizing convolutional neural networks. CoRR, abs/1404.5997, 2014.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. ImageNet classification with deep convolutional neural networks. In NIPS, pp. 1106–1114, 2012.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard, R. E., Hubbard, W., and Jackel, L. D. Backpropagation applied to handwritten zip code recognition. Neural Computation, 1(4):541–551, 1989.
Lin, M., Chen, Q., and Yan, S. Network in network. In Proc. ICLR, 2014.
Long, J., Shelhamer, E., and Darrell, T. Fully convolutional networks for semantic segmentation. CoRR, abs/1411.4038, 2014.
Oquab, M., Bottou, L., Laptev, I., and Sivic, J. Learning and Transferring Mid-Level Image Representations using Convolutional Neural Networks. In Proc. CVPR, 2014.
Perronnin, F., Sa ́nchez, J., and Mensink, T. Improving the Fisher kernel for large-scale image classification. In Proc. ECCV, 2010.
Razavian, A., Azizpour, H., Sullivan, J., and Carlsson, S. CNN Features off-the-shelf: an Astounding Baseline for Recognition. CoRR, abs/1403.6382, 2014.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S., Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bernstein, M., Berg, A. C., and Fei-Fei, L. ImageNet large scale visual recognition challenge. CoRR, abs/1409.0575, 2014.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus, R., and LeCun, Y. OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks. In Proc. ICLR, 2014.
Simonyan, K. and Zisserman, A. Two-stream convolutional networks for action recognition in videos. CoRR, abs/1406.2199, 2014. Published in Proc. NIPS, 2014.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., Erhan, D., Vanhoucke, V., and Rabinovich, A. Going deeper with convolutions. CoRR, abs/1409.4842, 2014.
Wei, Y., Xia, W., Huang, J., Ni, B., Dong, J., Zhao, Y., and Yan, S. CNN: Single-label to multi-label. CoRR, abs/1406.5726, 2014.
Zeiler, M. D. and Fergus, R. Visualizing and understanding convolutional networks. CoRR, abs/1311.2901, 2013. Published in Proc. ECCV, 2014.