视觉融合里程计SLAM算法SE2Lam解析-论文篇
解析论文名称是:Visual-Odometric Localization and Mapping for Ground Vehicles Using SE(2)-XYZ Constraints
代码的github地址是:https://github.com/izhengfan/se2lam
时隔多年,其实也没几年,决定开始写第二篇博客,选择该主题的原因是,在研究IMU预积分的时候,很多地方都存在疑问,但是轮式odometry不一样,首先从应用就可以得知,是二维平面约束,二维形式非常简单,里程计的噪声及残差公式也极容易理解,可以为imu预积分理论提供非常好的参考意义。另外,本文不是翻译论文,觉得纯翻译没有意义,所以某些地方就用个人理解来表达。言归正传,正式开始解析。(注:该文章参考了很多ORB-SLAM2的技巧,感觉像个非常精简版的ORB-SLAM2)
第一部分:基础知识以及定义
A.坐标系和基本定义

图中定义的也比较清楚,L1, L2....表示的应该是世界坐标系下路标点的位置,论文中没说,但是从公式![]()
可看出,其中cl为摄像机坐标系下的坐标,方便算重投影误差吧。![]() 分别表示在Body坐标系下的旋转平移在世界坐标系world下的表示,即B到W,再通俗点就是当前body在world下的位姿。
分别表示在Body坐标系下的旋转平移在世界坐标系world下的表示,即B到W,再通俗点就是当前body在world下的位姿。![]()
![]() 表示向量对应的SE2位姿, 即
表示向量对应的SE2位姿, 即
![]() 代表了3维向量的成员。
代表了3维向量的成员。![]() 表示旋转向量与旋转矩阵的转换,即李群对应的李代数。逆变换如下:
表示旋转向量与旋转矩阵的转换,即李群对应的李代数。逆变换如下:![]() 由于我们主要关注的是Body系关于world系下的表示,因此直接简写为如下形式:
由于我们主要关注的是Body系关于world系下的表示,因此直接简写为如下形式:![]()
B. 非线性图优化
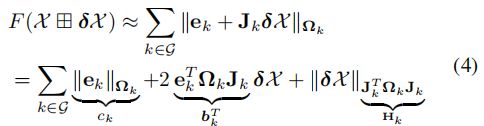
最小化代价函数如下:

X中的元素代表了图节点和边,ek(x)表示误差函数,![]() 为信息矩阵(协方差矩阵的逆),可以简单理解为误差函数的权重。线性化增量方程,代价函数(非线性)可近似为:
为信息矩阵(协方差矩阵的逆),可以简单理解为误差函数的权重。线性化增量方程,代价函数(非线性)可近似为:
ek的雅克比为
![]()
可参考视觉SLAM十四讲,将状态变量,雅克比,误差函数构造高斯牛顿增量方程(根据选取的优化方法不同,形式略微差别)
![]()
因此更新状态![]() 直到收敛,其中
直到收敛,其中![]()
![]()
第二部分:SE2-XYZ 约束的图优化
该部分的讲解,还是按照论文中的方式,关于前端跟踪,关键帧的插入,后端关键帧剔除,窗口优化以及回环检测,Global Ba等放入下一篇代码篇进行详细解析。另外论文中,提示为保证实时性以及过滤地面不平,剧烈运动等情况,所以只对关键帧做优化, 下一讲代码中可以看到,前端没有任何优化的部分。位姿图优化如下所示:

A.基于特征的SE2约束
考虑关键帧i,观测到了某个路标点l,测量模型可以写为

其中![]() 表示body和camera之间的旋转和平移,通过提前标定获得(已知量)。
表示body和camera之间的旋转和平移,通过提前标定获得(已知量)。![]() 代表特征测量噪声服从高斯分布,该噪声项在orb-slam2中根据金字塔层数不同取为n个1.2 相乘,表示的含义也很清楚明白,就是当前检测到的特征点根据图像分辨率不同,大小不同,例如在第0层的时候,不确定为1.2,也就是说,以当前像素为圆心,1.2为半径画个圆,真正的特征可能落在该圆内任意位置,好吧,没有画图,详细大家都能理解,说的不对的地方,请大家指正。再来细看下,公式(7),
代表特征测量噪声服从高斯分布,该噪声项在orb-slam2中根据金字塔层数不同取为n个1.2 相乘,表示的含义也很清楚明白,就是当前检测到的特征点根据图像分辨率不同,大小不同,例如在第0层的时候,不确定为1.2,也就是说,以当前像素为圆心,1.2为半径画个圆,真正的特征可能落在该圆内任意位置,好吧,没有画图,详细大家都能理解,说的不对的地方,请大家指正。再来细看下,公式(7), 表示的是camera系下,该路标点的3D坐标,
表示的是camera系下,该路标点的3D坐标,![]() 表示的是投影矩阵,将camera坐标系转换到像素坐标。论文中指出的具体公式
表示的是投影矩阵,将camera坐标系转换到像素坐标。论文中指出的具体公式
![]() 的SE2表示
的SE2表示
![]()
这个公式表示非常简单,不展开了

(fx, fy)表示焦距,(cx, cy)表示主点。
投影矩阵的雅可比很简单,将(9)式展开直接关于路标点求就好了,直接给出论文中的结论

现在可以合并扰动噪声项到公式(7)假设纵向平移噪声为![]() ,旋转噪声扰动为
,旋转噪声扰动为![]()
因此,扰动位姿为

测量模型(7)变为
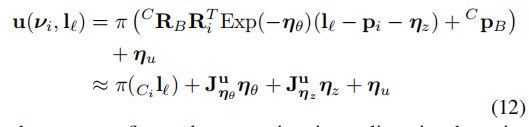
使用一阶近似,线性化噪声项,u关于![]() 的雅可比如下:
的雅可比如下:

(13)式的雅可比推导也比较简单,先看第一个式子,接下来的推导中,开口向下的尖表示反对称矩阵
开口向上的尖,表示向量

再来看式(13)第二个式子:同上

导数知道了,接下来就是协方差矩阵的传播了,这个传播的推导以后再说吧,这里直接给出论文中的结果。记0均值的噪声项为
![]()
![]() 因此,协方差矩阵为
因此,协方差矩阵为

其中![]() 是相互独立的,ei是3x3的单位矩阵I3中第i列.
是相互独立的,ei是3x3的单位矩阵I3中第i列.![]()
由检测到的特征,与预测特征之间构建SE2-XYZ约束残差
![]()
信息矩阵为协方差的逆![]() ,
,![]() 关于
关于![]() 的雅可比矩阵如下:
的雅可比矩阵如下:

如果在![]() 省略掉
省略掉![]() ,,则
,,则![]() 统一写为
统一写为![]()
式(16)的几个雅可比均不需要推导,前两个多出来的部分是因为二维的位姿,省略无关项而已,最后一个推导可参考(13)-2
B. 预积分里程计约束
此处里程计不区分运动学模型,无论差分还是全向模型均可适用,提供k和k+1两个连续帧之间的里程计测量

且SE2上的状态传播
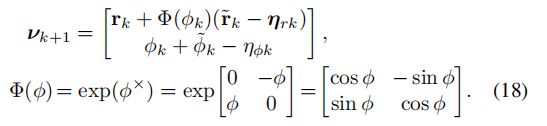
注意传播的![]() 依赖于旋转状态
依赖于旋转状态![]() 为了产生不依赖
为了产生不依赖![]() 的两个关键帧i,j之间的测量模块,在(18)式关于rk的那个方程左右同时乘以
的两个关键帧i,j之间的测量模块,在(18)式关于rk的那个方程左右同时乘以![]()

因此,关键帧i和j之间的预积分测量和噪声项可表示为:
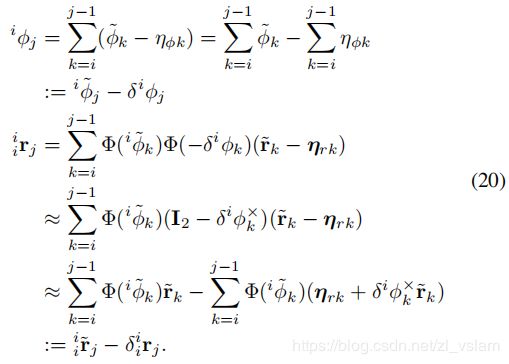
为了传播积分的噪声项,其迭代过程如下所示:

将(21)写为更紧凑的形式

因此,两时刻的噪声协方差传播公式如下所示:
![]()
初始时刻设置为0
此时,两个关键帧之间的里程计约束残差项定义为:

值得说明的是,上式中计算带~的为估计值,不带的为测量值,即假设i时刻轮式里程计输出的结果为(x,y, theta),估计值应该为(x * uncertain + noise , y * uncertain + noise, theta * uncertain + noise),这里理解的可能有问题,作为开放问题讨论下吧。
根据式(19)-(23)残差![]() 的信息矩阵为
的信息矩阵为![]() ,雅克比矩阵求解如下:
,雅克比矩阵求解如下:
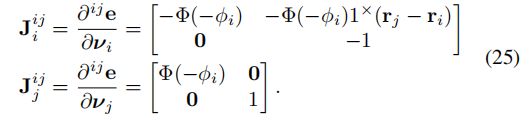
这个雅可比推导很简单,再来推导下,(25)中第一个式子的倒数为分别对式(24)残差项中的状态量求雅可比,即
先对i时刻状态求雅可比



至此,论文中的关于雅可比的导数均已推导,目前可能还存在编辑上的错误,请大家谅解,打字编辑公式不容易啊,好了,希望对大家有所帮助吧